Lecture7 - Useful ROS 2 Example, Navigation2
코딩을 시작하기 전에 구현해야 하는 기능들과 Topic, Service 기준 input, output을 정리해봅시다.
- Part 1 - 감옥 구현
거북이가 일정 범위를 벗어나게 되면 다시 원위치로 돌아오게 한다.
- 거북이의 위치는 /turtle1/pose topic subscribe을 통해 얻을 수 있습니다.
- 거북이가 일정 위치를 벗어나는 순간, 원위치로 돌아오게 하는 /turtle1/teleport_absolute service call을 해야 합니다. 이를 위한 service client가 필요합니다.
- Part 2 - 감옥 크기 변경
사용자로부터 감옥의 크기를 변경해달라는 service request가 오면 기존 감옥의 크기를 변경하는 작업이 필요하다.
- /turtle_jail_size service server를 구현해야 합니다.
- 감옥의 크기가 변경되면 topic 로직에도 반영되어야 하므로 OOP의 형태로 구현이 필요할 듯 합니다.
코드를 구현하기 위해 필요한 topic, service interface들을 조회합시다.
$ ros2 interface show custom_interfaces/srv/TurtleJail
float32 width
float32 height
---
bool success
$ ros2 interface show turtlesim/srv/TeleportAbsolute
float32 x
float32 y
float32 theta
---
$ ros2 interface show turtlesim/msg/Pose
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity
모든 필요조건들을 알게 되었습니다. 이제 프로그래밍을 해보겠습니다.
- 필요 파이썬 패키지 import
import rclpy
from rclpy.node import Node
from turtlesim.msg import Pose
from turtlesim.srv import TeleportAbsolute
from custom_interfaces.srv import TurtleJail
- Service Server, Service Client, Topic Subscriber 생성
# Create Turtle teleport client
self.client = self.create_client(TeleportAbsolute, 'turtle1/teleport_absolute')
while not self.client.wait_for_service(timeout_sec=1.0):
self.get_logger().info('Service not available, Waiting again...')
self.request_srv = TeleportAbsolute.Request()
self.get_logger().info('=== [Service Client : Ready to Call Service Request] ===')
# Create Subscriber for turtle1/pose
queue_size = 10 # Queue Size
self.pose_subscriber = self.create_subscription(
Pose, 'turtle1/pose', self.sub_callback, queue_size
)
# Create Service Server for User Interfaces
self.srv = self.create_service(
TurtleJail, 'turtle_jail_size', self.turtle_jail_callback
)
self.get_logger().info('==== [Service Server : Ready to receive Service Request] ====')
- 클래스 변수 선언 (감옥 사이즈, 벽에 도달하기 전 거북이의 각도)
# Preserve its rotation before teleport
self.cur_theta = 0.0
# jail size in rectangular form
self.jail_width = 6.0
self.jail_height = 6.0
topic subscribe와 service server에 대한 callback이 두 개 필요합니다.
- 거북이의 Pose Topic Subscribe Callback
def sub_callback(self, msg):
"""Turtle Pose Subscriber Callback"""
if abs(msg.x - 6.0) > self.jail_width or abs(msg.y - 6.0) > self.jail_height:
self.cur_theta = msg.theta
self.get_logger().warn("You can't go out Turtle! :(")
self.send_request()
- 감옥 사이즈 변경 요청 시 발생하는 Service Server Callback
def turtle_jail_callback(self, request, response):
"""Service Server for jail resizing client request"""
self.jail_width = request.width
self.jail_height = request.height
self.get_logger().info(f"""Jail Size Update to {self.jail_width}/{self.jail_height}""")
response.success = True
return response
- 마지막으로, 거북이를 원점으로 이동시켜달라는 service request를 구현합니다.
def send_request(self):
"""Service Clinet request fuction"""
self.request_srv.x = 6.0
self.request_srv.y = 6.0
self.request_srv.theta = self.cur_theta
self.future = self.client.call_async(self.request_srv)
return self.future
바로 코딩을 시작하지 말고, 무엇을 구현해야 하는지 적어보는 것, 조금씩 조금씩 구현한 뒤, 확인하면서 개발하는 것, ROS 뿐만 아니라 앞으로의 프로그래밍에서 반드시 잊지 마시기 바랍니다.
Navigation 2
이번 시간에는 유용한 ROS 2 프로젝트를 소개하고, 관련된 내용을 함께 살펴보고자 합니다. ROS 2의 자율 주행 메타페키지인 Navigation 2, Nav2 입니다.
image from : https://navigation.ros.org
Nav 2는 삼성 리서치 아메리카의 Steven Macenski의 주도 하에 개발되고 있으며, 아래와 같은 자율주행을 위해 필요한 거의 모든 기능들을 집합해둔 프로젝트입니다.
- 지도 저장, 전송, 관리 (Map Server)
- 지도 상에서 로봇의 위치 파악하기 (AMCL)
- A to B 주행을 위한 경로 생성 (Nav2 Planner)
- 경로를 따라 로봇을 이동시키기 위한 컨트롤 시스템 (Nav2 Controller)
- 주행 경로의 최적화 (Nav2 Smoother)
- Costmap 생성과 센서 데이터 반영 (Nav2 Costmap 2D)
- Behavior Tree를 통한 복잡한 주행 시나리오 핸들링 (Nav2 Behavior Trees and BT Navigator)
- 주행 실패를 방지하기 위한 recovery behaviors (Nav2 Recoveries)
- Waypoints 주행 (Nav2 Waypoint Follower)
- Nav2 Node들의 모니터링과 관리 (Nav2 Lifecycle Manager)
- 커스텀 알고리즘 개발을 위한 Plugins (Nav2 Core)
일반 개발자나 기업이 자율주행을 구현하기 위해서는 이렇게 많은 것들이 필요합니다. 하지만, ROS 2를 사용한다면 Nav 2를 통해 많은 시간을 단축할 수 있지요!
이 강의에서 모든 내용을 다루고 싶지만, 시간적 한계가 있기 때문에 예시를 통해 로봇 자율주행에 대한 개념을 체감해보도록 하겠습니다.

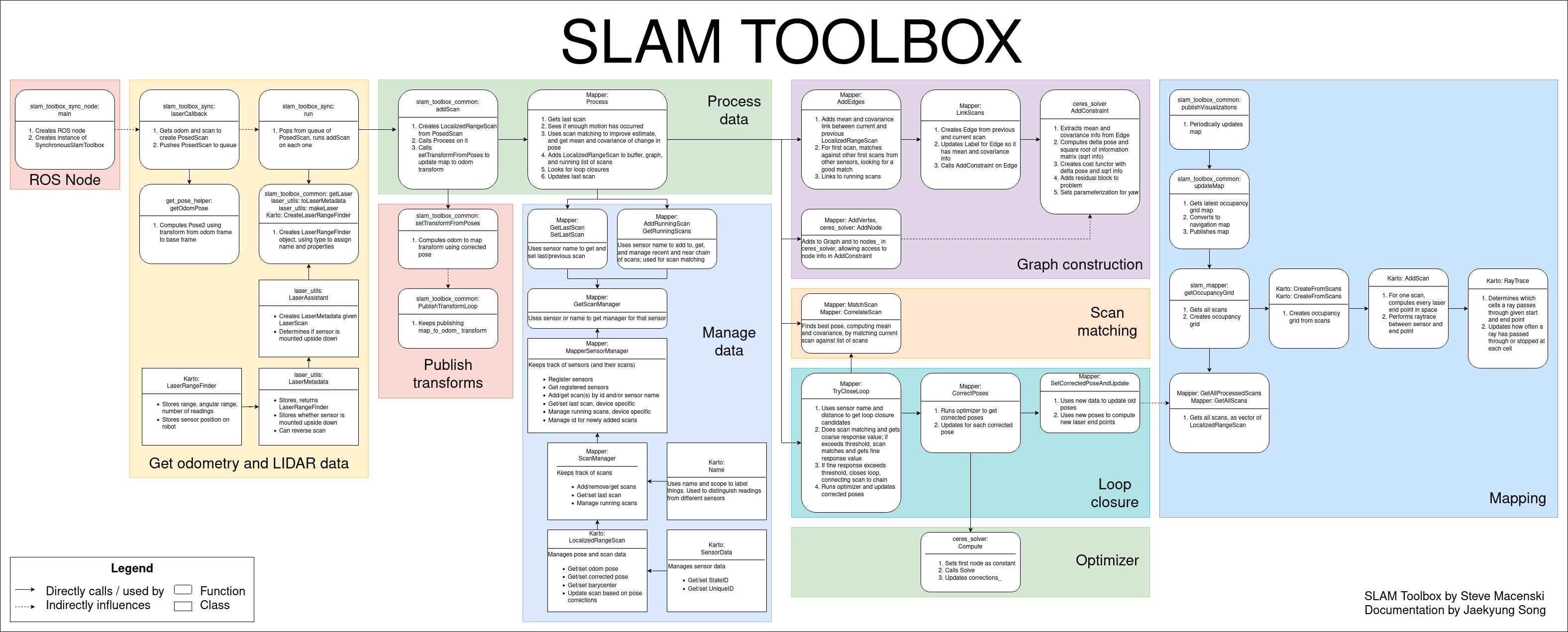
Nav 2 Example 1 - SLAM_ToolBox
처음 가보는 환경을 맞닥뜨리면, 우리는 주변 상황을 탐색하고 내 위치를 파악하려 할 것입니다. 이것을 로보틱스에서는 SLAM - Simultaneous localization and mapping이라고 이야기합니다.
- SLAM Toolbox는 Steven Macenski에 의해 제작된 ROS 2 패키지이며 backend와 frontend SLAM 알고리즘 뿐만 아니라, ROS 2와 호환되는 관리 도구, 최적화까지 담고 있습니다.
- 예시를 통해 SRC 로봇으로 SLAM을 실습해봅시다. 로봇을 이동시키면서 rviz에 갱신되는 지도를 확인합니다.
colcon build --packages-select src_slam
colcon build --packages-select src_odometry
source install/local_setup.bash
# Terminal 1
ros2 launch src_gazebo racecourse.launch.py use_rviz:=false
# Terminal 2
ros2 launch src_slam src_slam_gazebo_slam_toolbox.launch.py
지도를 저장하는 두 가지 방법이 있습니다.
- rviz plugin 사용 - RViz상의 공란에 지도를 저장할 위치를 포함한 절대경로를 기입하고 왼쪽 “Save Map” 버튼을 눌러 최종 지도를 추출합니다.
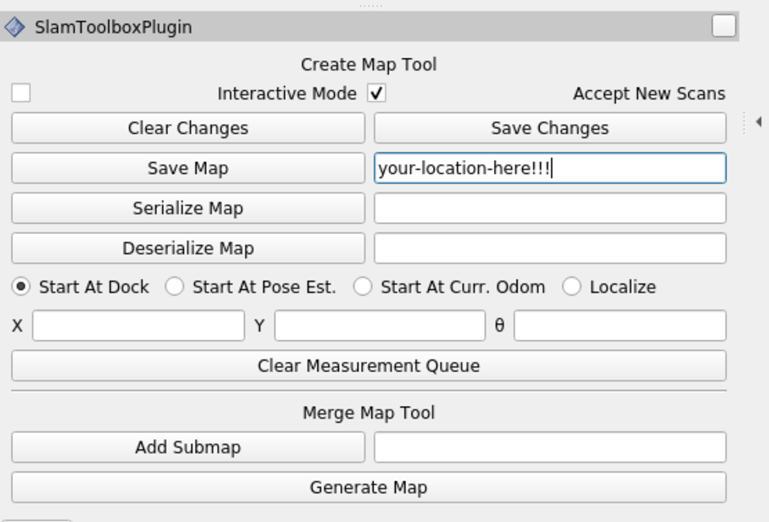
- 커멘드 라인 사용 - 저장 위치가 존재하는지 확인 후 실행하세요.
ros2 run nav2_map_server map_saver_cli -f <map_dir>/<map_name>
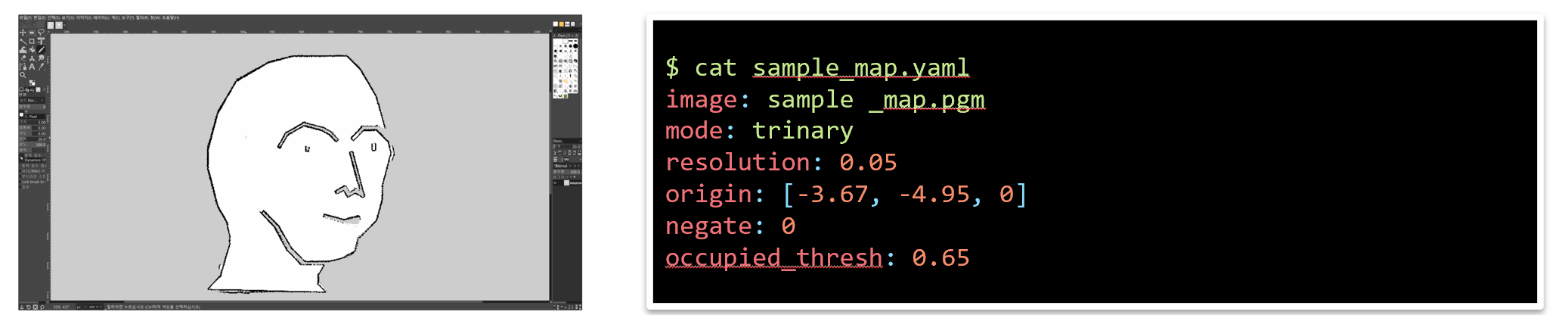
- 저장 결과로 두 가지 파일이 생성되며, 이러한 지도 데이터를 관리해주는 것이 Nav 2의 Map Server 입니다.
- 지도 이미지 파일
- 지도 정보를 담은 yaml 파일
Localization
로봇의 현재 위치와 방향을 파악하는 것을 localization이라고 부릅니다.
Nav2의 AMCL 패키지는 주어진 맵을 기반으로 Adaptive Monte Carlo Localization 방식을 사용하여 로봇의 위치를 파악합니다.
image from : wikipedia
{kind=link}
이 Adaptive Monte Carlo Localization은 입자(Particle)를 사용하여 로봇의 위치를 파악하는 방식이며, 이 입자들은 실제 로봇처럼 주어진 가중치와 함께 그들만의 좌표와 방향 값을 가지고 있게 됩니다.
로봇이 주어진 환경에서 이동하여 새 센서 데이터를 제공할 때마다 입자가 다시 샘플링되며, 각 샘플링에서 가중치가 작은 입자는 소멸되고 가중치가 큰 입자는 더 커지면서 생존합니다.
AMCL 알고리즘을 여러 번 반복하게 되면 입자들의 위치가 수렴하여 로봇 포즈의 근사치를 평가할 수 있고, 결국 이 로봇의 최종 방향과 위치를 추정하게 됩니다.
Nav2 Lifecycle Manager
Map Server, AMCL과 같은 Nav2의 stack은 Nav2 Lifecycle Manager에 의해 관리됩니다.
- Lifecycle이라는 것은 생성과 실행, 일시정지와 최종 종료와 같이 Node의 상태를 지칭합니다.
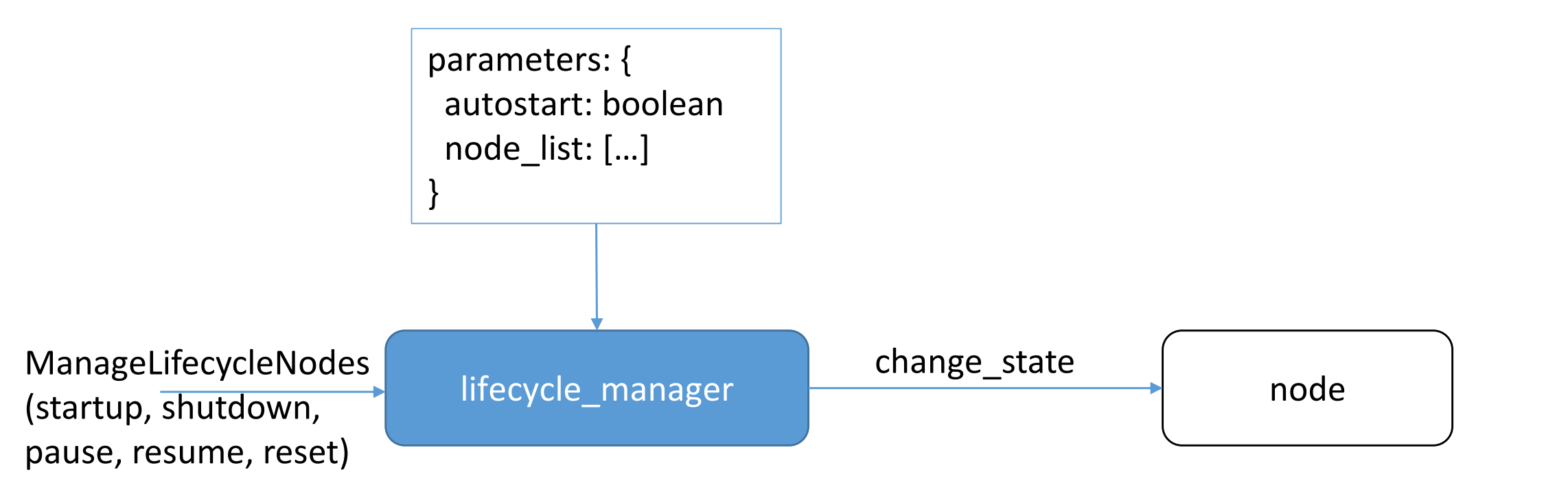
image from : roscon2019
- 기존 ROS 2도 lifecycle을 갖고 있지만, Nav 2는 전용 lifecycle_manager를 사용함으로 다른 node과 별도로 자율주행과 관련된 최적화된 시스템 설계가 가능해졌습니다.
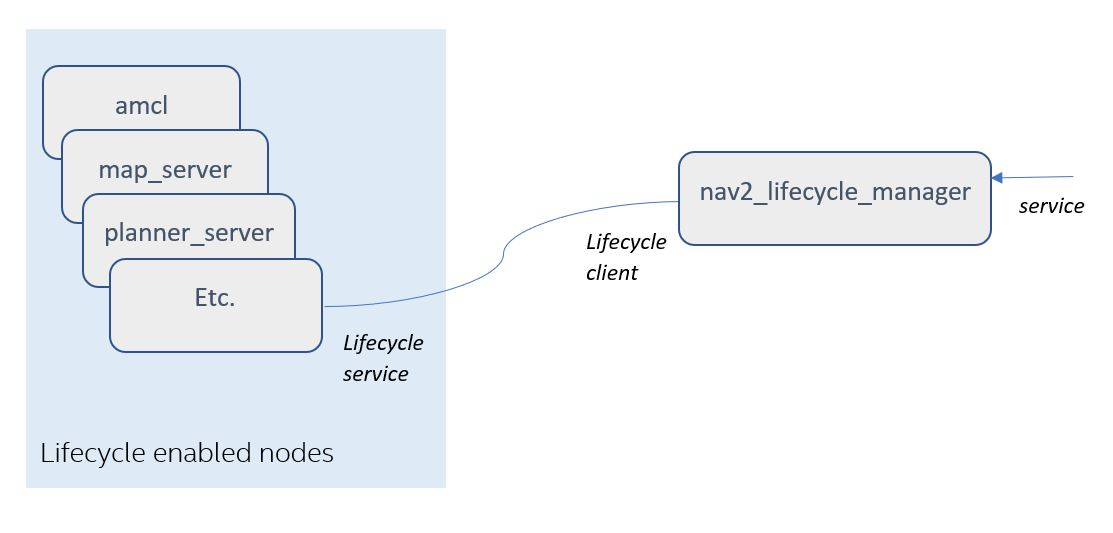
image from : navigation2
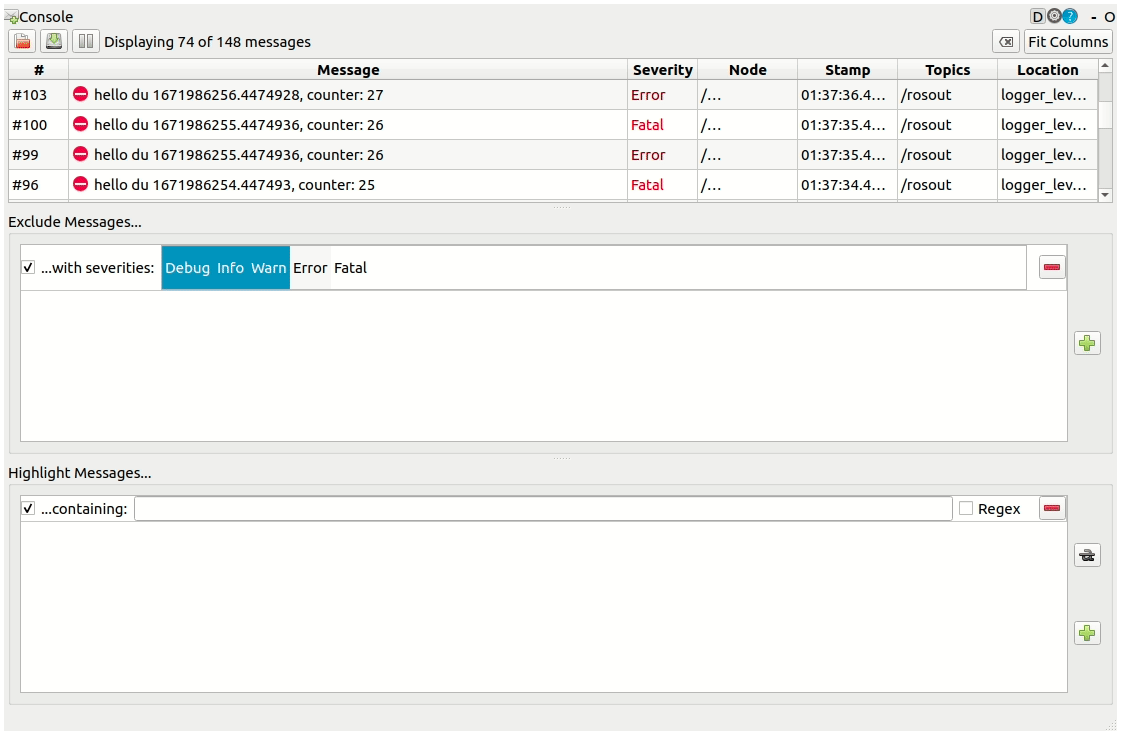
하지만, ROS 2의 lifecycle이 아닌 독자적인 방식을 사용하게 됨으로 디버깅 툴 사용이 불가하다는 점이 문제점으로 대두됩니다. 이러한 이유로, nav2 개발 시에는 rqt console의 사용을 권장합니다.
Costmap 2D
자율주행의 경로를 계산할 시, 일반적으로 구역을 나누고 장애물 여부, 충돌 가능 여부등을 점수화하여 구역별 costmap을 만듭니다.
Nav2에서도 로봇의 크기와 사용자의 정의에 따라 inflation을 적용한 costmap을 생성합니다.
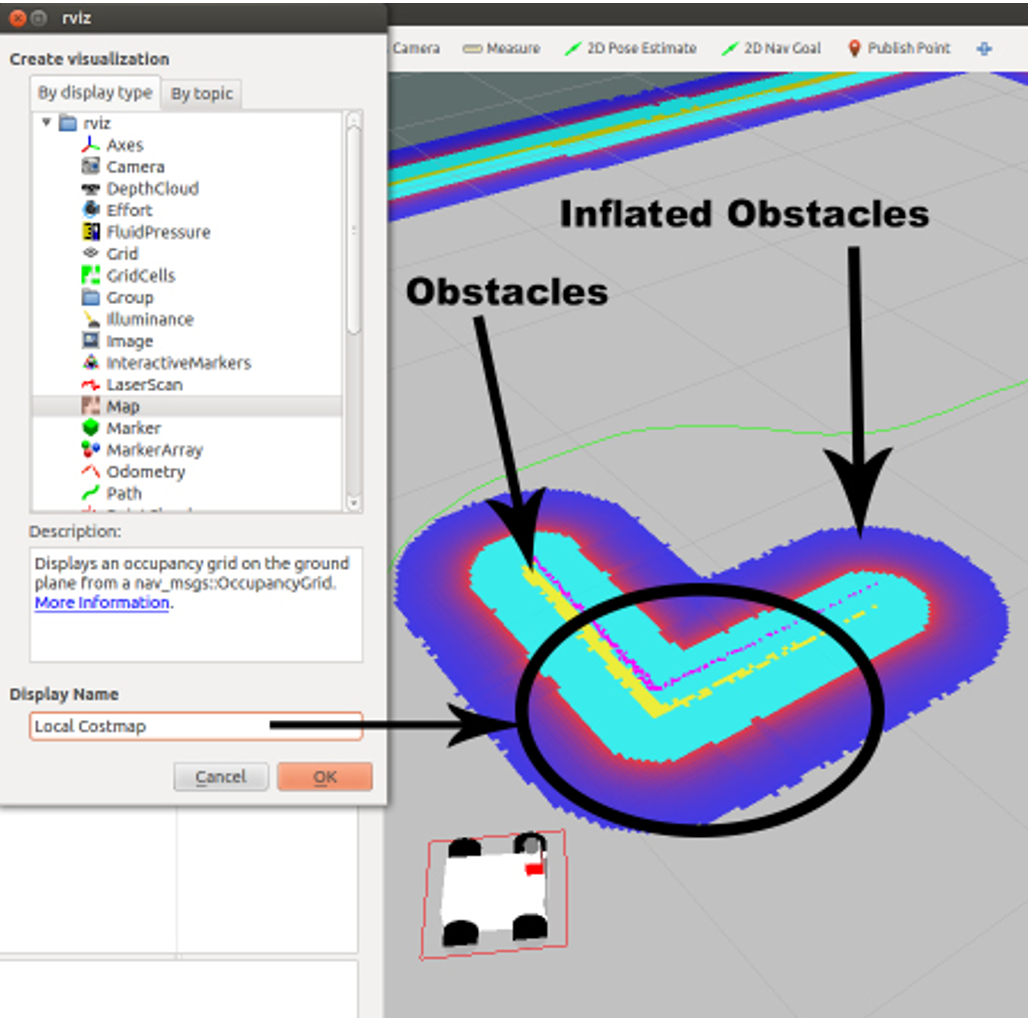
Nav2의 costmap에서 각 셀의 cost는 unknown, free, occupied, inflated로 정의되고, controller, planner, recovery plugin등이 이를 사용하여 안전하고 효율적인 경로를 계산하게 됩니다. 이 costmap에는 두가지 종류가 있는데
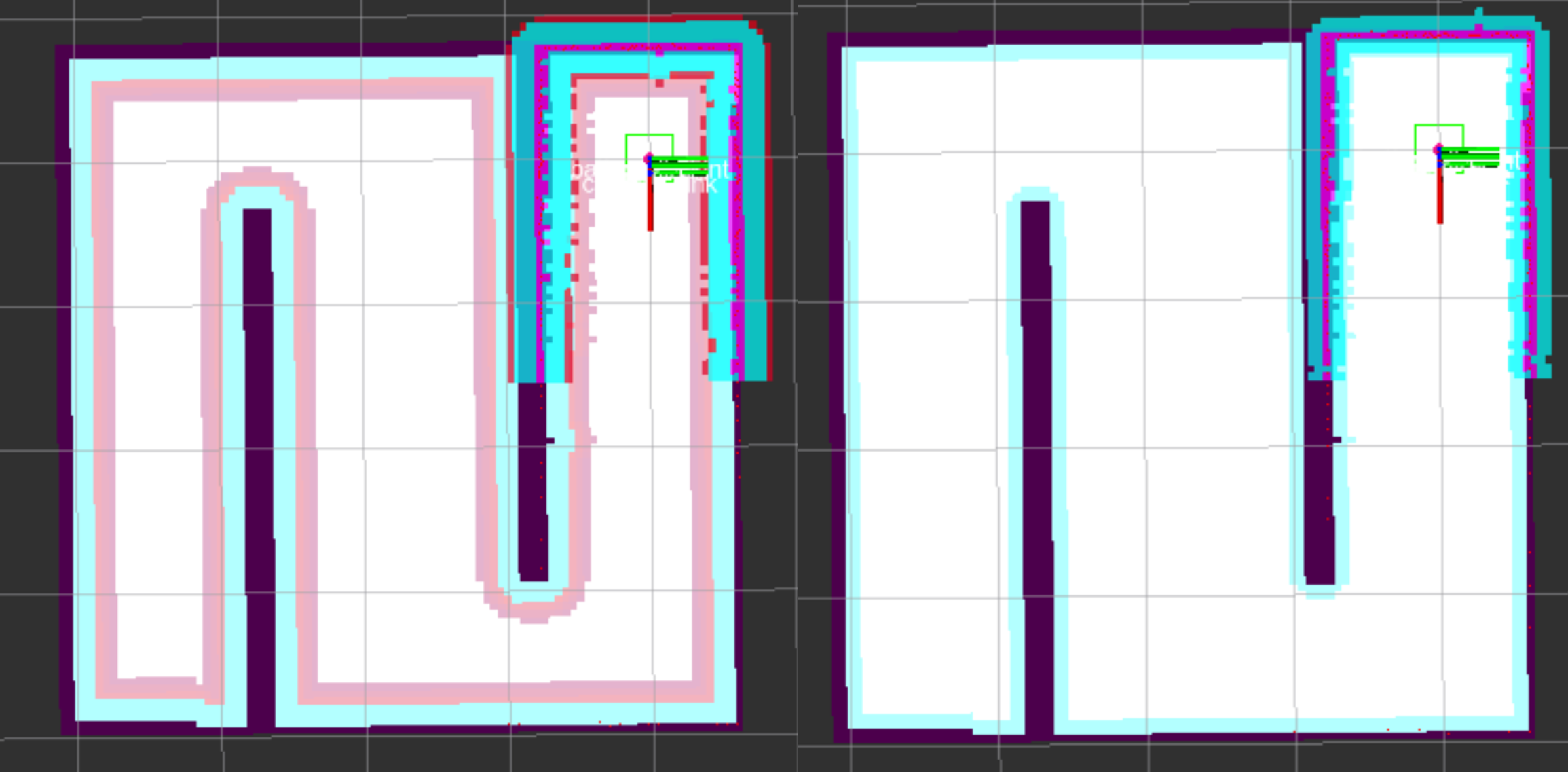
- Global Costmap은 SLAM을 통해 얻은 정적 지도를 기반으로 생성되며, 벽, 가구와 같이 SLAM 당시 존재했던 장애물들에 대한 costmap입니다.
- Local Costmap은 로봇 주위 일정 범위에 로봇에 부착된 센서들을 기반으로 생성되며, 동적 장애물을 감지할 수 있습니다. 로봇이 이동함에 따라 매번 갱신되는 데이터입니다.
아래 사진에서 왼쪽은 Global costmap을, 오른쪽은 Local costmap을 보이고 있습니다.
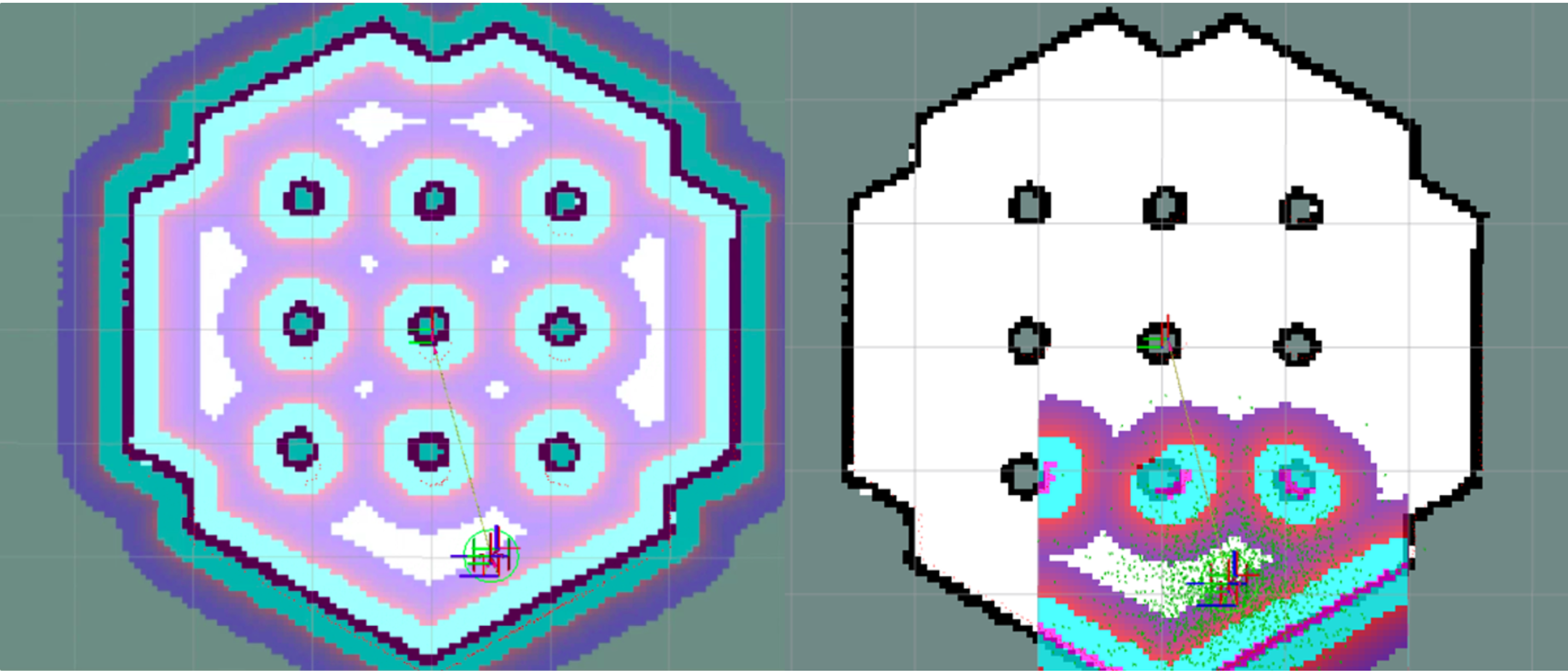
inflation의 변경에 따른 costmap의 차이는 아래와 같이 rviz 화면에서 확인할 수 있습니다. inflation을 줄이게 되면 경로 상 갈 수 있는 영역이 많아졌지만, 충돌 측면에서는 좀 더 위험해졌다고 말할 수 있습니다. 따라서, 로봇의 크기와 최대 속도, 제동거리를 고려하여 적절한 inflation radius를 설정해야 합니다.
Local Path와 Global Path
센서 데이터에서 장애물이 검출되었다면, local planner는 이를 회피하기 위해 기존 global planner와는 다른 별도의 경로를 따르도록 로봇에게 지시할 것입니다.
Nav2에서 물체 회피를 위해 수행되는 동작들은 다음과 같습니다.
- global planner가 지도를 기반으로 거시적인 경로를 계산하면 이 경로의 일부가 local planner에게 전달됩니다.
- local planner는 기본적으로 global Planner의 파편이지만, 현재 주행중인 환경과 센서 데이터를 입력으로 받아, 경로를 최신화합니다.
global plan과 local plan은 엄연히 다른 알고리즘이 사용되는 분야입니다.
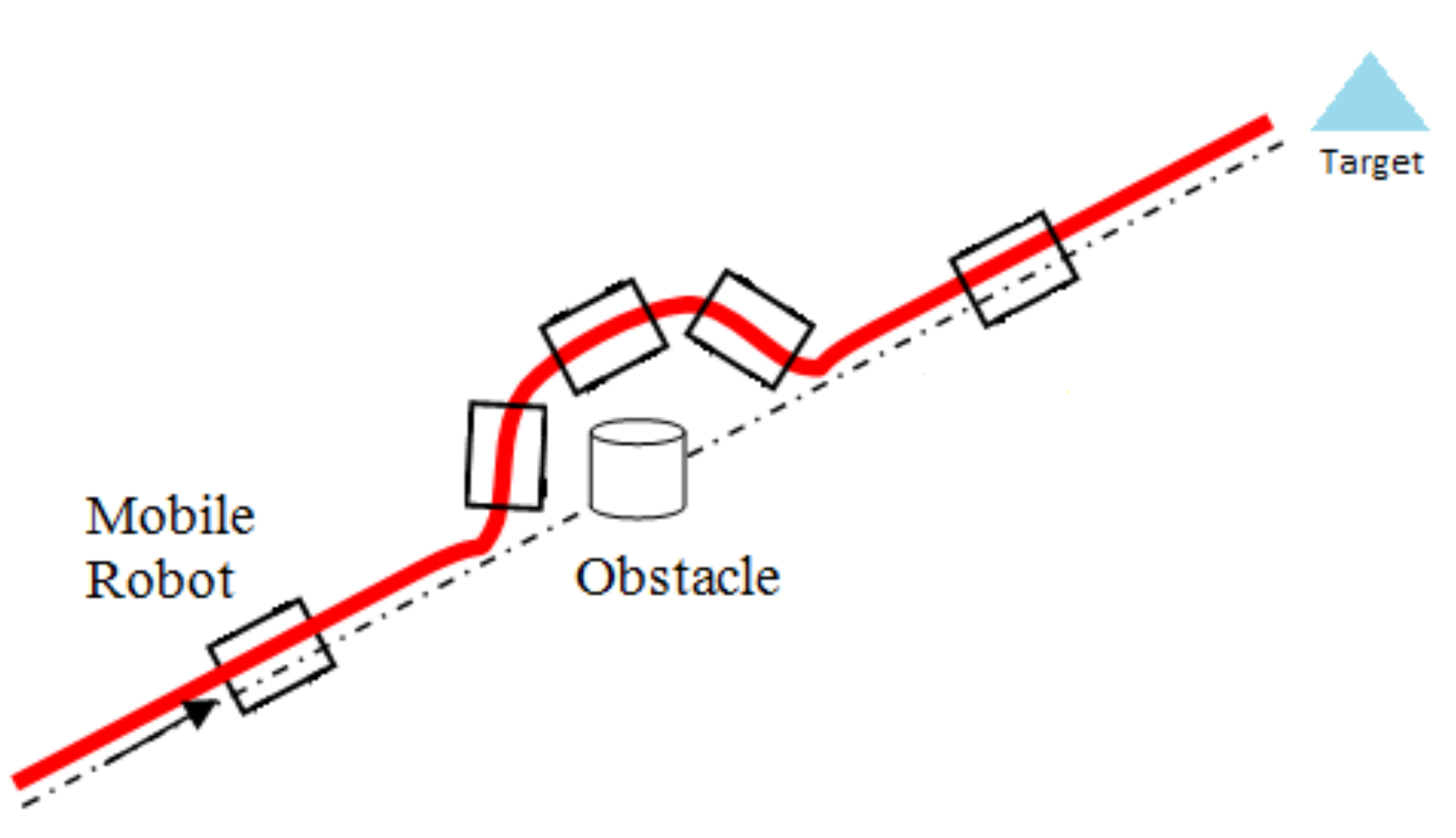
image from : Autonomous Wheeled Mobile Robot Control
Controller
local Path가 계산되었다면, 이제 로봇이 실제로 해당 경로를 주행할 차례입니다.
로봇의 최대 선속도, 각속도와 후진 여부 등 매개변수에 따라 경로를 최적화해야 합니다. Nav2에서는 Controller가 이를 담당하고 있습니다.
Controller는 그 이름과 같이 주어진 경로를 따르기 위해 로봇에게 실제 제어 신호를 전달하게 되며, 따라서 사용하는 로봇의 모델과 밀접한 관련이 있습니다. (제자리 회전, y축 이동 등)
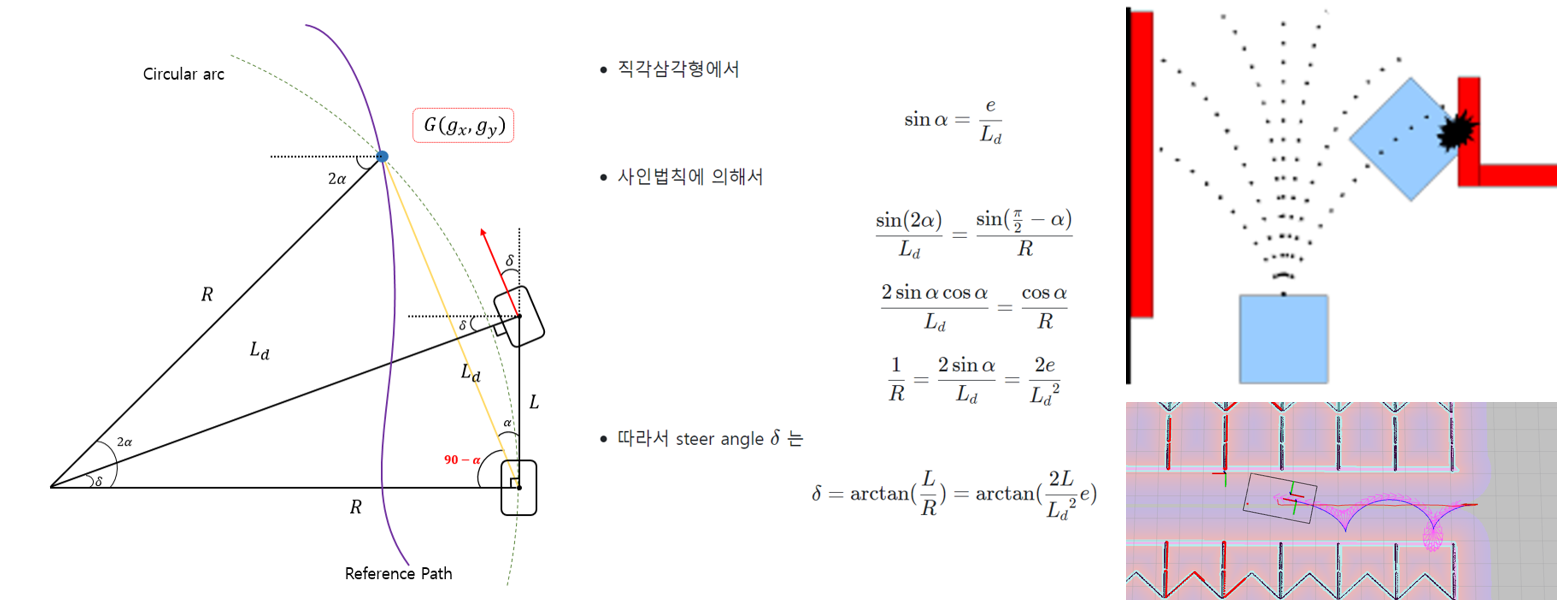
image from : dwa_local_planner
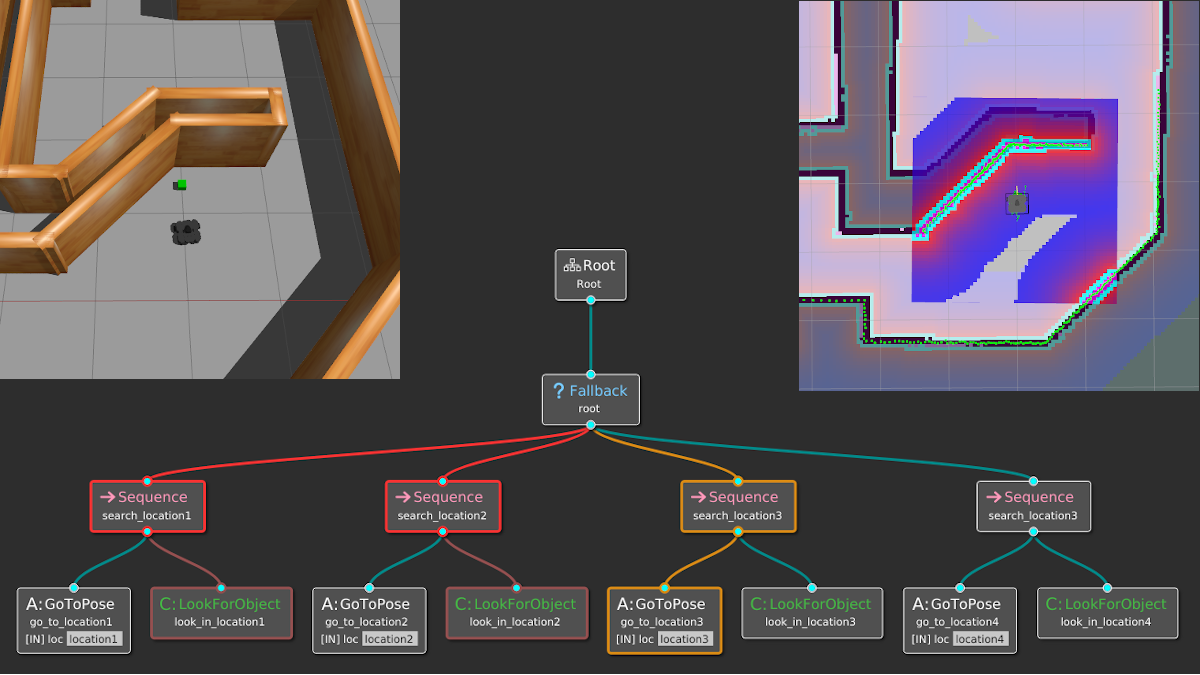
Nav2 Behavior Tree
로봇의 일련의 행동들은 Tree 자료 구조로 표현될 수 있으며, Tree의 Node에 해당하는 작업을 구현해두고 이들을 조합하여 시나리오를 구성할 수 있습니다.
- ex) A 위치에 도착한 뒤, 물건을 싣고, 다시 B 위치로 이동하여 새로운 물건을 싣고, 최종적으로 C지점으로 돌아와라. 만약 C 지점에 물건이 가득 차있다면 D 지점으로 이동하여 물건을 최종 이송해라…
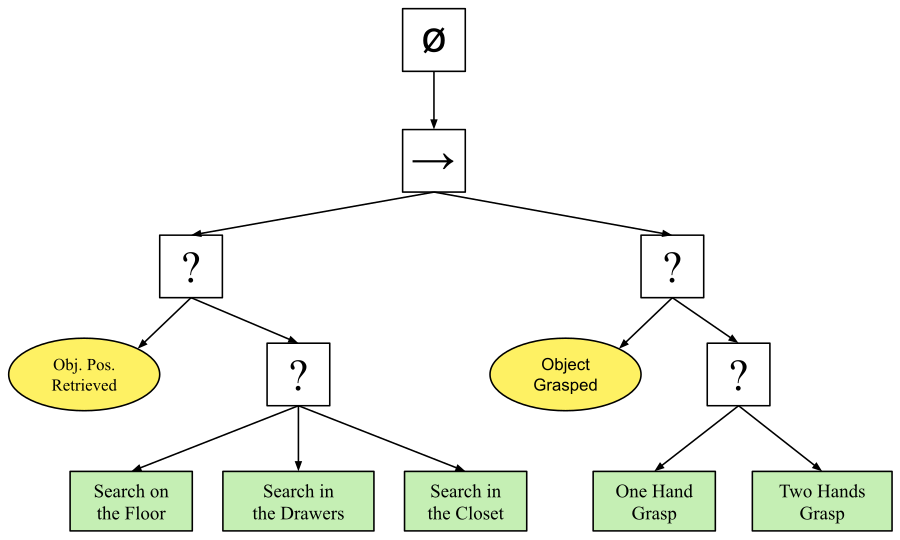
image from : wikipedia
- Nav2는 **BehaviorTree.CPP**를 사용하여 로봇의 자율주행 시나리오 기능을 제공합니다. Behavior Tree는 Nav2와는 별도의 오픈소스 프로그램인데, 시각화를 포함한 높은 완성도를 갖추고 있어 게임 및 로봇 도메인에서 많이 사용됩니다.
https://robohub.org/introduction-to-behavior-trees/
Nav2 Core
nav2_core 패키지는 custom 알고리즘을 적용한 플러그인을 구현할 수 있도록 인터페이스를 제공합니다. 연구실이나 기업에서는 자신만의 로직을 Plugin으로 구현해서 Nav2 시스템에 적용할 수 있으며, 이러한 방식으로 구현의 시간을 단축시킬 수 있습니다.
- Global Planner – global_planner.hpp
- Local Planner – local_planner.hpp
- Recovery behaviors – recovery.hpp
- Goal checker – goal_checker.hpp
- Exceptions – exceptions.hpp
여러분만의 plugin을 만들어보고 싶다면, 아래 링크를 참고하세요.
Nav2 실행 예시
- 지루한 이론을 듣느라 고생하셨습니다. 이제 src를 통해 자율 주행 예시를 함께 실행해보겠습니다.
colcon build --packages-select src_nav
source install/local_setup.bash
# Terminal 1
ros2 launch src_gazebo racecourse.launch.py use_rviz:=false
# Terminal 2
ros2 launch src_nav bringup_launch.py
- rqt_graph를 확인해봅시다.
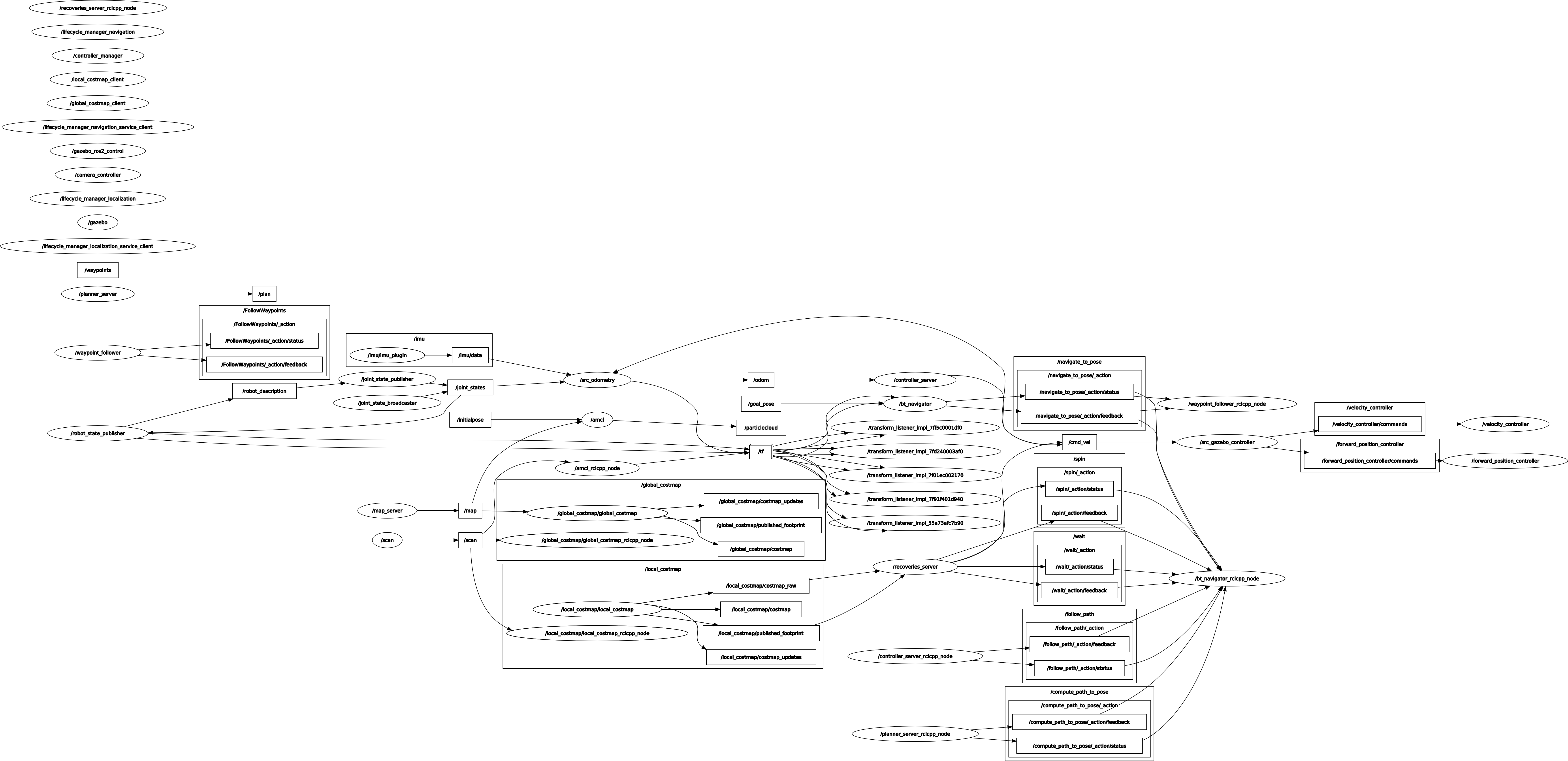
방금 우리가 실행한 launch file을 같이 살펴볼까요?
- LaunchDescription부터 살펴봅시다. 대부분 launch arguement의 선언이고 결국 실행과 관련된 것은 bringup_cmd_group 뿐입니다.
# Set environment variables
ld.add_action(stdout_linebuf_envvar)
# Declare the launch options
ld.add_action(declare_namespace_cmd)
ld.add_action(declare_use_namespace_cmd)
ld.add_action(declare_map_yaml_cmd)
ld.add_action(declare_use_sim_time_cmd)
ld.add_action(declare_slam_cmd)
ld.add_action(declare_params_file_cmd)
ld.add_action(declare_autostart_cmd)
ld.add_action(declare_bt_xml_cmd)
ld.add_action(declare_open_rviz_cmd)
# Add the actions to launch all of the navigation nodes
ld.add_action(bringup_cmd_group)
return ld
- Launch file의 실행 시 GroupAction을 통해 관련된 실행 프로그램들을 한데 묶을 수 있습니다. 이렇게 하는 이유는, 여러 로봇의 실행을 대비한 것입니다.
- IncludeLaunchDescription을 통해 4개의 launch file들을 다시 추가하고 있습니다.
# Specify the actions
bringup_cmd_group = GroupAction([
PushRosNamespace(
condition=IfCondition(use_namespace),
namespace=namespace),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(my_launch_dir, 'slam_launch.py')),
...
IncludeLaunchDescription(
# Run Localization only when we don't use SLAM
PythonLaunchDescriptionSource(os.path.join(my_launch_dir, 'localization_launch.py')),
...
IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(my_launch_dir, 'navigation_launch.py')),
...
IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(my_launch_dir, 'rviz_view_foxy_launch.py')),
...
])
- 각각의 하위 launch file은 개별 실행될 수 있도록 구성되었습니다. nav2_lifecycle_manager가 위치하고 있는 점도 확인 가능하고 node를 전달하는 방법도 알 수 있습니다.
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_localization',
output='screen',
parameters=[{'use_sim_time': use_sim_time},
{'autostart': autostart},
{'node_names': lifecycle_nodes}])
...
lifecycle_nodes = [nav2, related, nodes]
- Nav2의 최적화를 위해서는 수많은 매개변수들과 씨름해야 합니다. yaml 파일을 통해 관리되며 지금까지 살펴본 내용들이 모두 녹아들어 있습니다.
amcl:
ros__parameters:
bt_navigator:
ros__parameters:
controller_server:
ros__parameters:
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: False
local_costmap:
local_costmap:
global_costmap:
global_costmap:
map_server:
ros__parameters:
use_sim_time: False
yaml_filename: "turtlebot3_world.yaml"
map_saver:
ros__parameters:
planner_server:
ros__parameters:
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: False
recoveries_server:
ros__parameters:
robot_state_publisher:
ros__parameters:
use_sim_time: False
자율 주행 시 발생하는 상황들에 대처하기 위해 기본적으로 Behavior Tree 예시를 제공합니다. 구체적인 내용보다 Node를 작성하고 시나리오를 구성할 수 있다는 점에 집중합시다.