Lecture5 - ROS 2 Topic and Examples
Topic에 대해 배워보기 전에, 실습 시스템을 구축해봅시다.
SRC Gazebo
이번 ROS 2 강의의 실습들은 Road Balance의 차량형 로봇 SRC를 통해 진행하고자 합니다. 실습을 진행하기 전 Gazebo 환경을 함께 세팅해보겠습니다.
- src_gazebo 실행 세팅 - 다소 번거로운 작업이므로 gif를 보시면서 차근차근 잘 따라와주세요!
cd ~/ros2_ws/src/du2023-ros2
./setup_scripts.sh
# CMakeLists.txt 수정 (주석)
colcon build --packages-select src_gazebo
source install/local_setup.bash
# CMakeLists.txt 수정 (주석 해제)
colcon build --packages-select src_gazebo
colcon build --packages-select src_odometry
colcon build --packages-select src_controller
source install/local_setup.bash
- empty world 실행
ros2 launch src_gazebo empty_world.launch.py
- 빈 gazebo 환경에 차량형 로봇이 등장할 것입니다. 함께 등장하는 rqt_robot_steering을 통해 로봇을 움직여보세요.
- 실행 중 발생할 수 있는 오류와 해결방법을 제시드립니다. 아래와 같은 에러 발생 시
sudo apt dist-upgrade를 입력하면 됩니다.

로봇에 부착되어 있는 센서 데이터들과 제어 데이터를 ros2 topic list로 확인해봅시다.
- /cmd_vel : Twist msg를 통해 로봇을 제어하는 topic
- /imu/data : imu 데이터
- /scan : 2D lidar
- /logi_camera_sensor/image_raw : 전방 카메라 데이터
ROS 2 Topic
강의를 열심히 따라오면서 ROS 개념을 잊어버렸을 수도 있으므로 간단히 개념 복습을 해보겠습니다.
- Topic은 Node들 사이에 데이터(Message)가 오가는 길(Bus)의 이름이며, 적절한 이름으로 데이터를 송수신하지 않으면 원하는 동작을 수행할 수 없습니다.
image from : docs.ros.org
- Topic의 중요한 특징으로 Topic은 여러 Node들로부터 데이터를 받을 수 있고, 전송 시에도 여러 Node들에게 전송이 가능한 방식입니다.
- image from : docs.ros.org
topic을 통해 데이터가 전달되는 과정은 다음과 같습니다.
- 데이터를 보내는 주체인 publisher는 topic을 통해 원하는 정보를 subscriber에게 전달합니다. 이것을 topic publish라고 부르지요.
- 반대로, 데이터를 받는 주체인 subscriber 입장에선 topic을 통해 데이터를 받게 되며 이것은 topic subscribe라고 불립니다.
ROS 2 Topic msg
로봇 프로그래밍 시 센서, 제어 데이터를 비롯하여 다양한 유형의 데이터들이 Topic을 통해 오고 갑니다. ROS에서는 이러한 데이터 형식을 msg - Message라는 형태로 제공하며, 원하는 데이터에 적합한 topic msg를 사용하면 더욱 효율적인 로봇 프로그래밍이 가능해집니다.
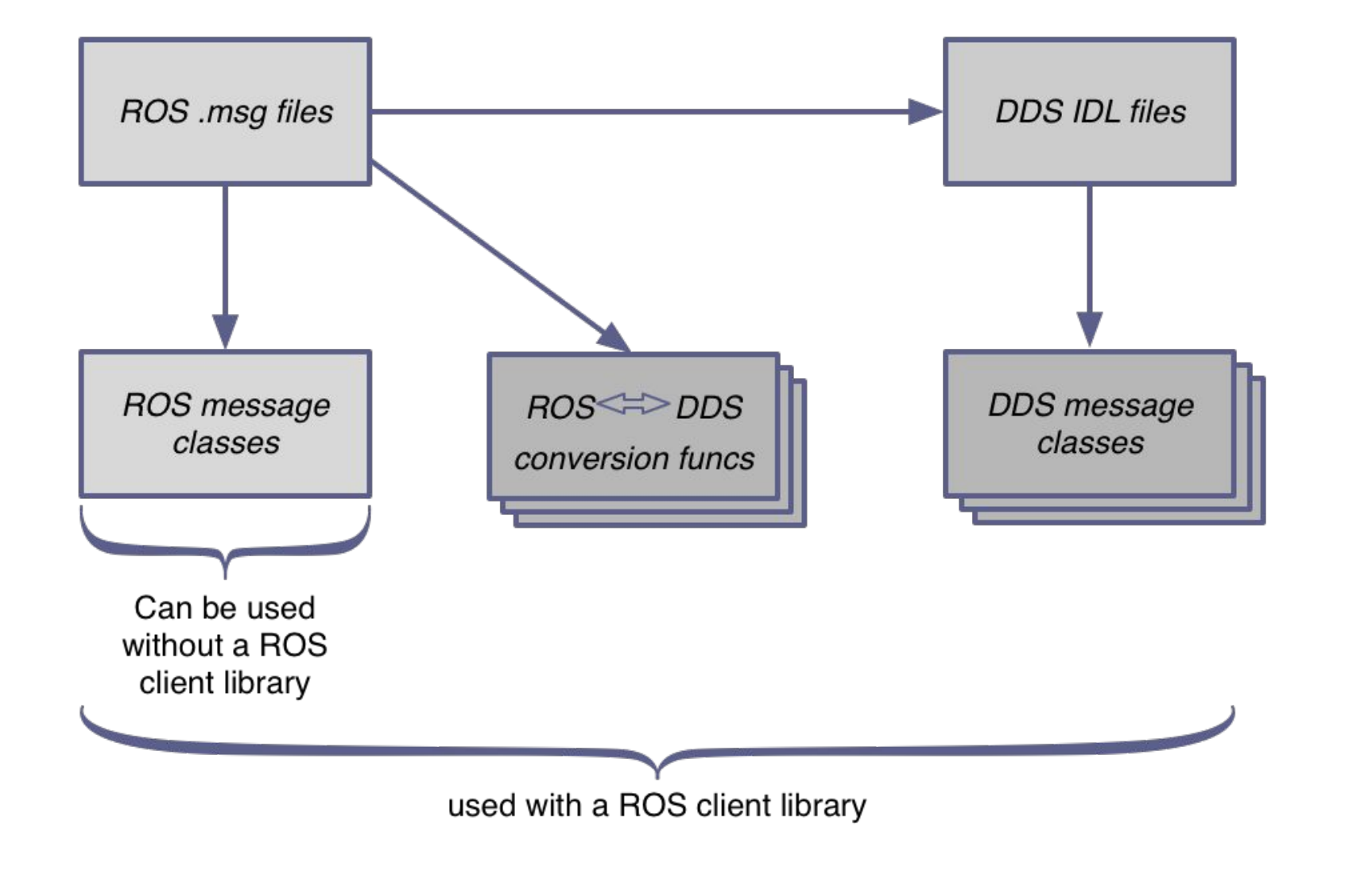
- image from : ethz.ch
geometry_msgs/Twist와 같은 message는 ROS 2에서도 동일하게 사용할 수 있습니다. 다만, ROS 2에서는 msg/srv/action 과 같이 필드의 구분이 하나 더 추가됩니다.
- ROS 1 : geometry_msgs/Twist
- ROS 2 : geometry_msgs/msg/Twist
- 출처 : http://docs.ros.org/
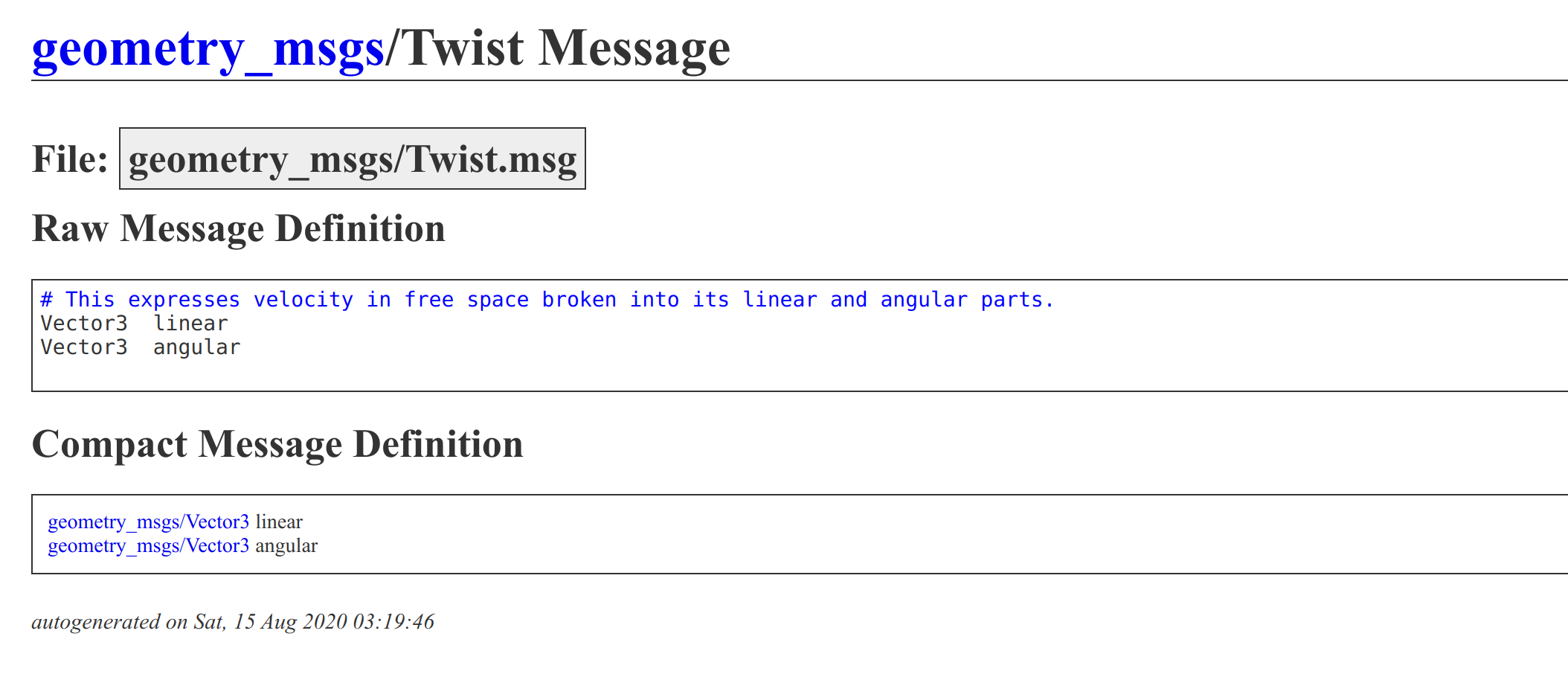
특정 message가 어떻게 구성되어 있는지 알고 싶을 때는 다음과 같은 커멘드 라인을 사용합니다.
$ ros2 interface show geometry_msgs/msg/Twist
# This expresses velocity in free space broken into its linear and angular parts.
Vector3 linear
Vector3 angular
혹은 앞서 제가 살펴본 것 처럼 검색을 해 보아도 됩니다.
ROS 2로 넘어오면서, topic 커멘드들은 다음과 같이 살짝 바뀌었습니다.
- rostopic list ⇒ ros2 topic list
- rostopic info ⇒ ros2 topic info
- rostopic echo ⇒ ros2 topic echo
ROS 2 Topic Tools
ROS 2에서도 GUI툴 RQT를 사용할 수 있습니다. Topic과 관련된 rqt tools들을 사용해봅시다.
ROS 1과 ROS 2의 rqt는 다른 프로그램이며 ROS 1의 plugin과 ROS 2의 plugin이 완전 동일하지는 않습니다.
- 실습을 위해 gazebo와 rqt를 실행합니다.
# Terminal 1
ros2 launch src_gazebo empty_world.launch.py
# Terminal 2
rqt
-
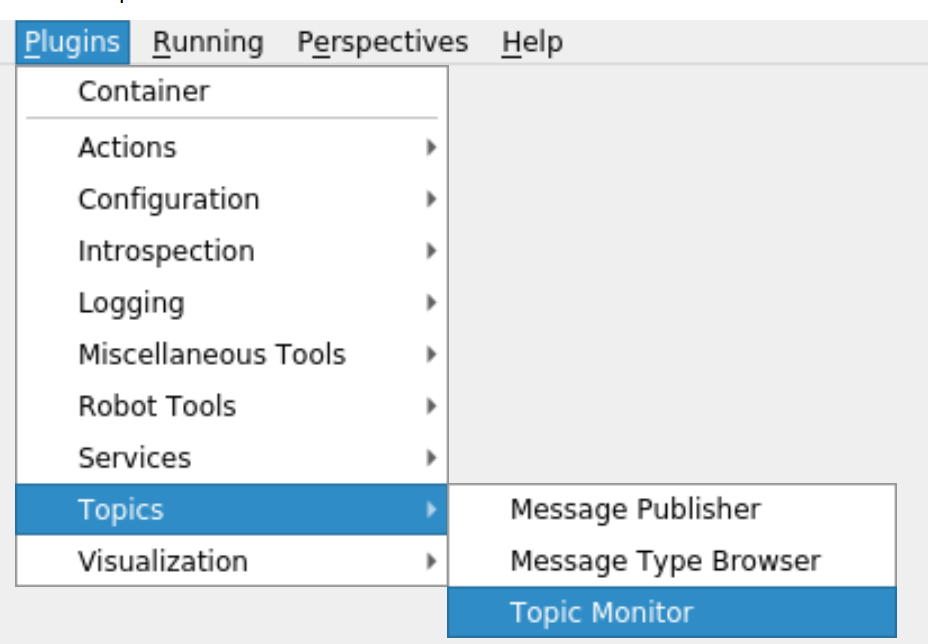
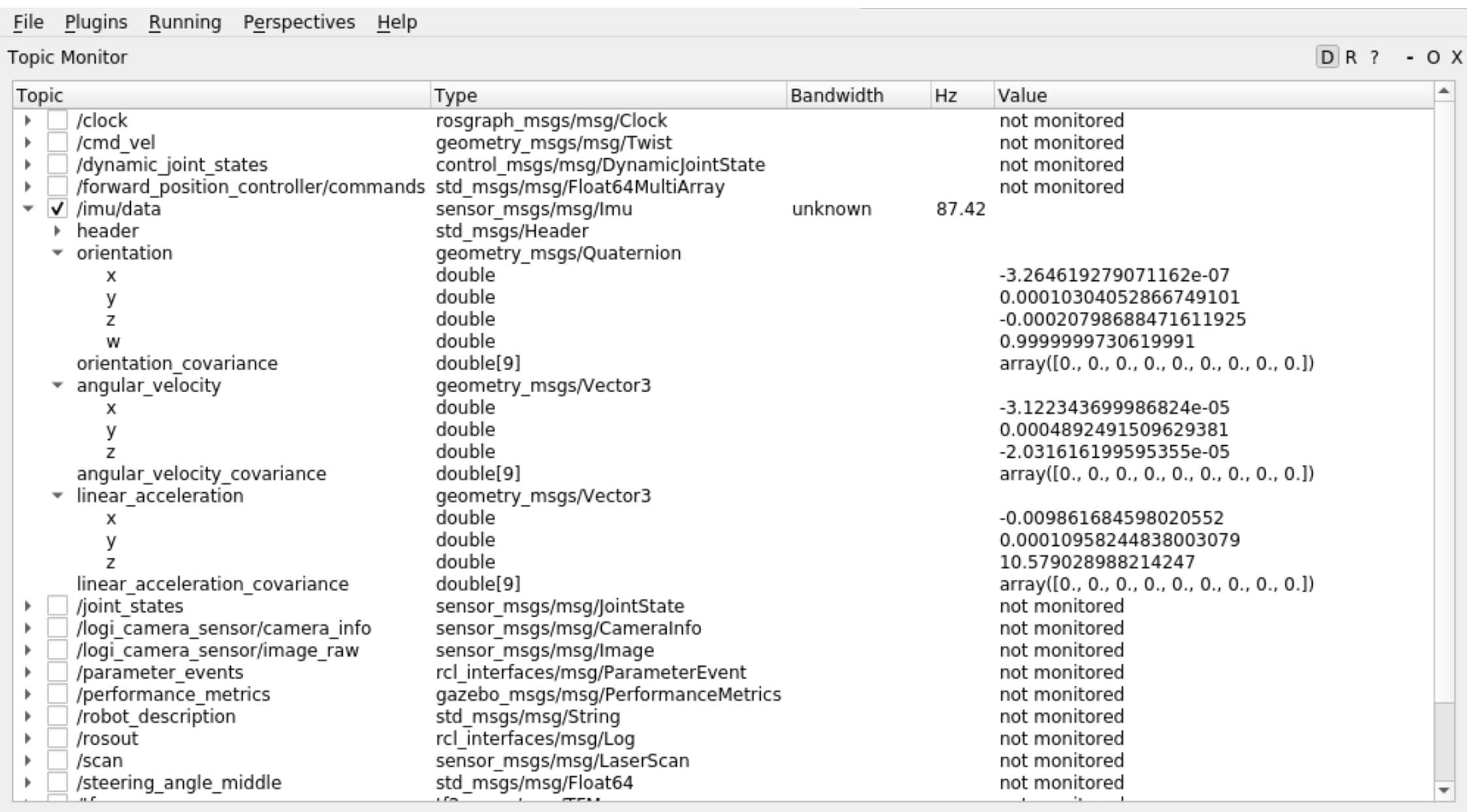
rqt 상단의 메뉴바에서 Plugins ⇒ Topics ⇒ Topic Monitor를 클릭합니다.
-
topic monitor를 통해 현재 오가고 있는 topic들을 한눈에 볼 수 있습니다.
-
이번에는 rqt 상단의 메뉴바에서 Plugins ⇒ Topics ⇒ Message Publisher를 클릭하고, + 버튼을 눌러 publish를 원하는 topic을 추가합니다.
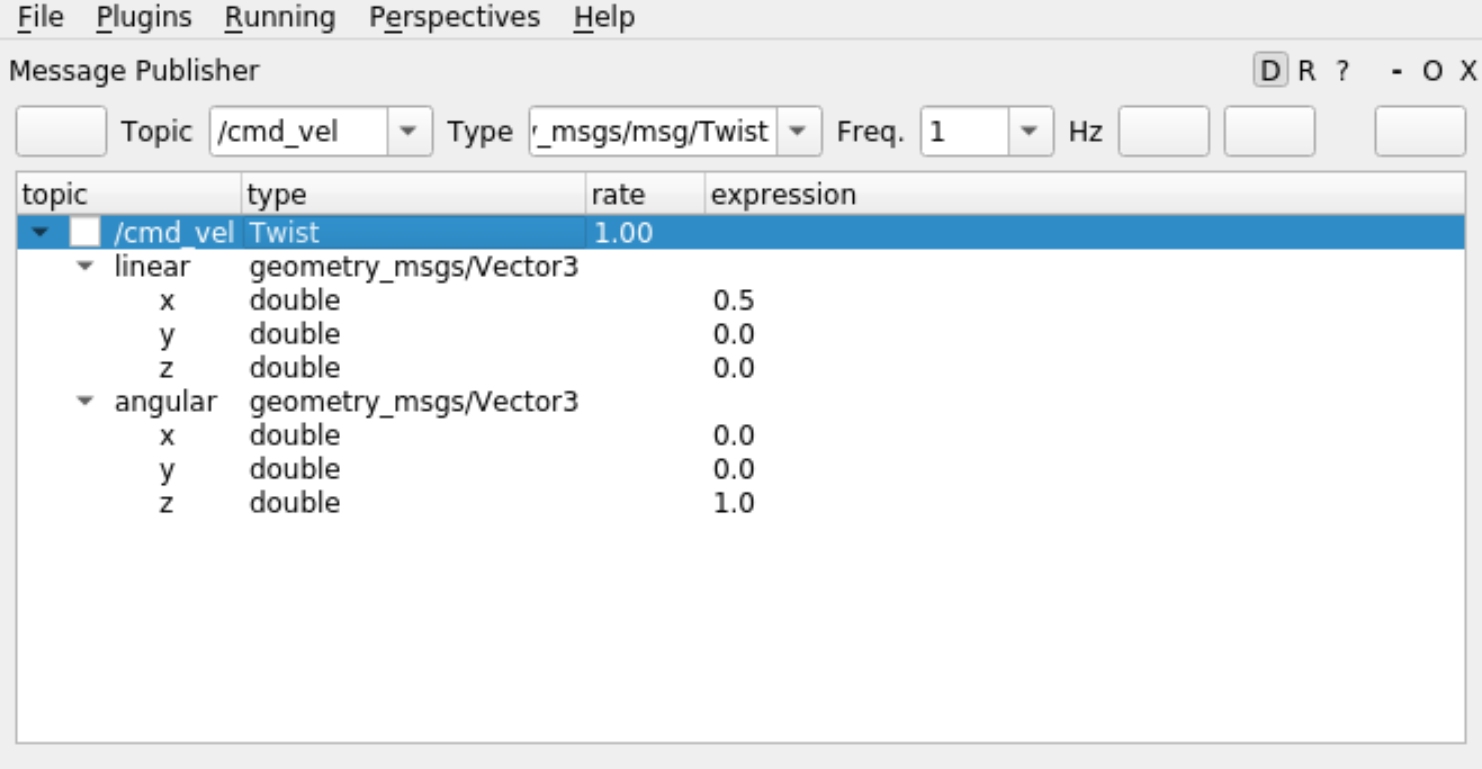
- Topic Publisher는 별도의 작업 없이 msg에 원하는 값을 채워 topic publish가 가능하게 해주는 툴입니다. 최종 publish를 위해 체크박스를 클릭하고, 원하는 값을 채워넣습니다.
ROS Bridge
강의노트를 작성하고 있는 2023년 지금도 ROS 1으로 개발된 시스템에 종속성을 가진 기업들과 프로젝트들이 많습니다. ROS 1과 ROS 2를 같이 사용할 수는 없을까요? ros1 bridge를 실습해봅시다.
- 일전, ROS 1에서 사용하던 smb gazebo를 오랜만에 실행시켜봅시다.
roslaunch smb_gazebo smb_gazebo.launch

- ros1 bridge를 통해 ROS 2 시스템에서 로봇을 제어해보겠습니다. 새로운 터미널을 열고, 초기 옵션 선택 시 3번을 선택하면 ros1 bridge가 실행됩니다. (이 동작은 사실 dynamic_bridge를 실행시키는 것입니다.)
sudo apt install ros-foxy-ros1-bridge -y
# Terminal 1 - ros bridge
ros2 run ros1_bridge dynamic_bridge
# Terminal 2 - ros2 foxy
ros2 run teleop_twist_keyboard teleop_twist_keyboard
- ROS 2로 설정된 터미널에서 ROS 1으로 구동되고 있는 로봇을 조종할 수 있습니다.
- ros bridge가 있으니 ROS 2 개발을 굳이 하지 않아도 된다고 생각할 수 있습니다. 하지만 보안, 지연과 같은 ROS 1의 고질적인 문제들은 여전히 남아있게 되므로 프로젝트를 시작하는 단계라면, ROS 2로 모든 개발을 진행하시길 추천드립니다.
- image from : swri.org
참고로, /opt/ros/<ros-version>/setup.bash는 ROS 시스템을 사용하기 위해서 필요한 설정이 담긴 파일입니다. 혹여나 galactic, humble과 같이 최신 버전을 사용하고 싶을 때 참고하시기 바랍니다.
ROS 1과 ROS 2를 모두 관리하기에는 많은 노력이 필요하고, 원하는 기능이 모두 동작하지 않을 수 있습니다. 이전 버전 legacy가 있는 경우, 잘 판단하여 시스템을 유지/보수합시다.
My Gazebo World
Topic의 응용으로 Gazebo를 사용하여 나만의 장애물을 만들고, 충돌을 회피하는 코드를 작성해보고자 합니다. 이를 위해 Gazebo의 Building Editor 사용법을 알려드리겠습니다.
- gazebo를 실행시킨 뒤, 상단 Edit 옵션에서 Building Editor를 실행합니다.
- 상단 모눈종이에 스케치를 통해 건물 벽을 생성할 수 있으며, 하단 view를 통해 실시간으로 업데이트되는 건물을 확인할 수 있습니다. 혹여 실수를 했거나, 보다 정확한 수치를 입력하고 싶은 경우, 모눈종이 위의 검은 선을 더블 클릭하면 사진과 같이 구체적인 설정을 변경할 수 있는 탭이 등장합니다.
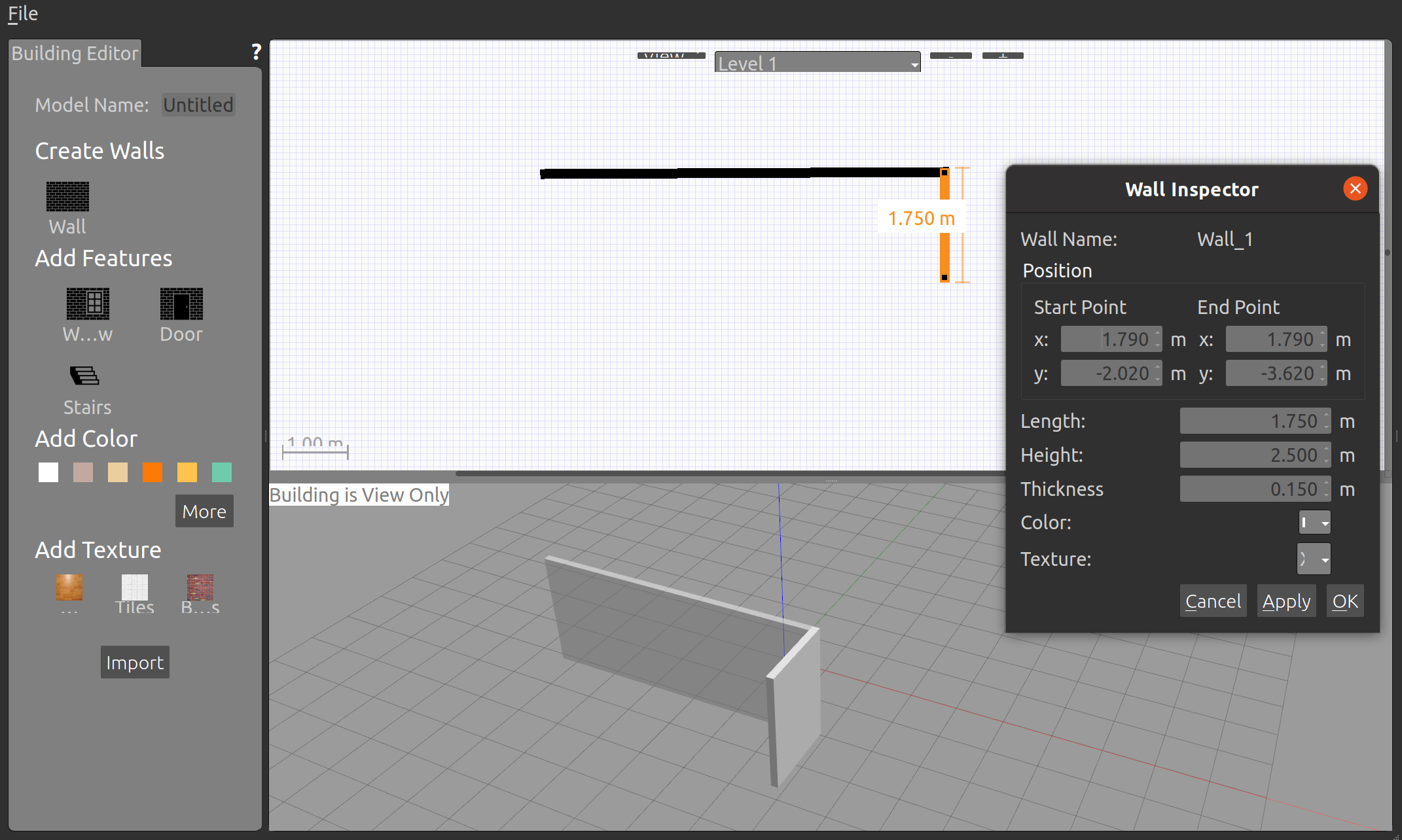
- 수정이 완료되었다면, 왼쪽 탭에서 door, stairs도 사용해보고, Texture도 입혀봅시다.
- 모든 작업을 마친 뒤, File 탭에서 Save As를 선택하여 완성한 물체를 저장합니다. (저는 wall 이라는 이름으로 저장해보겠습니다.)
- 저장된 폴더 내부는 다음과 같은 구조를 갖게 됩니다.
├─ wall
├── model.config
└── model.sdf
- model.config : 해당 model의 이름, 작성자 등 기본적인 정보들이 기입됩니다.
- model.sdf : 실직적인 sdf 형식의 모델이 위치합니다.
작성한 물체를 Gazebo에서 두고두고 사용하는 몇가지 방법들이 있습니다.
- GAZEBO_MODEL_PATH에 추가하기 ⇒ ~/.gazebo/gui.ini 파일 내 model_paths에 building 폴더에 절대 경로를 추가합니다.
$ gedit ~/.gazebo/gui.ini
[geometry]
x=0
y=0
[model_paths]
filenames=/home/kimsooyoung/<your-folder-location>
- launch file에서 GAZEBO_MODEL_PATH 수정하기 ⇒ 대신 이렇게 하면 해당 launch file 사용 시에만 GAZEBO_MODEL_PATH가 반영됩니다.
if 'GAZEBO_MODEL_PATH' in os.environ:
os.environ['GAZEBO_MODEL_PATH'] += ":" + gazebo_model_path
else:
os.environ['GAZEBO_MODEL_PATH'] = gazebo_model_path
-
이제 Gazebo를 실행시키면, 사진과 같이 Insert 부분에 building이 추가되어있음을 확인 가능합니다. 이를 클릭 후 gazebo 환경으로 커서를 옮기면 원하는 위치에 wall을 위치시킬 수 있습니다.
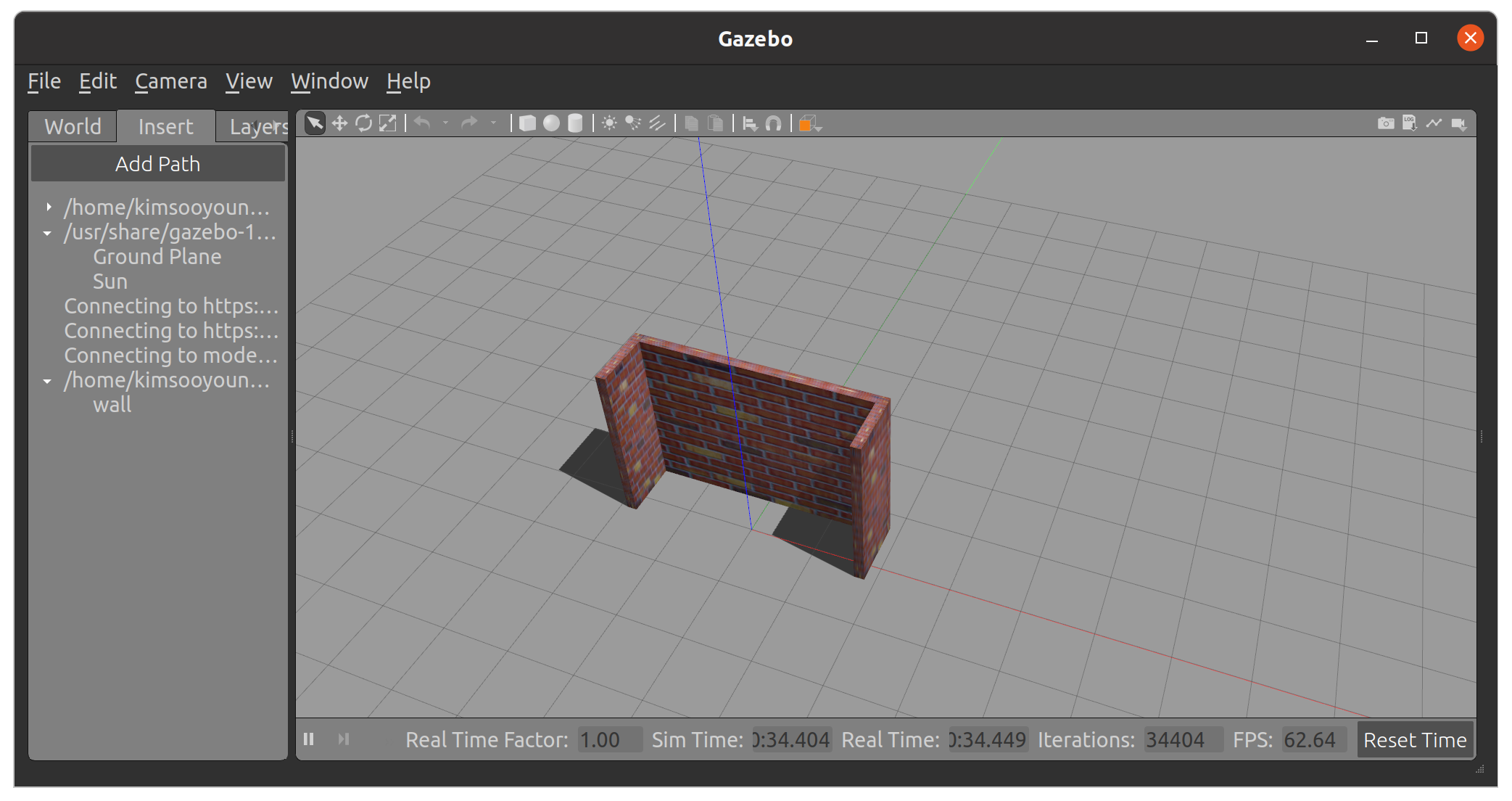
-
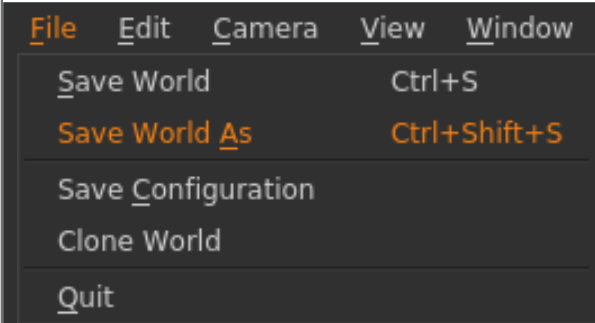
wall이 추가된 world는 별도로 저장해줘야 합니다. File ⇒ Save World As를 클릭하면 완성된 world 파일을 저장합시다.
생성한 world 파일을 launch 파일로 실행해봅시다.
-
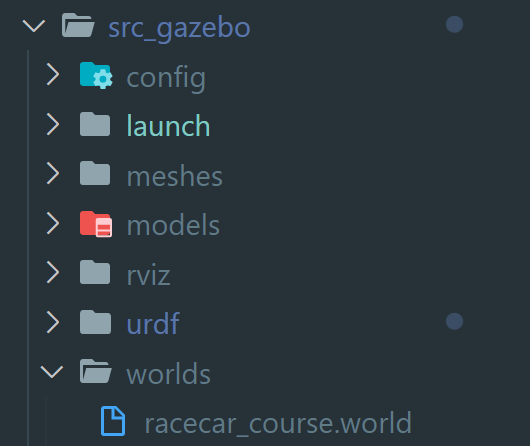
저장해두었던 Gazebo world 파일을 src_gazebo의 worlds 폴더에 위치시킵니다.
-
launch 파일을 수정하여 새로운 world 파일의 위치를 전달합니다.
def generate_launch_description():
...
# gazebo
pkg_gazebo_ros = FindPackageShare(package='gazebo_ros').find('gazebo_ros')
pkg_path = os.path.join(get_package_share_directory('src_gazebo'))
world_path = os.path.join(pkg_path, 'worlds', '여러분의-world-file.world')
...
# Start Gazebo server
start_gazebo_server_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(pkg_gazebo_ros, 'launch', 'gzserver.launch.py')),
launch_arguments={'world': world_path}.items()
)
- package를 빌드하고, gazebo를 다시 실행해봅시다.
colcon build --packages-select src_gazebo
source install/local_setup.bash
ros2 launch src_gazebo empty_world.launch.py
- 제작한 world와 로봇이 함께 등장하는 것을 확인할 수 있습니다.
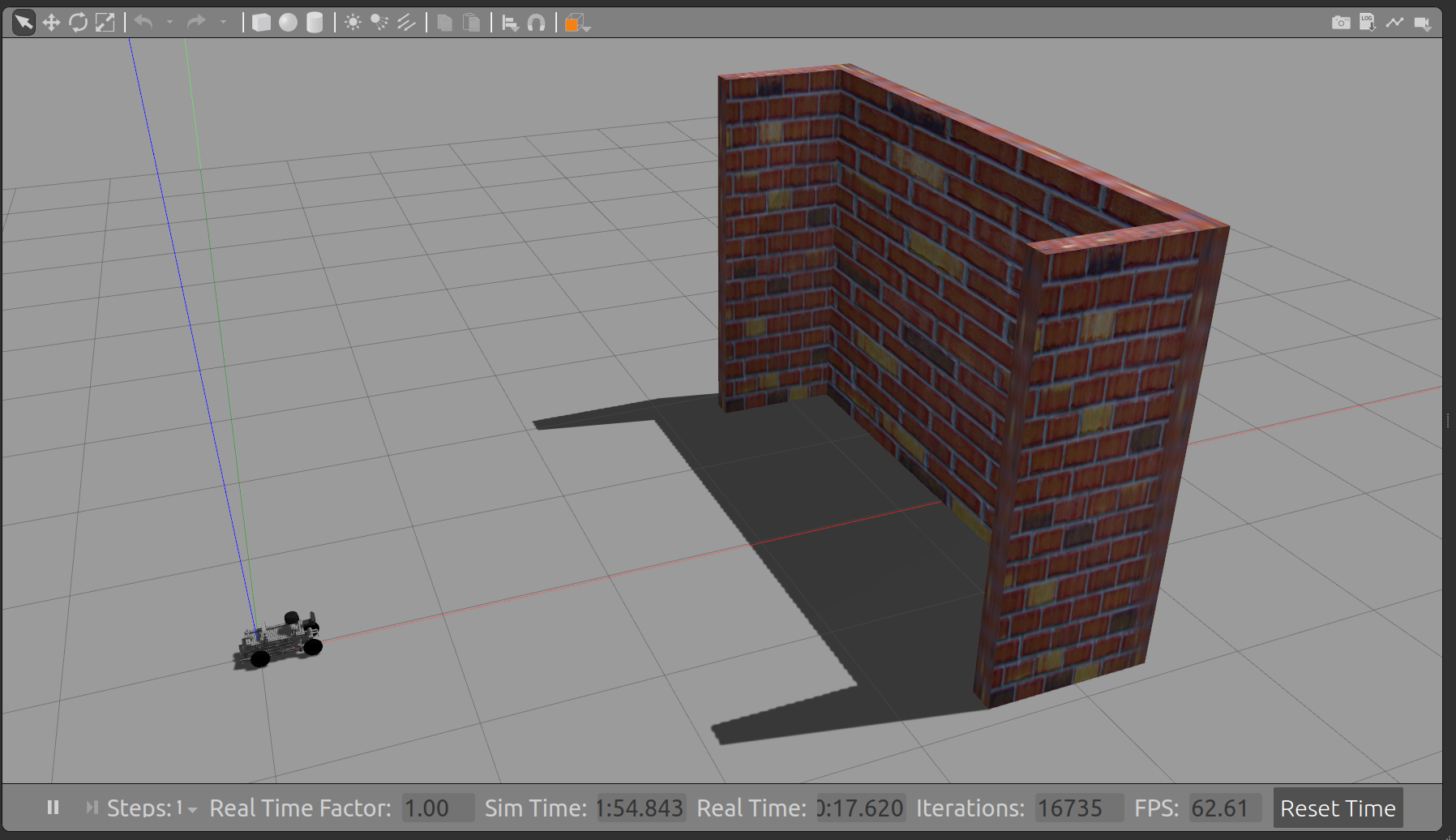
최대한 여러분들만의 장애물을 만들어보시고, 혹시나 이 과정에서 도저히 모르겠는 오류가 발생했거나, 시간이 없는 경우, 우선 제가 제작한 world와 launch file을 사용하도록 합니다. ⇒ ros2 launch src_gazebo wall_world.launch.py
ROS 2 Topic 프로그래밍
example1 - cmd_vel publish
- 준비된 예시를 우선 실행해봅시다.
# Terminal 1
ros2 launch src_gazebo empty_world.launch.py
# Terminal 2
cd ~/ros2_ws
colcon build --packages-select py_topic_tutorial
source install/local_setup.bash
ros2 run py_topic_tutorial topic_pub_node
- 로봇이 원을 그리며 움직이기 시작합니다. ROS 1 강의를 완료하였다면 어떻게 구현하였을지 아시겠지요?
- 코드를 살펴보겠습니다 - 시작으로, 필요한 파이썬 패키지들을 import 합니다. ROS 2에서 파이썬 프로그래밍을 하기 위해서는 rclpy를 import 해야 합니다. 더불어, Twist를 import하는 문법도 눈여겨봅시다.
import random
from geometry_msgs.msg import Twist
import rclpy
from rclpy.node import Node
- 핵심이 되는 TwistPubNode 클래스의 생성자부터 살펴보겠습니다.
class TwistPubNode(Node):
def __init__(self):
super().__init__('twist_pub_node')
self.get_logger().info(
f'TwistPubNode Created at {self.get_clock().now().to_msg().sec}'
)
# self.twist_publisher = self.create_publisher(Twist, "twist_topic", 10)
self.twist_publisher = self.create_publisher(Twist, '/cmd_vel', 10)
create_publisher는 topic publisher를 생성하는 함수로 3개의 매개변수를 받으며 각각에 대한 설명은 다음과 같습니다.
- message type : Topic 통신에 사용될 msg Type 입니다.
- topic name : 사용할 Topic 이름을 지정합니다. (이 이름을 잘못 설정하면 존재하지 않는 topic에 Publish하는 오류 상황이 발생하니 주의합니다.)
- queue_size : 대기열의 크기라고 이해하시면 좋습니다.
- timer callback에서 publish가 이루어집니다. 생성한 publisher에서 publish 함수를 사용하며 매개변수로 message가 전달됩니다.
...
self.create_timer(0.2, self.timer_callback)
def timer_callback(self):
"""Timer will run this function periodically."""
msg = Twist()
# Fill in msg with compatible values
msg.linear.x = 0.5
msg.angular.z = 1.0
self.twist_publisher.publish(msg)
example2 - scan subscription
- 이번 예시는 라이다 데이터를 다뤄보고자 합니다. 명령어를 실행해봅시다.
# Terminal 1
$ ros2 launch src_gazebo empty_world.launch.py
# Terminal 2
$ ros2 run py_topic_tutorial topic_sub_node
[INFO] [1672494602.141200628] [scan_sub_node]:
msg.ranges[0] : inf
msg.ranges[30] : inf
msg.ranges[60] : 0.7975894212722778
msg.ranges[90] : inf
msg.ranges[119] : inf
...
예시를 실행시킨 상황에서 Gazebo 상의 로봇 주변으로 물체를 등장시켜봅시다.
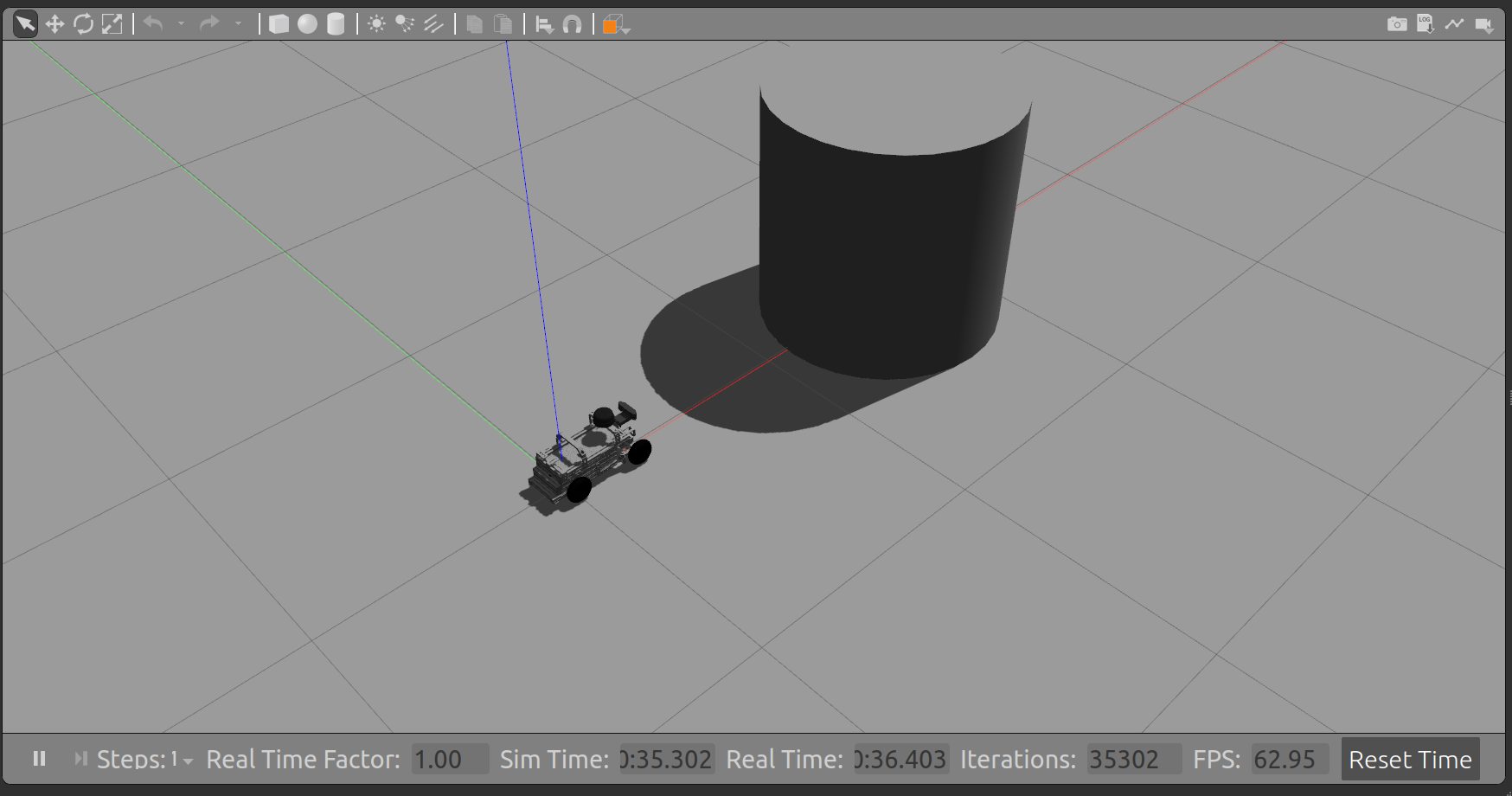
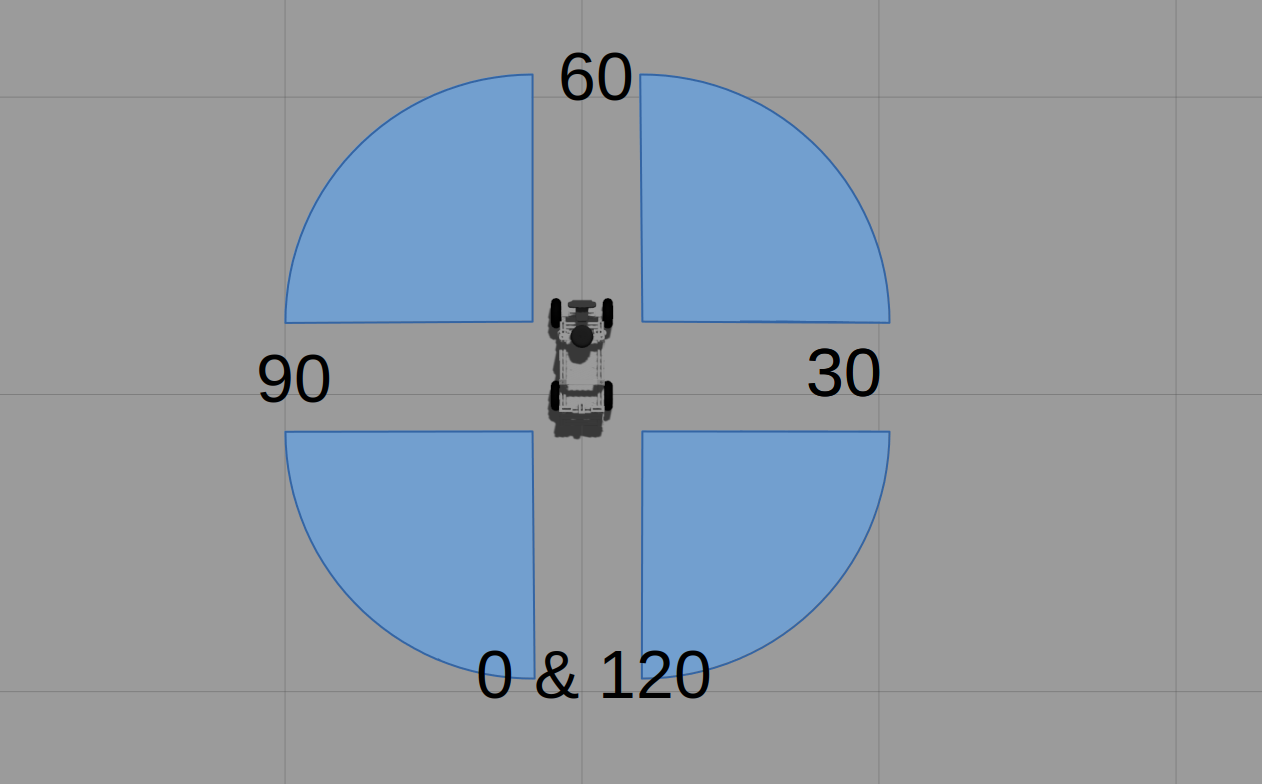
scan data의 ranges는 사진과 같은 거리 데이터를 담고 있답니다.
- 코드를 살펴봅시다. 이번에는 sensor_msgs/msg/LaserScan이 사용되었습니다.
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan
- ScanSubNode 클래스의 생성자에서는 scan topic의 subscriber가 생성됩니다.
class ScanSubNode(Node):
def __init__(self):
super().__init__('scan_sub_node')
queue_size = 10 # Queue Size
self.pose_subscriber = self.create_subscription(
LaserScan, 'scan', self.sub_callback, queue_size
)
create_subscription은 4개의 매개변수를 받으며 각각에 대한 설명은 다음과 같습니다.
- Message Type : Topic 통신에 사용될 msg Type 입니다.
- topic name : 데이터를 Subscribe할 Topic의 이름을 지정합니다. (이 이름을 잘못 설정하면 아무것도 publish하고 있지 않는 topic을 마냥 기다리고 있게 되는 상황이 발생할 것입니다.)
- subscribe callback : 데이터가 전달될 때마다 실행되는 callback 함수로, 전달된 데이터를 통해 실행할 작업이 이 함수 안에 구현됩니다.
- queue_size : create_publisher때와 마찬가지로, 대기열의 크기라고 이해하시면 좋습니다.
sub_callback의 첫번쨰 매개변수는 항상 topic message data가 됩니다. 해당 message에서 원하는 데이터만 추출한 다음, logger를 통해 콘솔 출력을 진행합니다.
def sub_callback(self, msg):
"""Timer will run this function periodically."""
self.get_logger().info(f' \
\nmsg.ranges[0] : {msg.ranges[0]} \
\nmsg.ranges[30] : {msg.ranges[30]} \
\nmsg.ranges[60] : {msg.ranges[60]} \
\nmsg.ranges[90] : {msg.ranges[90]} \
\nmsg.ranges[119] : {msg.ranges[119]} \
')
example3 - parking
- 이번 예시를 실행하기 전에, empty_world.launch.py를 수정해야 합니다.
# gazebo
pkg_gazebo_ros = FindPackageShare(package='gazebo_ros').find('gazebo_ros')
pkg_path = os.path.join(get_package_share_directory('src_gazebo'))
# world_path = os.path.join(pkg_path, 'worlds', 'empty_world.world')
world_path = os.path.join(pkg_path, 'worlds', 'wall_world.world')
- 물체와 충돌하기 전까지 로봇을 움직이다가 일정 거리 내 벽이 검출되면 자동으로 멈추는 예시입니다.
# Terminal 1
$ ros2 launch src_gazebo empty_world.launch.py
# Terminal 2
$ ros2 run py_topic_tutorial parking_node
...
[INFO] [1672563255.067421128] [parking_node]: Distance from Front Object : 0.6280616521835327
[INFO] [1672563255.173734128] [parking_node]: Distance from Front Object : 0.5546504259109497
[INFO] [1672563255.281276729] [parking_node]: Distance from Front Object : 0.5124648809432983
[INFO] [1672563255.389067729] [parking_node]: ==== Parking Done!!! ====
...
이 기능을 구현하기 위해서는 Topic Publish와 Subscribe가 모두 필요합니다.
- /cmd_vel topic publish
- /scan topic subscribe
⇒ 따라서, Node의 생성자에서도 Publisher와 Subscriber를 모두 생성합니다.
class ParkingNode(Node):
def __init__(self):
super().__init__('parking_node')
queue_size = 10 # Queue Size
self.twist_publisher = self.create_publisher(Twist, 'cmd_vel', queue_size)
self.scan_subscriber = self.create_subscription(
LaserScan, 'scan', self.sub_callback, queue_size
)
- sub_callback에서는 전방 (msg.ranges[60]) 물체와의 거리를 탐지하고, 이 거리가 0.5m 이하가 되면 정지 topic을 publish 합니다.
def sub_callback(self, msg):
twist_msg = Twist()
distance_forward = msg.ranges[60]
if distance_forward > 0.5:
self.get_logger().info(f'Distance from Front Object : {distance_forward}')
twist_msg.linear.x = 0.5
self.twist_publisher.publish(twist_msg)
else:
self.get_logger().info('==== Parking Done!!! ====\n')
twist_msg.linear.x = 0.0
self.twist_publisher.publish(twist_msg)
CV 2 and ROS 2
Topic과 ROS 2 Bag을 사용한 예시를 실행해보고자 합니다.
이번 실습을 위해 제가 미리 준비한 데이터셋을 제공드리니, 기억하기 쉬운 위치에 다운받아 주세요.
Windows + WSL2 유저의 경우 explorer.exe 명령어를 통해 파일 탐색기를 열 수 있습니다.
- 준비된 예시를 실행해봅시다.
# 예제 실행 준비
sudo apt install ros-foxy-rosbag2
cd ~/ros2_ws
colcon build --packages-select py_cv_tutorial
source install/local_setup.bash
# 터미널 1 – 데이터 위치로 이동하여 ros2 bag 실행
cd <데이터를 저장한 위치>
ros2 bag play quadrupped_train.bag_0.db3
# 터미널 2 – image_view 실행
ros2 run rqt_image_view rqt_image_view
- 사진과 같이 기차 선로 모습이 보인다면 성공입니다.

해당 데이터셋은 기차 선로에서 주행하는 4족 보행 로봇으로부터 취득한 것입니다. 기차 선로는 주기적으로 관리가 필요하며, 길고 긴 선로를 로봇이 자동으로 검사해준다면 아주 유용할 것입니다. 이러한 상상을 해보면서 실습에 임해봅시다.

Example1 - CV Bridge
이미지를 다루기 위한 오픈소스 라이브러리인 OpenCV를 사용해보려 합니다. 준비된 예시와, ros2 bag 파일을 실행하면 cv2.imshow를 통해 연속된 이미지를 확인할 수 있습니다.
# 터미널 1
$ cd <bag 파일 위치>
$ ros2 bag play quadruped_train.bag_0.db3
[INFO] [1667077909.362223100] [rosbag2_storage]: Opened database 'quadrupped_train/quadrupped_train.bag_0.db3' for READ_ONLY.
# 터미널 2
$ ros2 run py_cv_tutorial img_sub
[INFO] [1667077909.613586300] [image_subscriber]: Receiving video frame
[INFO] [1667077910.934147000] [image_subscriber]: Receiving video frame
...
- OpenCV에서는 CV::Mat 이라는 특정 타입을 사용합니다. 이를 ROS 2의 Topic Message로 변환하기 위해서 CV Bridge라는 것을 사용합니다.
from cv_bridge import CvBridge # Package to convert between ROS and OpenCV Images
import cv2 # OpenCV library
class ImageSubscriber(Node):
def __init__(self):
# Used to convert between ROS and OpenCV images
self.br = CvBridge()
...
def listener_callback(self, data):
...
# Convert ROS Image message to OpenCV image
current_frame = self.br.imgmsg_to_cv2(data, "bgr8")
edge_frame = self.hough_transform(current_frame)
- imgmsg_to_cv2를 통해 CV::Mat으로 변환된 이미지 데이터를 OpenCV의 다양한 기능들과 함께 사용할 수 있습니다. 코드의 imshow 부분을 바꿔서 이미지 처리를 적용해 봅시다. 직선을 검출하는 알고리즘이며, 매개변수의 최적화를 통해 선로를 인지할 수 있습니다.
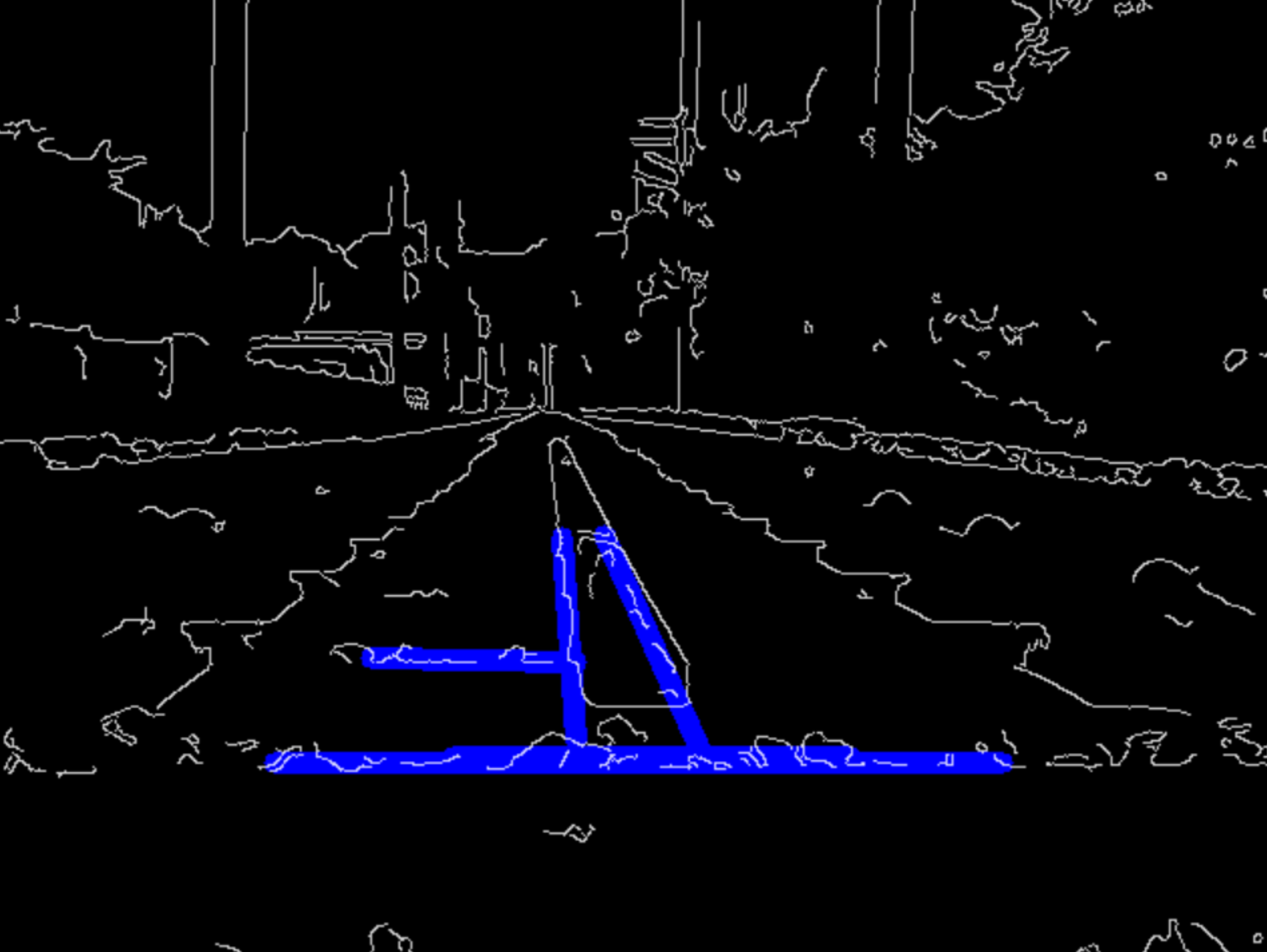
직선 검출을 위해 사용된 OpenCV 기능들은 아래와 같습니다. 로직을 업그레이드하여 여러분만의 선로 검출 알고리즘을 만들어 보세요!
rosbag to img
컴퓨터 비전만으로 완벽한 선로 인식을 구현하기는 너무나 힘듭니다. 딥러닝을 사용해서 이를 극복할 수 있을 것이며, 데이터셋의 제작을 위해 rosbag 데이터에서 이미지를 추출하는 예시를 준비하였습니다.
$ ros2 run py_cv_tutorial rosbag2_to_timedimg
/home/kimsooyoung/djhrd_ws/quadrupped_train/quadrupped_train.bag_0.db3
saved: color_1666796292992515592.png
saved: color_1666796293035428479.png
saved: color_1666796293079139778.png
saved: color_1666796293120768031.png
- 예제 실행 전 main 함수에서 bag 파일의 위치를 여러분의 것으로 수정해야 합니다.
def main(args=None):
# Change below roots to your ros2 bag locations
ROOT_DIR = "/home/kimsooyoung/djhrd_ws/quadrupped_train"
FILENAME = "/quadrupped_train.bag_0.db3"
DESCRIPTION = "color_"
- 예제 실행 후 사진과 같이 기차 생성된 이미지들이 보인다면 성공입니다.