Lecture6 - ROS 2 Service and Examples
ROS 2 Service
ROS Service의 개념을 다시 복습해봅시다.
- image from : docs.ros.org
Service 개념 정리
- Service를 요청하는 주체를 Service Client라고 하며, Service 요청 자체를 Request, 혹은 Call이라고 합니다.
- Service를 요청받는 주체를 Service Server라고 하며, Service Server는 Request에 대한 응답, 즉 Service Response를 다시 Service Client에게 회답합니다.
- Request와 Response를 위해 사용되는 데이터 타입은 srv라고 하며 Request와 Response로 나뉩니다.
Service의 중요한 특징 한 가지 추가하자면, 하나의 Service Server에 여러 Client가 request 할 수 있지만, Server는 동시에 여러 request를 처리하지 못합니다.
- image from : docs.ros.org
ROS Service 커멘드 라인
지난 topic 예시와 같이 ROS 1에서 ROS 2로 넘어오면서 변경된 커멘드 라인들을 살펴보겠습니다.
- rosservice list ⇒ ros2 service list
- ros2 service info는 없으며, ros2 service type으로 변경되었습니다.
- srv는 ros2 interface show로 조회 가능합니다.
$ ros2 interface show turtlesim/srv/Spawn
float32 x
float32 y
float32 theta
string name # Optional. A unique name will be created and returned if this is empty
---
string name
서비스 타입 중간에 보이는 - - - 부분은 request와 response의 구분자라고 생각하시면 됩니다.
Service Example - 📸 KimChi Service
이번에 보여드릴 ROS 2 service 예시는 사진을 찍는 service server입니다.
- 예시 실행 - rqt를 통해 service call이 성공하면 현재 시간에 해당하는 파일이름으로 로봇이 바라보는 시야의 카메라 이미지가 PNG 형식으로 저장됩니다.
# Terminal 1 - 여러분들만의 world를 사용하시면 더욱 좋습니다.
$ ros2 launch src_gazebo empty_world.launch.py
# Terminal 2
$ colcon build --packages-select py_service_tutorial
$ source install/local_setup.bash
$ ros2 run py_service_tutorial take_picture_server
[INFO] [turtle_circle_server]: Picture Taking Node Started
[INFO] [turtle_circle_server]: KimChi~
[INFO] [turtle_circle_server]: Image saved in 1672569224.png
# Terminal 3 - rqt 실행 후 service caller 실행 (plugins => services => service caller)
$ rqt
- Service Caller의 사용법과 결과는 다음과 같습니다.
코드를 살펴보기 전에, 이를 어떻게 구현할 수 있을지 같이 생각해봅시다.
- 사진 촬영을 포함하는 Service Server 필요
- 로봇 전방 image data의 Subscriber 필요
- ROS의 sensor_msgs/msg/Image를 저장 가능한 포멧으로 변경 필요
따라서, Node의 생성자는 다음과 같이 작성합니다.
class PictureNode(Node):
def __init__(self):
super().__init__('turtle_circle_server')
self.server = self.create_service(
SetBool, 'take_picture', self.take_picture_callback
)
self.subscriber = self.create_subscription(
Image, 'logi_camera_sensor/image_raw', self.sub_callback, 10
)
self.br = CvBridge()
self.is_request = False
- 이번에 사용하는 srv는 example_interfaces/srv/SetBool이며, Bool Type의 request와 String response를 갖고 있습니다.
$ ros2 interface show example_interfaces/srv/SetBool
# This is an example of a service to set a boolean value.
# This can be used for testing but a semantically meaningful
# one should be created to be built upon.
bool data # e.g. for hardware enabling / disabling
---
bool success # indicate successful run of triggered service
string message # informational, e.g. for error messages
- service call에 대한 callback입니다. is_request를 바꿔주기만 하는데, 이것이 하는 역할이 무엇일지 생각해보세요.
def take_picture_callback(self, request, response):
if request.data is True:
self.get_logger().info('KimChi~')
self.is_request = True
response.success = True
response.message = "Successfully image written"
return response
- 정답은 subscription callback에서 찾을 수 있습니다. subscribe된 이미지 데이터는 is_request가 True인 순간에만 사용됩니다. CV Bridge를 통해 ROS topic을 OpenCV 포맷으로 바꿀 수 있으며, imwrite를 통해 이미지를 저장할 수 있습니다.
def sub_callback(self, data):
if self.is_request:
current_frame = self.br.imgmsg_to_cv2(data, "bgr8")
file_name = str(self.get_clock().now().to_msg().sec) + '.png'
cv2.imwrite(file_name, current_frame)
self.get_logger().info(f'Image saved in {file_name}')
self.is_request = False
Gazebo에 다양한 물체를 배치시킨 뒤 사진을 찍어보는 것도 좋은 실습이 될 것입니다. 제가 준비한 dataset을 사용하여 여러분들만의 실습도 해보세요.
- 제공되는 3DGEMS 폴더를 압축해제한 뒤, ~/.gazebo/models 폴더에 위치시킵니다.
해당 모델들의 출처는 다음과 같습니다. (“The Effect of Color Space Selection on Detectability and Discriminability of Colored Objects.” arXiv preprint arXiv:1702.05421 (2017).)
WSL2를 사용하시는 분들께서는 터미널에서 explorer.exe . 를 입력하면 윈도우 파일 탐색기를 실행 가능합니다.
- 다시 한 번 Gazebo를 실행시킨 뒤 새로 추가된 모델들을 사용해봅시다.
Server Client Example - Spawn Model
이번 예시는 ROS 1강의에서도 살펴본 바 있는, urdf를 사용하여 gazebo 상에 물체를 등장시키는 예시입니다.
- 예시 실행
ros2 launch src_gazebo wall_world.launch.py
ros2 run py_service_tutorial spawn_model
Gazebo에서 일정한 간격을 두고, 하얀색 박스가 등장하게 됩니다. 매번 박스가 등장할 때마다 service call이 이루어지는 것이지요.
- ROS 1에서의 예시와 기능은 동일하므로 중요한 코드들만 간단히 분석해봅시다. 사용하는 srv는 gazebo_msgs/srv/SpawnEntity 입니다.
from gazebo_msgs.srv import SpawnEntity
import rclpy
from rclpy.node import Node
- create_client를 통해 Service Client를 생설할 수 있습니다.
class SpawnRobot(Node):
def __init__(self):
super().__init__('gazebo_model_spawner')
self.client = self.create_client(SpawnEntity, 'spawn_entity')
while not self.client.wait_for_service(timeout_sec=1.0):
self.get_logger().error('service not available, waiting again...')
create_client의 매개변수는 각각 다음과 같습니다.
- Service srv type - SpawnEntity
- Service server 이름 - ‘spawn_entity’
main문은, 일반적인 node 실행과 다소 차이를 보입니다. Future라는 개념을 사용하여 이벤트 기반 spin을 구현하였습니다.
future = robot_spawn_node.send_req()
rclpy.spin_until_future_complete(robot_spawn_node, future)
if future.done():
try:
response = future.result()
except Exception:
raise RuntimeError(
'exception while calling service: %r' % future.exception()
)
else:
robot_spawn_node.get_logger().info('==== Service Call Done ====')
robot_spawn_node.get_logger().info(f'Status_message : {response.status_message}')
finally:
robot_spawn_node.get_logger().warn('==== Shutting down node. ====')
친구와 명확한 약속을 했다면, 그동안 다른 일을 할 수 있는 것처럼 Future는, 효율적인 비동기 프로그래밍을 위해 사용됩니다.

image from : brunch.co
- service call이 이루어지는 send_req에서 이 Future를 반환하고 있습니다.
def send_req(self):
...
self.future = self.client.call_async(self.req)
return self.future
- launch file을 보면 gazebo의 실행을 비롯하여 spawn_model node도 함께 실행됩니다. 그래서 gazebo가 등장하자마자 하얀 박스들이 생성되었던 것입니다.
spawn_parking_lot = Node(
package='py_service_tutorial',
executable='spawn_model',
name='spawn_model',
output='screen'
)
이 예시는 다음 Action에서도 활용되므로 잘 기억해두시기 바랍니다.
Custom Interface와 코딩 과제 - Turtle Jail
ROS 2에서 custom interface를 만들기 위해서는 C++ Package에서 작업이 이루어져야 합니다. C++ package는 build type ament_cmake를 사용하는 package였습니다.
$ ros2 pkg create --build-type ament_cmake <package-name>
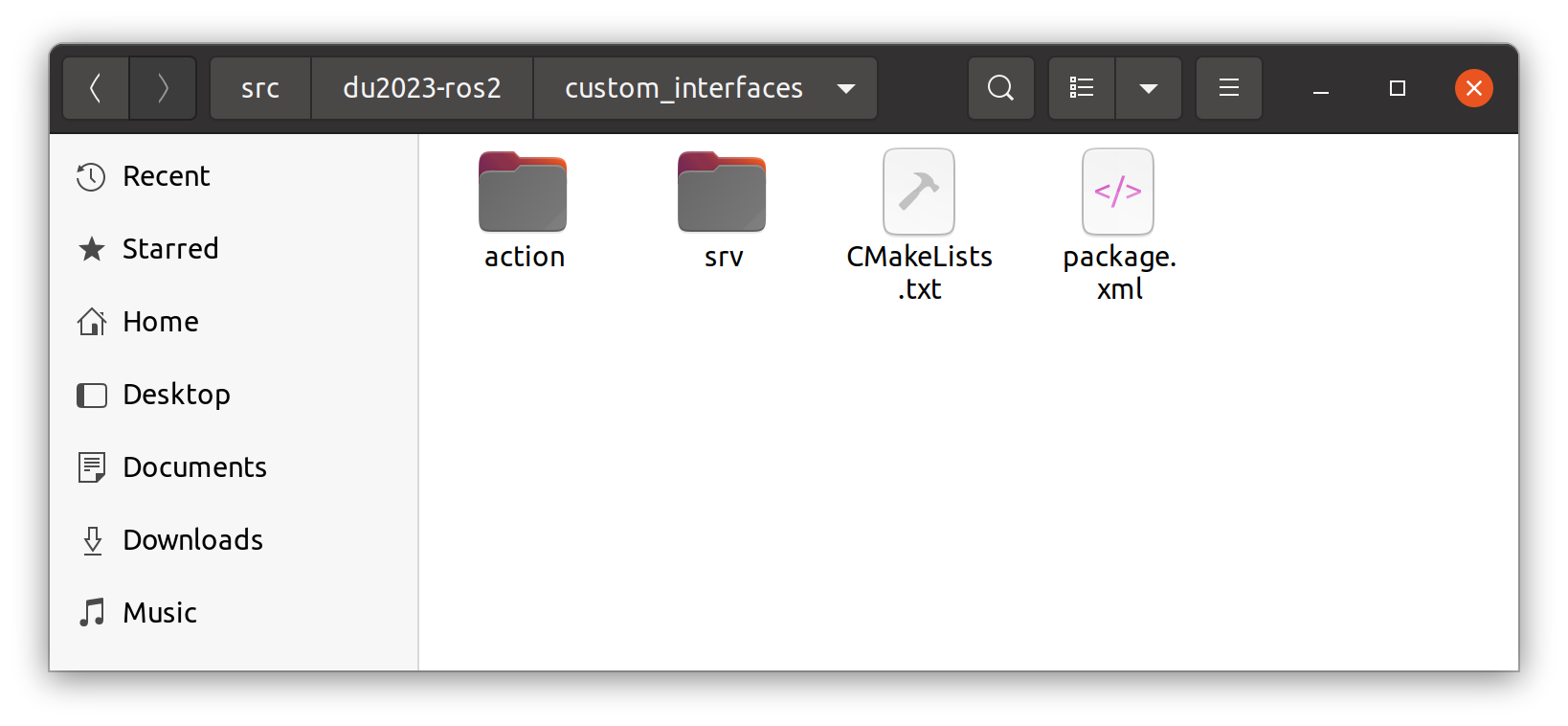
$ ros2 pkg create --build-type ament_cmake custom_interfaces
- 해당 패키지 내 action, msg, srv 라는 폴더를 만들고 해당 폴더 안에 나만의 인터페이스를 작성합니다.
사용할 수 있는 기본 데이터 형식들은 이 링크를 참고합니다.
이번에 만들어볼 custom interface는 다음 과제와 연결됩니다. 우선 저를 따라와 주세요.
- srv라는 폴더를 만들고, TurtleJail.srv라는 파일을 생성하여 아래와 같은 내용을 작성합니다.
float32 width
float32 height
---
bool success
해당 interface를 rclpy, rclcpp에서 사용 가능하도록 해봅시다. ROS 2는 DDS의 IDL(Interface Description Language)를 사용하여 다양한 언어에서 사용 가능한 데이터 타입을 만들 수 있습니다.
- CMakeLists.txt 수정
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Num.msg"
"srv/AddThreeInts.srv"
"srv/TurningControl.srv"
"srv/TurtleJail.srv"
"action/Fibonacci.action"
"action/Maze.action"
)
- package.xml 수정
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
- 패키지 빌드
$ colcon build --packages-select custom_interfaces && rosfoxy
Starting >>> custom_interfaces
Finished <<< custom_interfaces [0.62s]
Summary: 1 package finished [0.84s]
- 이제 ROS 2에서 해당 인터페이스를 사용할 수 있습니다 (단, 해당 workspace를 바라보게 해야 합니다.)
$ ros2 interface show custom_interfaces/srv/TurtleJail
float32 width
float32 height
---
bool success
custom interface의 사용 시 파이썬 패키지에서는 별도 작업 없이 사용 가능하지만 C++ 패키지는 코딩 시 CMakeLists.txt의 수정이 필요합니다. 이는 다소 난이도가 있어 강의에서 살피지는 않고 링크를 남겨두겠습니다.
Assignment - Turtle Jail
topic과 service에 대해서 모두 살펴본 지금 상황에서 여러분들께 코딩 과제를 제시해보고자 합니다. 이번 코딩 과제에서 구현해야 하는 최종 결과는 다음과 같습니다.
rqt를 통해 turtle_jail_size service call을 하며, 감옥의 사이즈를 설정합니다.
거북이는 감옥을 벗어날 수 없으며, 감옥을 벗어나는 순간 원점으로 순간이동합니다.
- 터미널에서 실행하는 절차는 다음과 같습니다.
# Terminal 1 – turtlesim실행
ros2 run turtlesim turtlesim_node
# Terminal 2 - turtle_teleop 실행
ros2 run turtlesim turtle_teleop_key
# Terminal 3 - 과제 프로그램 실행
ros2 run py_service_tutorial turtle_jail
[INFO] [turtle_jail_node]: === [Service Client : Ready to Call Service Request] ===
[INFO] [turtle_jail_node]: ==== [Service Server : Ready to receive Service Request] ====
# Terminal 4 - rqt의 service caller 실행 후 /turtle_jail_size에게 service call
cd ~/ros2_ws
source install/local_setup.bash
rqt
이번 예시는 custom interface를 사용하므로 local_setup.bash를 꼭 실행해주세요!
이 예시에서는 topic과 service를 모두 사용해야 합니다. 지금까지 학습한 내용들을 확인해볼 수 있는 좋은 기회가 될 것입니다.
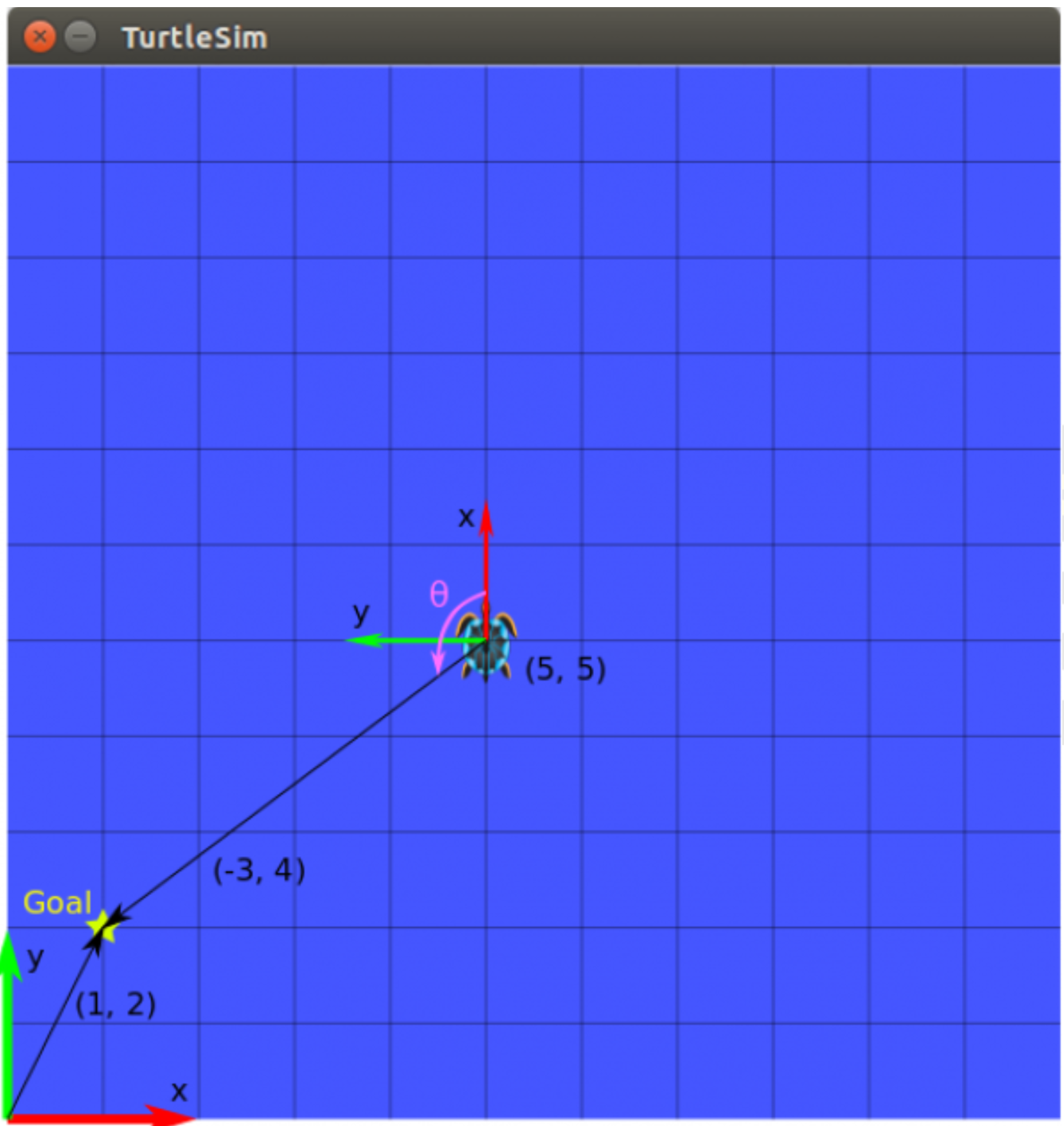
- 힌트1 : turtlesim의 좌표계
- 힌트 2 : 거북이를 순간이동시키기 위해 /turtle1/teleport_absolute service를 사용하세요.