Lecture3 - ROS 2 Node Programming, ROS 2 parameter
Python을 사용하여 Node Programming을 실습해봅시다. 강의 마지막에는 간단히 C++ 코딩에 대해서도 다뤄보겠습니다.
example 1 - Hello ROS 2
강의를 위해 준비된 예제 코드 패키지를 실습하고 분석하겠습니다.
$ colcon build --packages-select cbp py_node_tutorial
$ source install/local_setup.bash
$ ros2 run py_node_tutorial example_node_1
[INFO] [1672463872.778216198] [example_node_1]:
==== Hello ROS 2 ====
- 모든 예제 코드는 아래 링크에서 확인할 수 있습니다.
https://github.com/RB2023ROS/du2023-ros2/tree/main/py_node_tutorial/py_node_tutorial
코드 분석을 차근차근 함께 해보겠습니다.
rcl은 ROS Client Libraries의 약자로 ROS 2에서는 rclc, rclcpp, rclpy, rcljs와 같은 다양한 언어를 지원하고 있습니다. 파이썬에서 ROS 2 개발을 하기 위해서는 필수적으로 rclpy의 import가 필요하며 Node의 사용을 위해서는 Node class를 import 해야 합니다.
# !/usr/bin/env python3
import rclpy
from rclpy.node import Node
- rclpy 코딩 규칙
ROS 2에서 파이썬 파일을 조회하고 실행하는 과정이 있어 아래와 같이 main()부분을 항상 따로 분리하여 작성하도록 합니다.
if __name__ == '__main__':
"""main function"""
main()
- Node 생성
def main(args=None):
"""Do enter into this main function first."""
rclpy.init(args=args)
node = Node('node_name')
node.get_logger().info('\n==== Hello ROS 2 ====')
node.destroy_node()
rclpy.shutdown()
실제 동작을 수행하는 main 함수를 살펴보면 다음과 같은 과정을 거치고 있습니다.
- rclpy.init을 통해 initialization, 즉 초기화를 하고 있습니다.
- node = Node(’node_name’) : Node를 생성하는 부분으로 앞서 import한 Node class를 사용하고 있습니다. 매개변수로 node의 이름이 들어갑니다.
- node.destroy_node() : Node를 생성하고 원하는 작업을 모두 수행했다면, 이제 사용했던 Node를 제거해야 할 것입니다. 그래야 불필요한 자원의 낭비를 줄일 수 있겠지요.
- rclpy.shutdown() : 이번 예제의 제일 첫 부분에 rclpy.init을 통하여 초기화를 해주었습니다. 이제 rclpy를 통한 작업이 모두 끝났으므로 안전하게 종료시켜줍니다.
위 과정이 Python에서 rclpy를 통해 Node를 다루는 기본 절차입니다.
1과 4, 2와 3이 짝꿍처럼 보이지요?
setup.py 수정
파이썬 파일을
ros2 run으로 실행하기 위해서 패키지 내 setup.py 파일에 entry_points를 추가해 주어야 합니다.
entry_points={
'console_scripts': [
'example_node_1 = py_node_tutorial.node_example_1:main',
'example_node_2 = py_node_tutorial.node_example_2:main',
'example_node_3 = py_node_tutorial.node_example_3:main',
'example_node_4 = py_node_tutorial.node_example_4:main',
'example_node_5 = py_node_tutorial.node_example_5:main',
],
},
작성하는 방법은 다음과 같습니다. ⇒ 실행 시 사용될 이름 = <패키지 이름>.<파일 이름>.main
example 2 - timer
- 로봇은 실행된 이후 계속해서 작업을 수행해야 하기에 주기적으로 무언가를 실행하는 일이 잦습니다. 이를 구현하는 Timer를 살펴봅시다.
$ ros2 run py_node_tutorial example_node_2
==== Hello ROS 2 : 1====
==== Hello ROS 2 : 2====
==== Hello ROS 2 : 3====
==== Hello ROS 2 : 4====
==== Hello ROS 2 : 5====
- main문에 추가된 create_timer와 timer_callback 함수를 확인할 수 있습니다.
def timer_callback():
"""Timer will run this function periodically."""
global count
count += 1
print(f'==== Hello ROS 2 : {count}====')
def main(args=None):
"""Do enter into this main function first."""
rclpy.init(args=args)
node = Node('node_name')
node.create_timer(0.2, timer_callback)
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
timer를 생성하기 위해서 create_timer 함수가 사용됩니다.
- timer_period_sec : 실행 주기 (초)
- callback : 해당 주기마다 실행될 함수
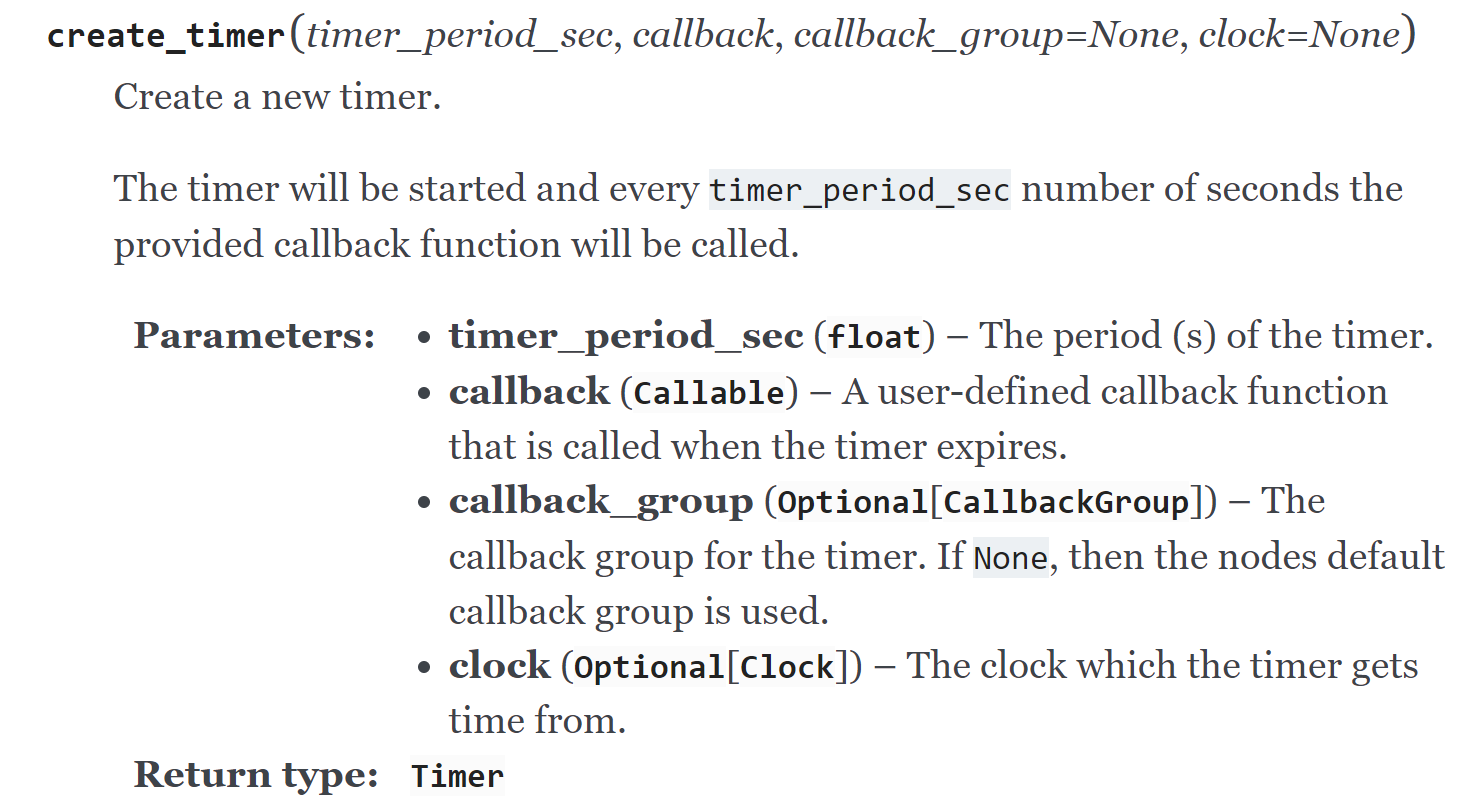
image from : docs.ros2.org
example 3 - spin_once, spin
Node의 상태를 살피면서 반복 실행시키는 spin 함수에 대해 좀 더 자세하게 살펴봅니다.
- 예제 실행
$ ros2 run py_node_tutorial example_node_3
==== Hello ROS 2 : 1====
==== Hello ROS 2 : 2====
==== Hello ROS 2 : 3====
...
- 주요 코드를 분석해 보겠습니다.
Node는 상태를 지속 유지하면서 변경된 내용에 따라 지정된 동작을 수행해야 합니다. 이는 로봇 프로그램에서 매우 보편적인 작업으로, ROS 2에서는 **spin()**이라는 이름의 함수로 기능을 제공하고 있습니다.
def main(args=None):
"""Do enter into this main function first."""
rclpy.init(args=args)
node = Node('node_name')
node.create_timer(0.2, timer_callback)
while True:
rclpy.spin_once(node, timeout_sec=10)
node.destroy_node()
rclpy.shutdown()
spin을 비롯하여 spin_once, spin_until_future_complete와 같이 프로그램의 실행을 관리하기 위한 다양한 추가 함수들이 존재합니다.
- timer_callback과 OOP의 필요성
def timer_callback():
"""Timer will run this function periodically."""
global count
count += 1
print(f'==== Hello ROS 2 : {count}====')
# How can I use logger without globalization ?
# node.get_logger().info('\n==== Hello ROS 2 ====')
callback 함수가 사용되면 필연적으로 두 함수 간 공유되는 count와 같은 자원이 생기며, 이 count를 다루면서 예기치 못한 실수가 발생할 수 있습니다.
지금은 모두 전역 변수로 작업하고 있었는데, 이것을 어떻게 효율적으로 처리할 수 있을까요?
example 4 - OOP Node
- 예제 실행의 결과는 이전과 같습니다. 하지만 구현에서 차이를 갖습니다.
$ ros2 run py_node_tutorial example_node_5
[INFO] [1657348011.971419700] [composition_example_node]: ==== Hello ROS 2 : 1====
[INFO] [1657348012.163466100] [composition_example_node]: ==== Hello ROS 2 : 2====
[INFO] [1657348012.363590700] [composition_example_node]: ==== Hello ROS 2 : 3====
- class를 사용하여 Node를 구현한 모습을 확인할 수 있습니다.
class NodeClass(Node):
"""Second Node Class.
Just print log periodically.
"""
def __init__(self):
"""Node Initialization.
You must type name of the node in inheritanced initializer.
"""
super().__init__('composition_example_node')
self.create_timer(0.2, self.timer_callback)
self._count = 1
def timer_callback(self):
"""Timer will run this function periodically."""
self.get_logger().info(f'==== Hello ROS 2 : {self._count}====')
self._count += 1
ROS 1과 달리, ROS 2의 OOP 구현은 Node를 상속받습니다. (때문에 생성 시, Node이름을 super().__init__()안에 넣어주어야 합니다.)
이렇게 객체지향을 사용하면 Node의 기능들을 적극 활용하여 더욱 쉽고 강력한 ROS 2 개발이 가능해집니다. 앞으로의 예시에서는 모두 객체 지향을 사용하겠습니다.
- rclpy logger
super().__init__('node_name')
...
node.get_logger().info('\n==== Hello ROS 2 ====')
rospy.loginfo()와 같이 rclpy에서도 get_logger라는 logging API를 제공합니다. 다만, rclpy의 logger는 Node에 종속되는 개념입니다. (ROS 2에서는 여러 Node가 하나의 프로세스 안에서 실행될 수 있기 때문입니다.)
get_logger()를 사용하면 일반적인 print 콘솔 출력과는 달리, 실행중인 Node이름, 시간, 위험성 등을 디버깅할 수 있어 이후 복잡한 시스템에서 큰 도움이 됩니다.
example 5 - Logger Level
- 기본 node 프로그래밍의 마지막 예시입니다.
$ ros2 run py_node_tutorial example_node_5
[INFO] [1657348108.163389800] [node_name]: ==== Hello ROS 2 : 1====
[WARN] [1657348108.163810900] [node_name]: ==== Hello ROS 2 : 1====
[ERROR] [1657348108.164126200] [node_name]: ==== Hello ROS 2 : 1====
[FATAL] [1657348108.164514300] [node_name]: ==== Hello ROS 2 : 1====
...
ROS 1에서와 유사하게 ROS 2에서도 위험도에 따라서 다른 logger level을 적용할 수 있습니다.
info를 기준으로 아래로 갈수록 높은 레벨의 log이며, 제일 심각한 error와 fatal의 경우, 콘솔 출력시에도 빨간 글씨로 보이는 것을 확인할 수 있습니다.
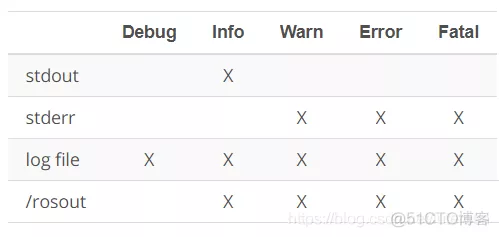
- image from : 51CTO
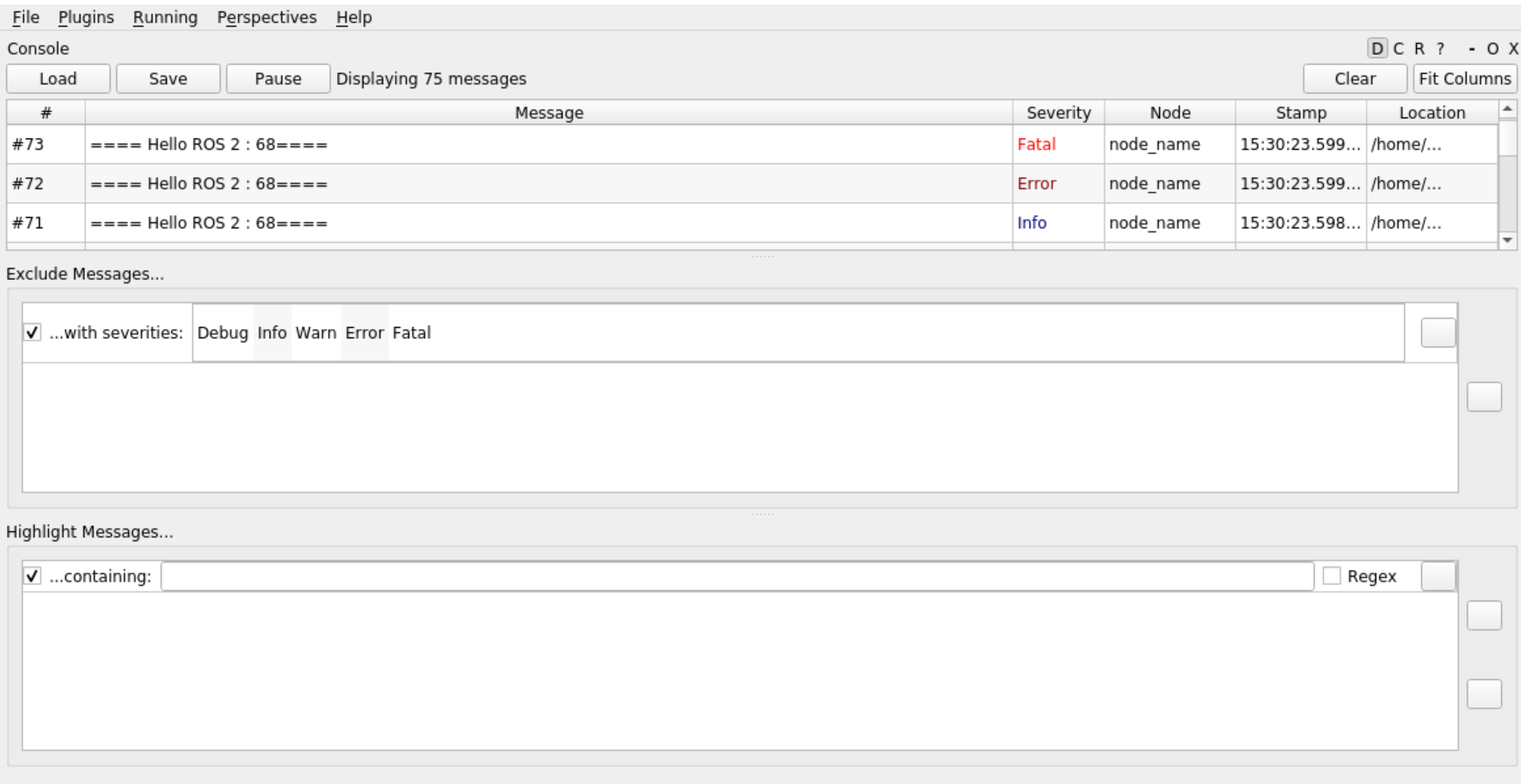
debug의 경우 실제 콘솔 출력으로는 나타나지 않으며, 효과적인 Tracking을 위해 ROS 1 강의에서 배운 rqt console 사용을 권장합니다.
ROS 2 Parameter
ROS 1에서와 마찬가지로, ROS 2에서도 각종 매개변수를 다룰 수 있는 커멘드 명령어와 코드 API를 제공합니다.
- 예제 Package 빌드와 실행
$ colcon build --packages-select py_param_tutorial
$ source install/local_setup.bash
$ ros2 run py_param_tutorial param_example
[INFO] [1672390971.030532687] [param_ex_node]:
string_param: world
int_param: 119
float_param: 3.1415
arr_param: [1, 2, 3]
nested_param.string_param: Wee Woo
param_ex_node에서 5종류의 매개변수가 선언되었습니다. 이들을 확인하는 커멘드 라인을 배워봅시다.
- ros2 param list
$ ros2 param list
/param_ex_node:
arr_param
float_param
int_param
nested_param.string_param
string_param
use_sim_time
- ros2 param get/set - node 이름과 매개변수 이름을 모두 필요로 함에 주의합니다.
$ ros2 param get /param_ex_node arr_param
Integer values are: array('q', [1, 2, 3])
$ ros2 param set /param_ex_node arr_param '[1,2,3,4]'
Set parameter successful
$ ros2 param get /param_ex_node arr_param
Integer values are: array('q', [1, 2, 3, 4])
이제, 파이썬 코드를 분석해봅시다.
- parameter의 생성은 node 내에서 이루어지며, declare_parameter를 통해 생성합니다. 함수의 두번째 인자는 기본값입니다.
nested_param과 같이, parameter는 계층 구조를 가질 수 있으며 . 을 통해 구분할 수 있습니다. string_param이라는 이름을 가진 parameter가 두 종류 존재하지만 서로 소속된 계층이 달라 공존할 수 있는 것입니다.
class ParamExNode(rclpy.node.Node):
def __init__(self):
super().__init__('param_ex_node')
self.declare_parameter('string_param', 'world')
self.declare_parameter('int_param', 119)
self.declare_parameter('float_param', 3.1415)
self.declare_parameter('arr_param', [1,2,3])
self.declare_parameter('nested_param.string_param', 'Wee Woo')
- 선언된 매개변수의 값은 get_parameter를 통해 확인 가능합니다. get_parameter 자체는 Object이고, value 속성이 실제 값을 갖고 있습니다.
string_param = self.get_parameter('string_param')
int_param = self.get_parameter('int_param')
float_param = self.get_parameter('float_param')
arr_param = self.get_parameter('arr_param')
nested_param = self.get_parameter('nested_param.string_param')
self.get_logger().info(f"\nstring_param: {string_param.value} \
\nint_param: {int_param.value} \
\nfloat_param: {float_param.value} \
\narr_param: {arr_param.value} \
\nnested_param.string_param: {nested_param.value}"
)
- parameter는 launch file에서도 설정할 수 있습니다. - Hello, 112로 변경된 값을 확인해봅시다.
$ ros2 launch py_param_tutorial launch_with_param.launch.py
...
[param_example-1] [INFO] [1672387864.135213913] [param_example]:
[param_example-1] string_param: Hello
[param_example-1] int_param: 112
[param_example-1] float_param: 3.1415
[param_example-1] arr_param: [1, 2, 3]
- launch file의 parameters 옵션을 사용하여 이러한 작업이 가능합니다.
def generate_launch_description():
param_ex_node = Node(
package='py_param_tutorial',
executable='param_example',
name='param_example',
output='screen',
parameters=[
{'string_param': 'Hello'},
{'int_param': 112},
],
)
- parameter가 매우 많은 경우에는 ROS 1에서와 같이 yaml 파일을 사용해 관리할 수 있습니다. launch file의 주석된 부분을 해제하고 다시 실행해봅시다.
config = os.path.join(
get_package_share_directory('py_param_tutorial'), 'config', 'params.yaml'
)
param_ex_node = Node(
package = 'py_param_tutorial',
executable = 'param_example',
name = 'param_example',
output='screen',
parameters = [config]
)
모든 매개변수들이 변경된 것을 확인 가능합니다.
$ ros2 launch py_param_tutorial launch_with_param.launch.py
...
[param_example-1] [INFO] [1672391557.995024614] [param_example]:
[param_example-1] string_param: Yaml Yaml
[param_example-1] int_param: 5
[param_example-1] float_param: 3.14
[param_example-1] arr_param: ['I', 'love', 'ROS 2']
[param_example-1] nested_param.string_param: Ooh Wee
- yaml 파일은 config/params.yaml에 위치하고 있습니다. parameter 관리 용도로 사용하기 위해서 yaml 파일은 일정한 규칙을 갖춰야 합니다.
param_example:
ros__parameters:
string_param: "Yaml Yaml"
int_param: 5
float_param: 3.14
arr_param: ['I', 'love', 'ROS 2']
nested_param:
string_param: "Ooh Wee"
<node-name>:
ros__parameters:
<param-name>: <param-value>
...
<nested-layer-name>:
<param-name>: <param-value>
- 이렇게 새로운 폴더와 파일을 추가한 경우, python 패키지의 setup.py를 수정해주어야 하며 패키지 빌드도 새로 해주어야 합니다.
import os
from glob import glob
from setuptools import setup
package_name = 'py_param_tutorial'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'config'), glob('config/*.yaml')),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
],
- launch file에 추가된 내용을 다시 살펴보면, 방금 전의 yaml 파일을 불러와서 node의 실행 option에 전달하고 있습니다.
config = os.path.join(
get_package_share_directory('py_param_tutorial'), 'config', 'params.yaml'
)
param_ex_node = Node(
package = 'py_param_tutorial',
executable = 'param_example',
name = 'param_example',
output='screen',
parameters = [config]
)
아래 예시에서 보이듯이 로봇의 초기 속도, 최대/최소 값들, 하드웨어와 관련된 튜닝값 등 수많은 매개변수들이 사용되며 모두 지금 배운 parameter를 사용하게 됩니다.
https://github.com/ros-planning/navigation2/blob/main/nav2_bt_navigator/src/bt_navigator.cpp