Lecture17. Real Hardware Examples
이번 시간에는 실제 센서 하드웨어를 실행하는 ROS 2 package들을 실행해보고, 코드 분석을 진행해보려합니다. 준비된 예시들은 다음과 같습니다.
- Intel Realsense2 D455 Camera
- Velodyne VLP16 3D lidar
- Orbbec Astra+ Camera
Intel realsense2 camera ROS 2
real hardware 강의의 두번째 시간으로 Intel의 realsense2 카메라 패키지를 실행하고, 분석해 보겠습니다.

- 예제 실행을 위해 필요한 종속성들을 설치하고 realsense sdk인 librealsense를 설치합니다.
sudo apt-get update && sudo apt-get upgrade
# Register the server's public key
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
> gpg: Total number processed: 1
# Add the server to the list of repositories
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
# Install the libraries (see section below if upgrading packages)
sudo apt-get install librealsense2-dkms -y
sudo apt-get install librealsense2-utils -y
- 실제 카메라 연결을 통해 realsense2 패키지 설치를 검증해봅시다.
# Reconnect the Intel RealSense depth camera and run
realsense-viewer
modinfo uvcvideo | grep "version:"
# should include realsense string
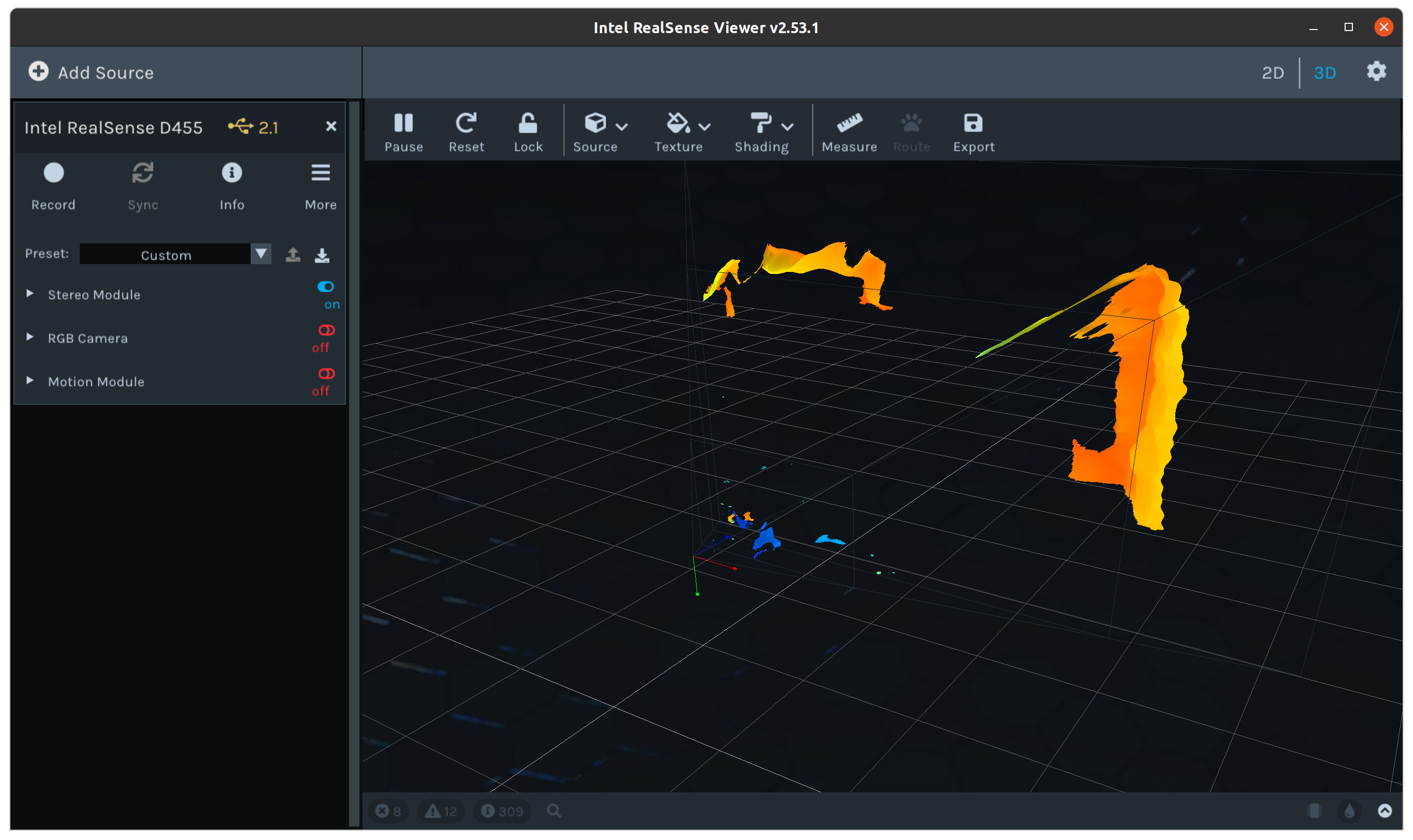
⇒ 위와 같은 이미지 출력을 얻었다면 성공입니다.
- 사실, realsense camera는 intel이 개발한 만큼 ubuntu 배포판 패키지로 ros2를 지원하고 있습니다. 사용만 하고 싶다면 아래와 같이 손쉽게 설치가 가능합니다.
# Install Dependencies
sudo apt-get install ros-foxy-cv-bridge ros-foxy-librealsense2 ros-foxy-message-filters ros-foxy-image-transport -y
sudo apt install ros-foxy-diagnostic-updater -y
sudo apt-get install -y libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install -y libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
⇒ 하지만 우리는 패키지 분석이 목적이므로 직접 소스코드 빌드와 분석을 해보겠습니다. 아래 링크를 통해 release version을 다운받고 ros2 workspace에 압축을 해제합니다.
https://github.com/IntelRealSense/realsense-ros/releases

- 폴더 이동 후 빌드는 아래 순서대로 해주세요!
cbp realsense2_camera_msgs && source install/local_setup.bash
cbp realsense2_description && source install/local_setup.bash
cbp realsense2_camera && source install/local_setup.bash
- 우선 빌드가 잘 되었는지 예시부터 실행해봅시다.
ros2 launch realsense2_camera rs_launch.py
- topic list, rviz2를 통해 정상 동작을 확인합니다.
$ ros2 topic list
/camera/color/camera_info
/camera/color/image_raw
/camera/color/metadata
/camera/depth/camera_info
/camera/depth/image_rect_raw
/camera/depth/metadata
/camera/extrinsics/depth_to_color
/camera/extrinsics/depth_to_depth
/camera/imu
/parameter_events
/rosout
/tf_static
- point cloud topic을 활성화하기 위해선 아래와 같은 launch가 필요합니다.
ros2 launch realsense2_camera rs_launch.py pointcloud.enable:=true
- rviz2를 통해 pointcloud를 시각화해봅시다. (메가커피에서 강의를 제작해서 손흥민 선수 얼굴이 보이네요 ㅎㅎ)
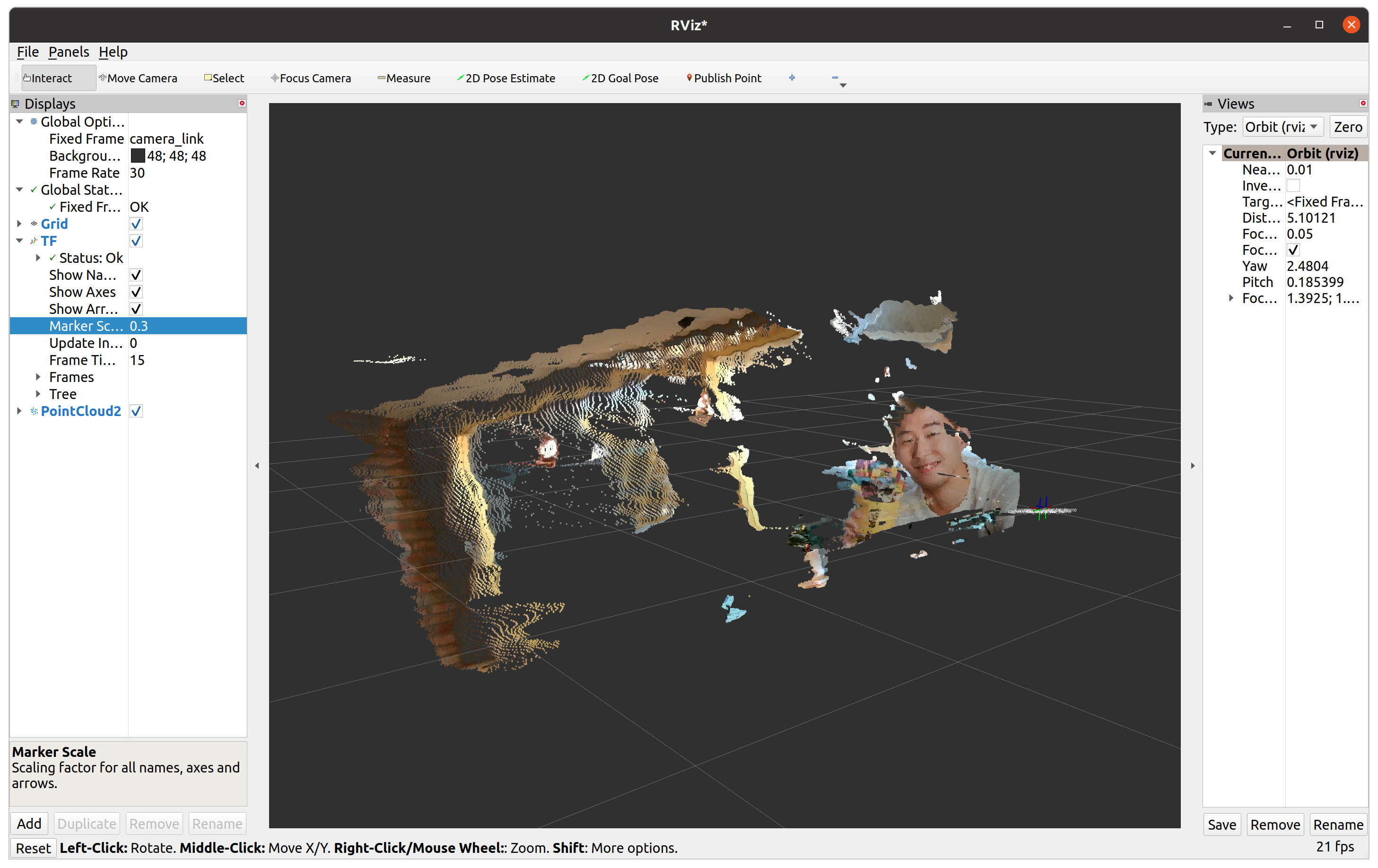
- rviz2에서 tf2 data도 확인할 수 있습니다. fixed frame은 camera_link로 두시면 됩니다.
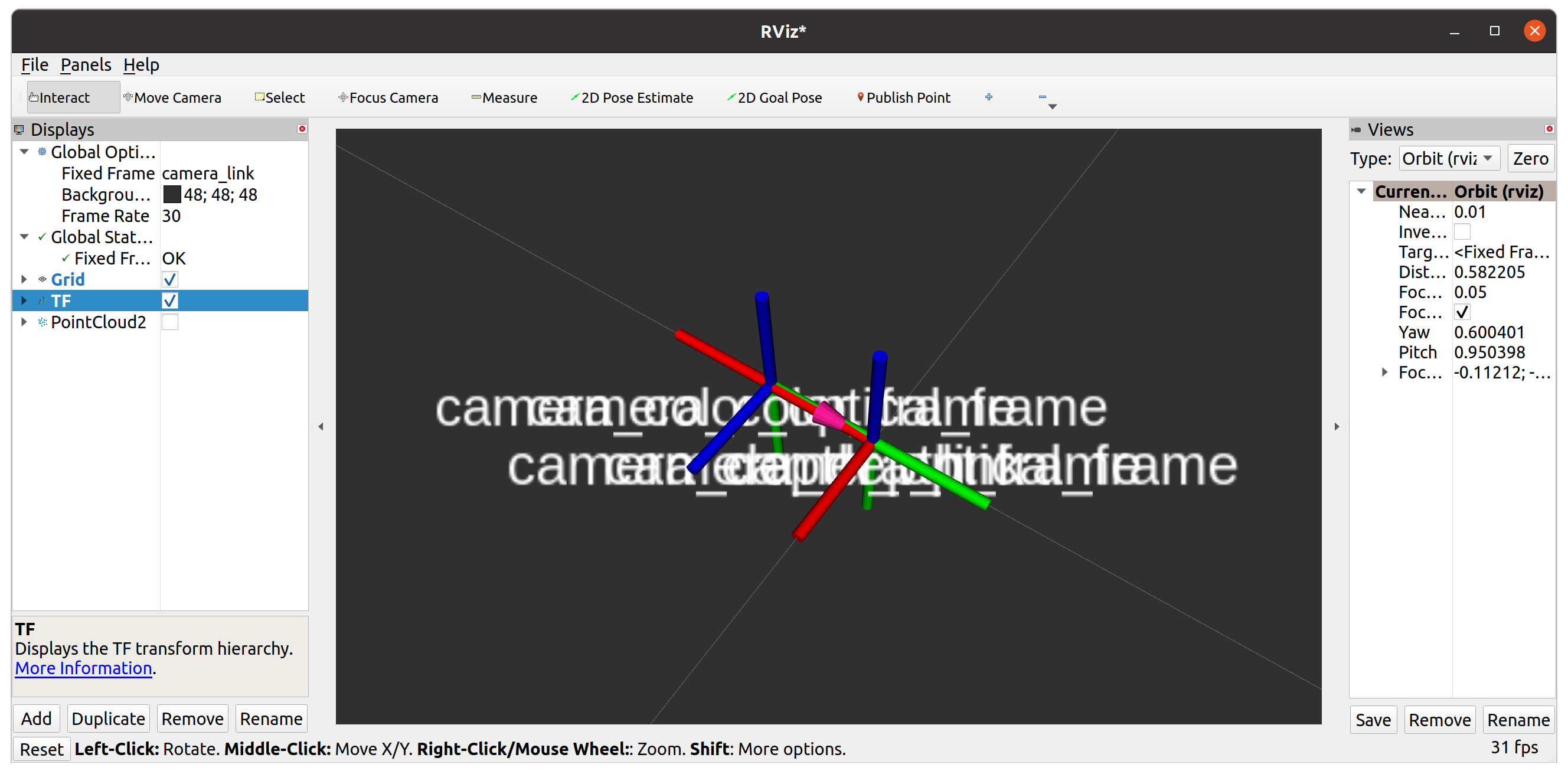
- tf2 tree도 확인해봅시다.
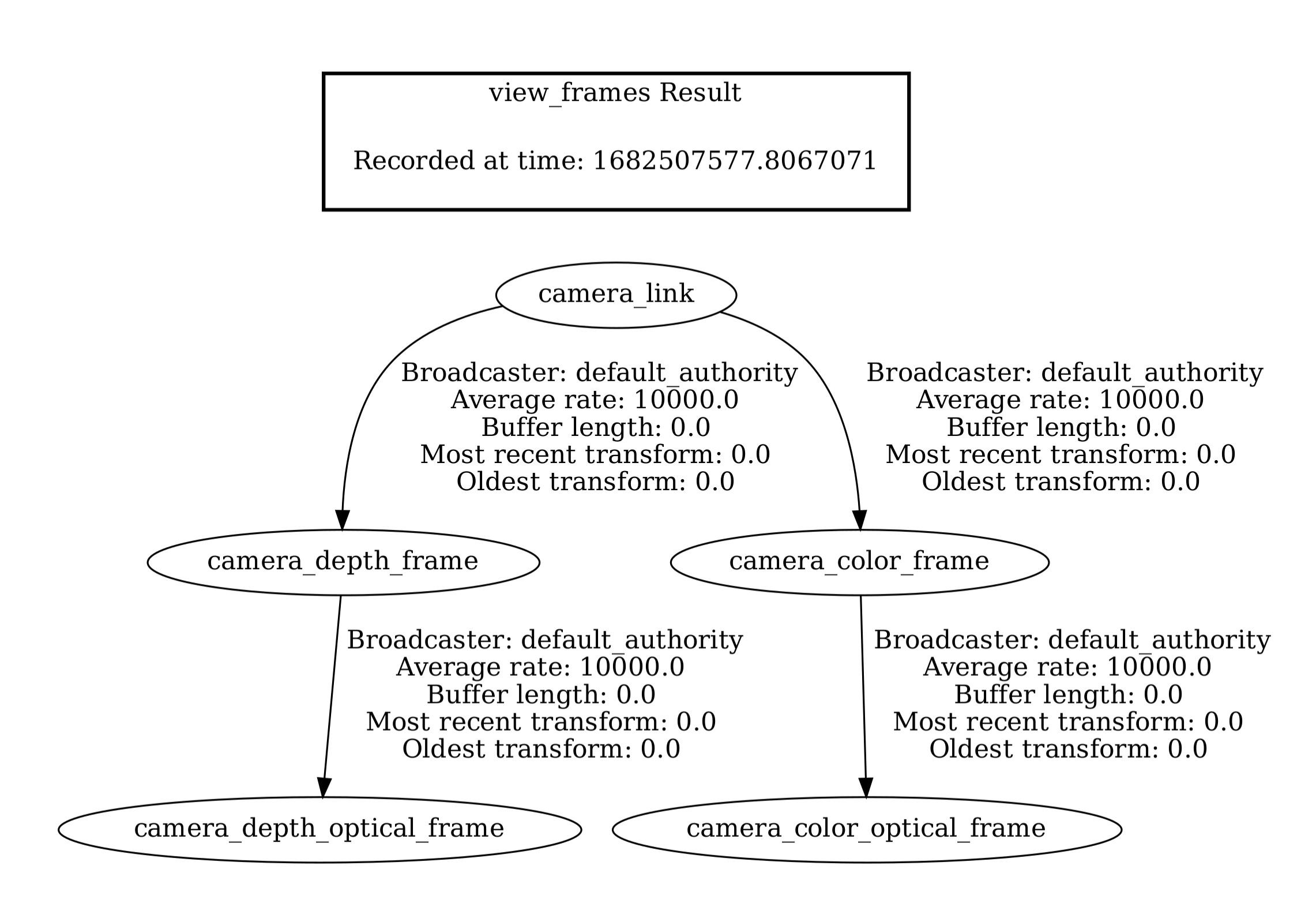
Composition launch
realsense ros2 package는 Intra-communication을 사용하여 메모리 최적화를 적용한 composition launch도 지원하고 있습니다. 이를 사용하기 위해서는 패키지 빌드를 다시 해야 하며, 이러한 이유로 저는 realsense_ws라는 별도의 workspace를 만들었습니다.
cd ~/
mkdir -p realsense_ws/src
cd realsense_ws
# locate packages & build again
colcon build --cmake-args '-DBUILD_TOOLS=ON'
- Composition 예시를 실행해봅시다!
$ ros2 launch realsense2_camera rs_intra_process_demo_launch.py
...
[component_container-1] [INFO] [1682508794.621382739] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0597926 [sec]
[component_container-1] [INFO] [1682508794.689360200] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0610729 [sec]
[component_container-1] [INFO] [1682508794.755558725] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0605604 [sec]
[component_container-1] [INFO] [1682508794.822757399] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0610629 [sec]
[component_container-1] [INFO] [1682508794.889473916] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0610784 [sec]
[component_container-1] [INFO] [1682508794.955772739] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0606767 [sec]
[component_container-1] [INFO] [1682508795.022029595] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0602304 [sec]
[component_container-1] [INFO] [1682508795.088818104] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0603308 [sec]
[component_container-1] [INFO] [1682508795.156870084] [frame_latency]: Got msg with address 0x7fe51c6cb570 with latency of 0.0616579 [sec]
[component_container-1] [INFO] [1682508795.223072425] [frame_latency]:
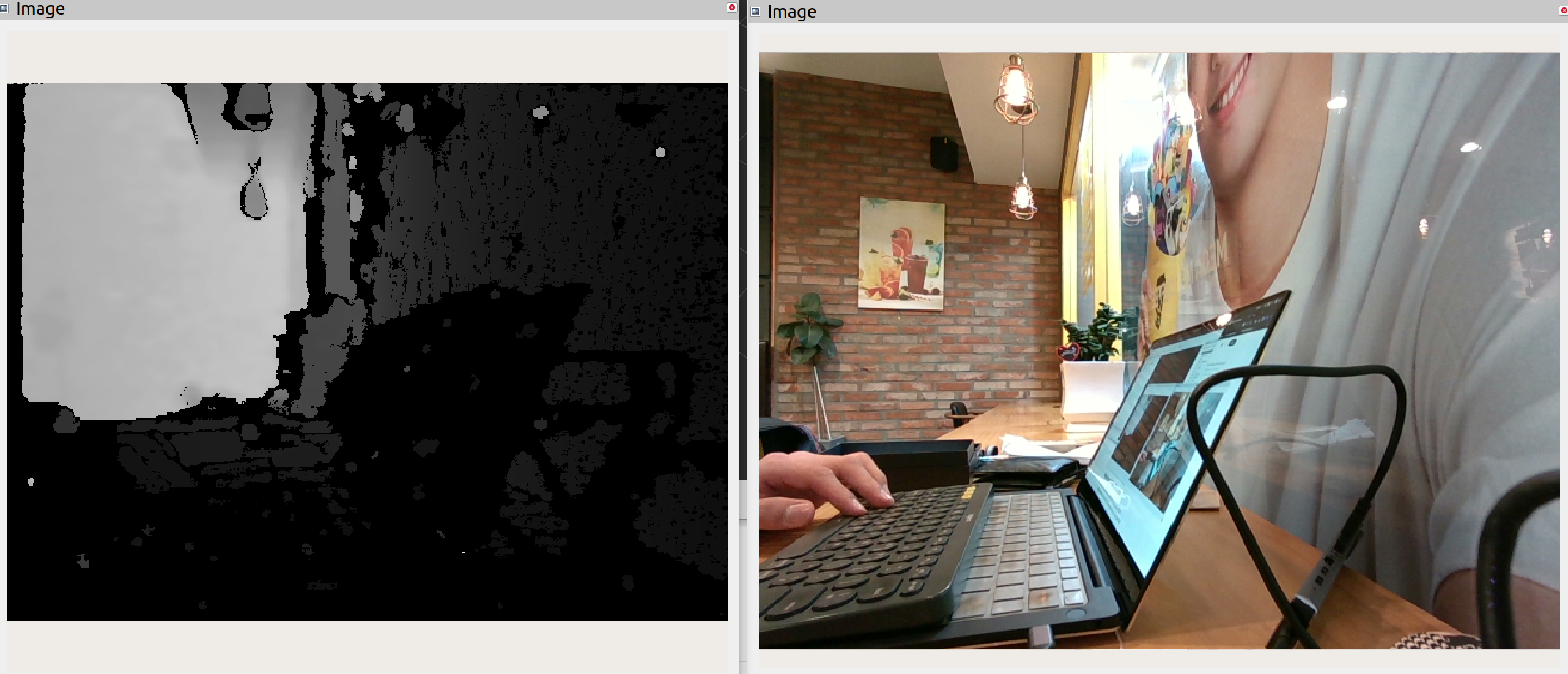
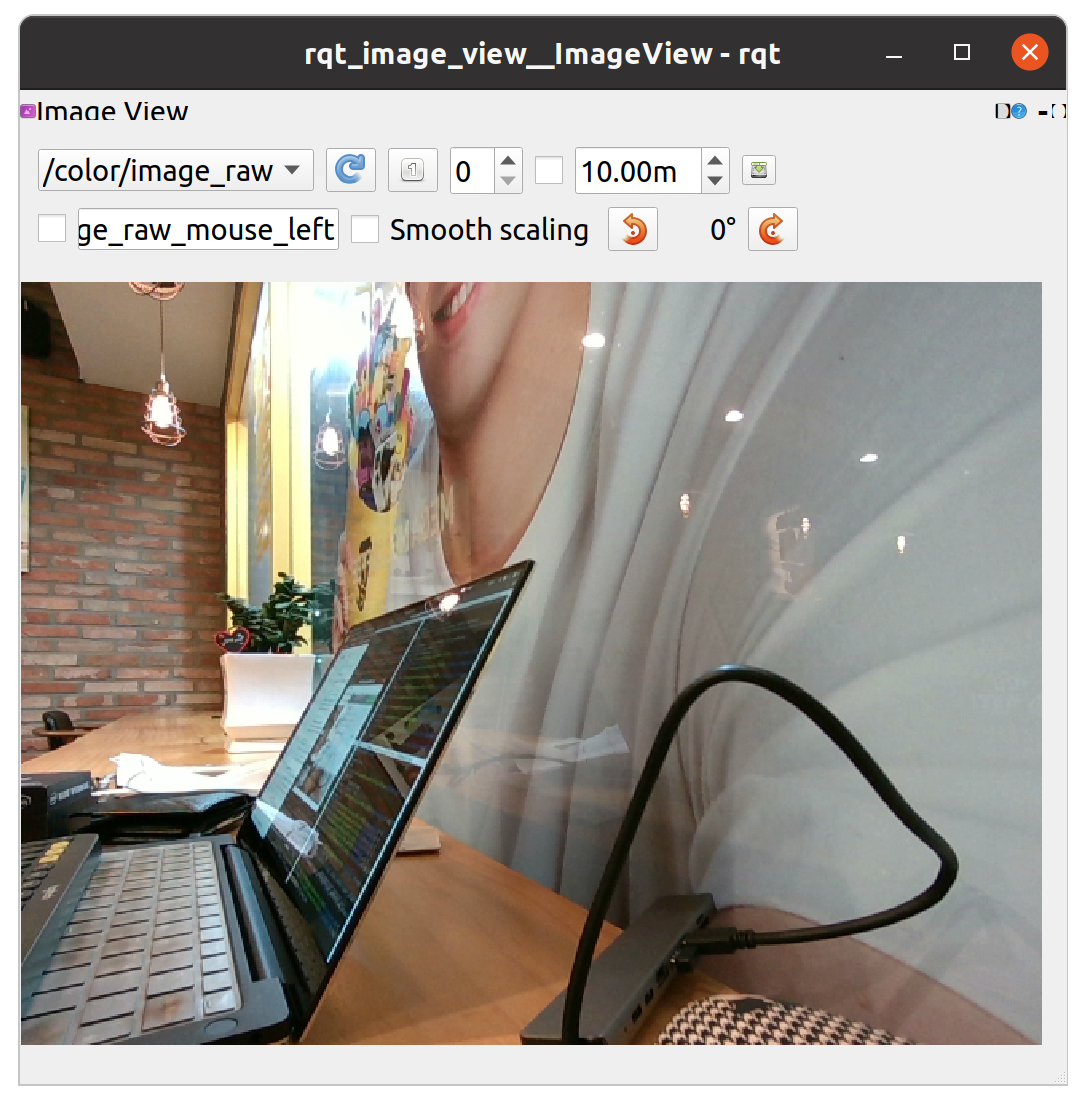
- rqt_image_view를 통해 이미지도 확인해 보겠습니다.
$ ros2 run rqt_image_view rqt_image_view
- 실제 일반 node 실행과 composition 사용 시 점유하는 메모리를 비교해 보았습니다.
PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND
2530 kimsooy+ 20 0 897252 82312 50300 R 12.3 0.5 1:09.80 x-terminal-emul
1247 kimsooy+ 20 0 6284836 344712 109988 S 11.3 2.1 7:17.14 gnome-shell
41892 kimsooy+ 20 0 1183960 85788 57140 S 5.3 0.5 0:03.28 component_conta
PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND
1247 kimsooy+ 20 0 6333092 344816 109988 S 11.6 2.1 8:00.07 gnome-shell
2530 kimsooy+ 20 0 897252 82664 50300 S 10.9 0.5 1:33.14 x-terminal-emul
42240 kimsooy+ 20 0 1457552 92104 57096 S 8.9 0.6 0:03.88 realsense2_came
노트북 환경이어 겉보기에 큰 차이는 없지만, 실제 edge device에서 실행 + 다중 Node들이 결합되는 경우 Composition 사용 여부가 큰 차이를 가질 것입니다.
realsense2 Launch file 분석
launch file과 소스코드 일부 분석을 통해 센서 패키지 개발의 흐름을 이해해봅시다.
- rs_launch.py의 시작은 수많은 launch configuration들로 시작됩니다. (
DeclareLaunchArgument,LaunchConfiguration을별도의 함수로 구현해 두고 재사용하고 있습니다.)
configurable_parameters = [{'name': 'camera_name', 'default': 'camera', 'description': 'camera unique name'},
{'name': 'serial_no', 'default': "''", 'description': 'choose device by serial number'},
{'name': 'usb_port_id', 'default': "''", 'description': 'choose device by usb port id'},
{'name': 'device_type', 'default': "''", 'description': 'choose device by type'},
...
def declare_configurable_parameters(parameters):
return [DeclareLaunchArgument(param['name'], default_value=param['default'], description=param['description']) for param in parameters]
def set_configurable_parameters(parameters):
return dict([(param['name'], LaunchConfiguration(param['name'])) for param in parameters])
- ROS 2 dashing, eloquent, foxy / 별도 user config file이 있는지 등 각종 조건에 따른 조건 분리도 설정해 두었습니다.
def generate_launch_description():
log_level = 'info'
if (os.getenv('ROS_DISTRO') == "dashing") or (os.getenv('ROS_DISTRO') == "eloquent"):
...
else:
return LaunchDescription(declare_configurable_parameters(configurable_parameters) + [
# Realsense
launch_ros.actions.Node(
condition=IfCondition(PythonExpression([LaunchConfiguration('config_file'), " == ''"])),
...
launch_ros.actions.Node(
condition=IfCondition(PythonExpression([LaunchConfiguration('config_file'), " != ''"])),
- 실제 실행되는 것은 realsense2_camera_node이며, 다음으로 이 node에 대해서 파헤쳐보겠습니다.
launch_ros.actions.Node(
package='realsense2_camera',
namespace=LaunchConfiguration("camera_name"),
name=LaunchConfiguration("camera_name"),
executable='realsense2_camera_node',
parameters=[set_configurable_parameters(configurable_parameters)
, PythonExpression([LaunchConfiguration("config_file")])
],
output='screen',
arguments=['--ros-args', '--log-level', LaunchConfiguration('log_level')],
emulate_tty=True,
)
코드 분석
CMakeLists.txt를 살펴보면 realsense2_camera_node이 어떻게 빌드된 결과물인지 확인할 수 있습니다.
rclcpp_components_register_node(${PROJECT_NAME}
PLUGIN "realsense2_camera::RealSenseNodeFactory"
EXECUTABLE realsense2_camera_node
)
그런데, 일반적으로 executable을 빌드하는 방식이 아닌 rclcpp_components_register_node라는 옵션을 사용하고 있습니다. rclcpp_components_register_node은 라이브러리, 실행 파일을 모두 생성할 수 있는 rclcpp의 CMake tools입니다. https://docs.ros2.org/latest/api/rclcpp_components/
realsense2 ROS 2 package는 ROS 1 때부터의 레거시가 잔존하고 구조상으로 깔끔하다고 말하기는 어려운 코드입니다. 분석은 하겠지만 이러한 형태가 일반적이라고 할 수 없음을 인지하시기 바랍니다! (저라면 싹다 처음부터 짤 것 같습니다.)
- realsense2_camera_node를 구성하는 composition인 RealSenseNodeFactory는 realsense_node_factory.h에 구현되어 있습니다. 디자인 패턴을 따랐다고 말할 수는 없지만, 일종의 팩토리이며 _realSenseNode가 Node에 해당합니다.
namespace realsense2_camera
{
class RealSenseNodeFactory : public rclcpp::Node
{
public:
explicit RealSenseNodeFactory(const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions());
RealSenseNodeFactory(
const std::string & node_name, const std::string & ns,
const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions());
virtual ~RealSenseNodeFactory();
private:
void init();
void closeDevice();
void startDevice();
void changeDeviceCallback(rs2::event_information& info);
void getDevice(rs2::device_list list);
void tryGetLogSeverity(rs2_log_severity& severity) const;
static std::string parseUsbPort(std::string line);
rclcpp::Node::SharedPtr _node;
rs2::device _device;
std::unique_ptr<BaseRealSenseNode> _realSenseNode;
rs2::context _ctx;
std::string _serial_no;
std::string _usb_port_id;
std::string _device_type;
double _wait_for_device_timeout;
double _reconnect_timeout;
bool _initial_reset;
std::thread _query_thread;
bool _is_alive;
rclcpp::Logger _logger;
std::shared_ptr<Parameters> _parameters;
};
}//end namespace
우선 여기서 몇가지 주요 함수들을 분석하고 더 깊이 들어가보겠습니다.
- realsense_node_factory.cpp - startDevice()
void RealSenseNodeFactory::startDevice()
{
if (_realSenseNode) _realSenseNode.reset();
std::string pid_str(_device.get_info(RS2_CAMERA_INFO_PRODUCT_ID));
uint16_t pid = std::stoi(pid_str, 0, 16);
try
{
switch(pid)
{
case SR300_PID:
case SR300v2_PID:
case RS400_PID:
case RS405_PID:
case RS410_PID:
case RS460_PID:
case RS415_PID:
case RS420_PID:
case RS420_MM_PID:
case RS430_PID:
case RS430_MM_PID:
case RS430_MM_RGB_PID:
case RS435_RGB_PID:
case RS435i_RGB_PID:
case RS455_PID:
case RS465_PID:
case RS_USB2_PID:
case RS_L515_PID_PRE_PRQ:
case RS_L515_PID:
case RS_L535_PID:
_realSenseNode = std::unique_ptr<BaseRealSenseNode>(new BaseRealSenseNode(*this, _device, _parameters, this->get_node_options().use_intra_process_comms()));
break;
case RS_T265_PID:
_realSenseNode = std::unique_ptr<T265RealsenseNode>(new T265RealsenseNode(*this, _device, _parameters, this->get_node_options().use_intra_process_comms()));
break;
default:
ROS_FATAL_STREAM("Unsupported device!" << " Product ID: 0x" << pid_str);
rclcpp::shutdown();
exit(1);
}
_realSenseNode->publishTopics();
}
catch(const rs2::backend_error& e)
{
std::cerr << "Failed to start device: " << e.what() << '\n';
_device.hardware_reset();
_device = rs2::device();
}
}
main Node인 _realSenseNode를 정의하고 있으며, 이는 사용하는 카메라 모델에 따라 차이를 갖습니다.
- _realSenseNode를 생성한 이후, publishTopics 메소드가 호출됩니다.
base_realsense_node.cpp - publishTopics()
void BaseRealSenseNode::publishTopics()
{
getParameters();
setup();
ROS_INFO_STREAM("RealSense Node Is Up!");
}
⇒ getParameters()에서는 말 그대로 각종 ROS 2 매개변수들의 파싱이 이루어집니다.
- setup() 메소드에서 주요 기능들이 실행되며 여기로 한단계 더 진입해보겠습니다.
BaseRealSenseNode::setup()
void BaseRealSenseNode::setup()
{
setDynamicParams();
startDiagnosticsUpdater();
setAvailableSensors();
SetBaseStream();
setupFilters();
setupFiltersPublishers();
setCallbackFunctions();
monitoringProfileChanges();
updateSensors();
publishServices();
}
이렇게 복잡한 구조를 갖게 된 까닭은 유추하건데 ROS 1의 레거시에서 시작했기 때문일겁니다. ⇒ ROS 1 코드에서 주요 기능들을 모두 모듈화하고 ROS 2에서는 setup()이라는 이름으로 모조리 때려넣은 것이지요. 다시 말하지만, 구조적으로 잘 구현된 코드는 아닙니다.
위 함수들 대부분은 이름을 통해 기능을 유추할 수 있으며 중요한 함수들만 몇가지 파헤쳐보겠습니다.
- setAvailableSensors
std::function<void(rs2::frame)> frame_callback_function = [this](rs2::frame frame){
bool is_filter(_filters.end() != find_if(_filters.begin(), _filters.end(), [](std::shared_ptr<NamedFilter> f){return (f->is_enabled()); }));
if (_sync_frames || is_filter)
this->_asyncer.invoke(frame);
else
frame_callback(frame);
};
std::function<void(rs2::frame)> imu_callback_function = [this](rs2::frame frame){
imu_callback(frame);
if (_imu_sync_method != imu_sync_method::NONE)
imu_callback_sync(frame);
};
std::function<void(rs2::frame)> multiple_message_callback_function = [this](rs2::frame frame){multiple_message_callback(frame, _imu_sync_method);};
std::function<void()> update_sensor_func = [this](){
{
std::lock_guard<std::mutex> lock_guard(_profile_changes_mutex);
_is_profile_changed = true;
}
_cv_mpc.notify_one();
};
각종 callback들이 구현됩니다. 현재 callback안에서 다시 callback이 실행되기도 하고, lock guard가 호출되고도 있지만, 결국 해당 callback들이 subscriber, service server의 callback으로 사용됩니다.
- 더불어, setAvailableSensors에서 librealsense와, ROS 2의 연동이 동작합니다. 이를 RosSensor라는 패턴으로 구현하여 앞서 구현한 callback들과 binding합니다.
for(auto&& sensor : _dev_sensors)
{
const std::string module_name(sensor.get_info(RS2_CAMERA_INFO_NAME));
std::unique_ptr<RosSensor> rosSensor;
if (sensor.is<rs2::depth_sensor>() ||
sensor.is<rs2::color_sensor>() ||
sensor.is<rs2::fisheye_sensor>())
{
ROS_DEBUG_STREAM("Set " << module_name << " as VideoSensor.");
rosSensor = std::make_unique<RosSensor>(sensor, _parameters, frame_callback_function, update_sensor_func, hardware_reset_func, _diagnostics_updater, _logger, _use_intra_process, _dev.is<playback>());
}
else if (sensor.is<rs2::motion_sensor>())
{
ROS_DEBUG_STREAM("Set " << module_name << " as ImuSensor.");
rosSensor = std::make_unique<RosSensor>(sensor, _parameters, imu_callback_function, update_sensor_func, hardware_reset_func, _diagnostics_updater, _logger, false, _dev.is<playback>());
}
else if (sensor.is<rs2::pose_sensor>())
{
ROS_DEBUG_STREAM("Set " << module_name << " as PoseSensor.");
rosSensor = std::make_unique<RosSensor>(sensor, _parameters, multiple_message_callback_function, update_sensor_func, hardware_reset_func, _diagnostics_updater, _logger, false, _dev.is<playback>());
}
else
{
ROS_ERROR_STREAM("Module Name \"" << module_name << "\" does not define a callback.");
throw("Error: Module not supported");
}
_available_ros_sensors.push_back(std::move(rosSensor));
}
- 생성된 rosSensor들은 _available_ros_sensors에 push_back된 후, updateSensors에서 소비됩니다.
void BaseRealSenseNode::updateSensors()
{
std::lock_guard<std::mutex> lock_guard(_update_sensor_mutex);
try{
for(auto&& sensor : _available_ros_sensors)
{
if(is_profile_changed)
{
// Start/stop sensors only if profile was changed
// No need to start/stop sensors if align_depth was changed
ROS_INFO_STREAM("Stopping Sensor: " << module_name);
sensor->stop();
}
stopPublishers(active_profiles);
if (!wanted_profiles.empty())
{
if(is_profile_changed)
{
ROS_INFO_STREAM("Starting Sensor: " << module_name);
sensor->start(wanted_profiles);
}
...
- RosSensor의 start 메소드에서 드디어 realsense sdk와의 연동이 동작하며,
\_frame_callback이라는 메모리 전달이 구현되어 있습니다.
// base_realsense_node.h
std::vector<std::unique_ptr<RosSensor>> _available_ros_sensors;
bool RosSensor::start(const std::vector<stream_profile>& profiles)
{
if (get_active_streams().size() > 0)
return false;
setupErrorCallback();
rs2::sensor::open(profiles);
for (auto& profile : profiles)
ROS_INFO_STREAM("Open profile: " << ProfilesManager::profile_string(profile));
rs2::sensor::start(_frame_callback);
...
return true;
}
...
_frame_callback = [this](rs2::frame frame)
{
runFirstFrameInitialization();
auto stream_type = frame.get_profile().stream_type();
auto stream_index = frame.get_profile().stream_index();
stream_index_pair sip{stream_type, stream_index};
try
{
_origin_frame_callback(frame);
if (_frequency_diagnostics.find(sip) != _frequency_diagnostics.end())
_frequency_diagnostics.at(sip).Tick();
}
catch(const std::exception& ex)
...
};
Publish 분석
실제 image topic이 publish 되는 부분을 추가로 분석해 보겠습니다.
- startPublishers 내부에서
image_rcl_publisher타입의 클래스 포인터가 할당됩니다.
void BaseRealSenseNode::startPublishers(const std::vector<stream_profile>& profiles, const RosSensor& sensor)
{
const std::string module_name(create_graph_resource_name(rs2_to_ros(sensor.get_info(RS2_CAMERA_INFO_NAME))));
for (auto& profile : profiles)
{
...
// We can use 2 types of publishers:
// Native RCL publisher that support intra-process zero-copy comunication
// image-transport package publisher that adds a commpressed image topic if package is found installed
if (_use_intra_process)
{
_image_publishers[sip] = std::make_shared<image_rcl_publisher>(_node, image_raw.str(), qos);
}
else
{
_image_publishers[sip] = std::make_shared<image_transport_publisher>(_node, image_raw.str(), qos);
ROS_DEBUG_STREAM("image transport publisher was created for topic" << image_raw.str());
}
...
if (_use_intra_process)
{
_depth_aligned_image_publishers[sip] = std::make_shared<image_rcl_publisher>(_node, aligned_image_raw.str(), qos);
}
else
{
_depth_aligned_image_publishers[sip] = std::make_shared<image_transport_publisher>(_node, aligned_image_raw.str(), qos);
ROS_DEBUG_STREAM("image transport publisher was created for topic" << image_raw.str());
}
_depth_aligned_info_publisher[sip] = _node.create_publisher<sensor_msgs::msg::CameraInfo>(aligned_camera_info.str(),
rclcpp::QoS(rclcpp::QoSInitialization::from_rmw(info_qos), info_qos));
}
- 참고로, _image_publishers는 아래와 같이
std::map타입의 클래스 변수이며 index_pair와 image_publisher 포인터를 담고 있습니다.
std::map<stream_index_pair, std::shared_ptr<image_publisher>> _image_publishers;
image_publisher.cpp - image_rcl_publisherimage_rcl_publisher의 publish 메소드에서 드디어 실질적인 publish가 이루어집니다. 더불어std::move를 통해 소유권을 이전하고 있습니다. (intra-processing에 대비한 것으로 보입니다.)
image_rcl_publisher::image_rcl_publisher( rclcpp::Node & node,
const std::string & topic_name,
const rmw_qos_profile_t & qos )
{
image_publisher_impl = node.create_publisher< sensor_msgs::msg::Image >(
topic_name,
rclcpp::QoS( rclcpp::QoSInitialization::from_rmw( qos ), qos ) );
}
void image_rcl_publisher::publish( sensor_msgs::msg::Image::UniquePtr image_ptr )
{
image_publisher_impl->publish( std::move( image_ptr ) );
}
...
image_transport_publisher::image_transport_publisher( rclcpp::Node & node,
const std::string & topic_name,
const rmw_qos_profile_t & qos )
{
image_publisher_impl = std::make_shared< image_transport::Publisher >(
image_transport::create_publisher( &node, topic_name, qos ) );
}
void image_transport_publisher::publish( sensor_msgs::msg::Image::UniquePtr image_ptr )
{
image_publisher_impl->publish( *image_ptr );
}
image_rcl_publisher가 사용되는 부분을 추적해 보겠습니다. BaseRealSenseNode의 frame_callback에서 다시 publishFrame callback을 호출하여 _image_publishers를 전달하고 있습니다.
void BaseRealSenseNode::frame_callback(rs2::frame frame)
{
...
publishFrame(f, t, sip,
_image,
_info_publisher,
_image_publishers);
...
publishFrame(frame_to_send, t,
DEPTH,
_image,
_info_publisher,
_image_publishers);
- 전달된 _image_publishers는 std::map type이기 때문에 rgb, depth, infra camera 중에서 indexing하여 최종 publish가 진행됩니다.
void BaseRealSenseNode::publishFrame(rs2::frame f, const rclcpp::Time& t,
const stream_index_pair& stream,
std::map<stream_index_pair, cv::Mat>& images,
const std::map<stream_index_pair, rclcpp::Publisher<sensor_msgs::msg::CameraInfo>::SharedPtr>& info_publishers,
const std::map<stream_index_pair, std::shared_ptr<image_publisher>>& image_publishers,
const bool is_publishMetadata){
auto& image_publisher = image_publishers.at(stream);
...
image_publisher->publish(std::move(img));
다시 말하지만, realsense2 ros2 코드가 완성도가 높은 것은 아닙니다. 하지만, 적어도 ROS 2시스템 차원에서 코드를 분석할 수 있는 예시가 되기에 같이 파헤쳐 보았습니다.
rs_intra_process_demo_launch.py
- Composition 예시에서 살펴본 바와 같이 launch file에서
ComposableNodeContainer를 통해 composition container를 실행하고, RealSenseNodeFactory/FrameLatencyNode composition을 load하고 있습니다.
rs_node_class= 'RealSenseNodeFactory'
rs_latency_tool_class = 'FrameLatencyNode'
...
def generate_launch_description():
return LaunchDescription(declare_configurable_parameters(configurable_parameters) + [
ComposableNodeContainer(
name='my_container',
namespace='',
package='rclcpp_components',
executable='component_container',
composable_node_descriptions=[
ComposableNode(
package='realsense2_camera',
namespace='',
plugin='realsense2_camera::' + rs_node_class,
name="camera",
parameters=[set_configurable_parameters(configurable_parameters)],
extra_arguments=[{'use_intra_process_comms': LaunchConfiguration("intra_process_comms")}]) ,
ComposableNode(
package='realsense2_camera',
namespace='',
plugin='rs2_ros::tools::frame_latency::' + rs_latency_tool_class,
name='frame_latency',
parameters=[set_configurable_parameters(configurable_parameters)],
extra_arguments=[{'use_intra_process_comms': LaunchConfiguration("intra_process_comms")}]) ,
],
output='screen',
emulate_tty=True, # needed for display of logs
arguments=['--ros-args', '--log-level', LaunchConfiguration('log_level')],
)])
RealSenseNodeFactory는 애초에 composition 형태로 개발되었으므로 실제 코드를 살펴보아도 로그를 남기는 것외에 추가 작업은 없습니다.
BaseRealSenseNode::BaseRealSenseNode(rclcpp::Node& node,
rs2::device dev,
std::shared_ptr<Parameters> parameters,
bool use_intra_process) :
...
_use_intra_process(use_intra_process),
...
{
if ( use_intra_process )
{
ROS_INFO("Intra-Process communication enabled");
}
- FrameLatencyNode는 tools ⇒ frame_latency에 구현되어 있으며, 단순히 topic publish의 지연 시간을 계산하여 콘솔 출력합니다.
FrameLatencyNode::FrameLatencyNode( const rclcpp::NodeOptions & node_options )
: Node( "frame_latency", "/", node_options )
, _logger( this->get_logger() )
{
ROS_INFO_STREAM( "frame_latency node is UP!" );
ROS_INFO_STREAM( "Intra-Process is "
<< ( this->get_node_options().use_intra_process_comms() ? "ON" : "OFF" ) );
// Create a subscription on the input topic.
_sub = this->create_subscription< sensor_msgs::msg::Image >(
"/color/image_raw", // TODO Currently color only, we can declare and accept the required
// streams as ros parameters
rclcpp::QoS( rclcpp::QoSInitialization::from_rmw( rmw_qos_profile_default ),
rmw_qos_profile_default ),
[&, this]( const sensor_msgs::msg::Image::SharedPtr msg ) {
rclcpp::Time curr_time = this->get_clock()->now();
auto latency = ( curr_time - msg->header.stamp ).seconds();
ROS_INFO_STREAM( "Got msg with address 0x"
<< std::hex << reinterpret_cast< std::uintptr_t >( msg.get() )
<< std::dec << " with latency of " << latency << " [sec]" );
} );
}
rs_multi_camera_launch.py
- rs_multi_camera_launch에서는 namespace가 지정된 rs_launch.py 2개가 실행되며, rviz2 시각화를 위해 별도로 static_transform_publisher가 실행됩니다.
local_parameters = [{'name': 'camera_name1', 'default': 'camera1', 'description': 'camera unique name'},
{'name': 'camera_name2', 'default': 'camera2', 'description': 'camera unique name'},
]
...
def generate_launch_description():
params1 = duplicate_params(rs_launch.configurable_parameters, '1')
params2 = duplicate_params(rs_launch.configurable_parameters, '2')
return LaunchDescription(
rs_launch.declare_configurable_parameters(local_parameters) +
rs_launch.declare_configurable_parameters(params1) +
rs_launch.declare_configurable_parameters(params2) +
[
IncludeLaunchDescription(
PythonLaunchDescriptionSource([ThisLaunchFileDir(), '/rs_launch.py']),
launch_arguments=set_configurable_parameters(params1).items(),
),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([ThisLaunchFileDir(), '/rs_launch.py']),
launch_arguments=set_configurable_parameters(params2).items(),
),
# dummy static transformation from camera1 to camera2
launch_ros.actions.Node(
package = "tf2_ros",
executable = "static_transform_publisher",
arguments = ["0", "0", "0", "0", "0", "0", "camera1_link", "camera2_link"]
),
])
- rs_multi_camera_launch.py에서 선언된 camera_name launch argument는 rs_launch.py로 전달되어 namespace 옵션에 추가됨과 더불어 Composotion에게 전달됩니다.
return LaunchDescription(declare_configurable_parameters(configurable_parameters) + [
# Realsense
launch_ros.actions.Node(
condition=IfCondition(PythonExpression([LaunchConfiguration('config_file'), " == ''"])),
package='realsense2_camera',
namespace=LaunchConfiguration("camera_name"),
name=LaunchConfiguration("camera_name"),
executable='realsense2_camera_node',
parameters=[set_configurable_parameters(configurable_parameters)],
output='screen',
arguments=['--ros-args', '--log-level', LaunchConfiguration('log_level')],
emulate_tty=True,
),
- parameter를 모두 관리하는 parameters.cpp에서 camera_name의 파싱을 확인할 수 있습니다.
void BaseRealSenseNode::getParameters()
{
ROS_INFO("getParameters...");
std::string param_name;
param_name = std::string("camera_name");
_camera_name = _parameters->setParam<std::string>(param_name, "camera");
_parameters_names.push_back(param_name);
realsense2 Description
description이라는 이름을 가진 패키지는 CAD, URDF 파일과 같은 물성치, 외관에 대한 데이터를 담고 있습니다. realsense의 description package를 분석해봅시다.
- 기본 launch file을 실행해 보겠으며, d455 옵션으로 실행해보겠습니다.
ros2 launch realsense2_description view_model.launch.py model:=<sth>
ros2 launch realsense2_description view_model.launch.py model:=test_d455_camera.urdf.xacro
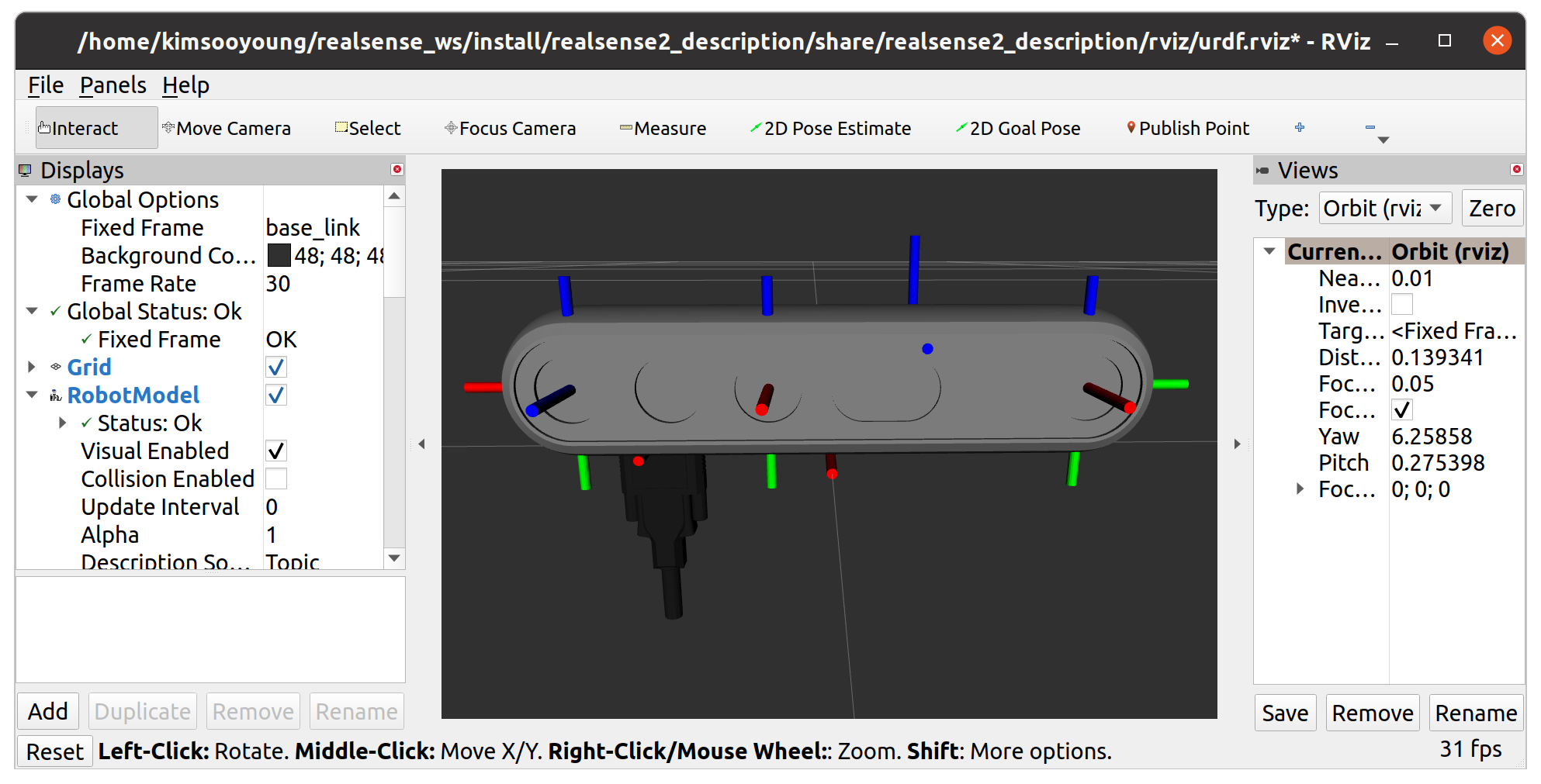
⇒ 센서 외관을 비롯하여 다양한 내장 센서들에 대한 tf2도 확인할 수 있습니다.
- tf2 tree를 통해 이에 대한 자세한 구조를 파악할 수 있으며, d455는 카메라 뿐만 아니라 가속도 센서, 자이로 센서를 포함하고 있어 아래와 같이 복잡한 구조를 갖게 됩니다.
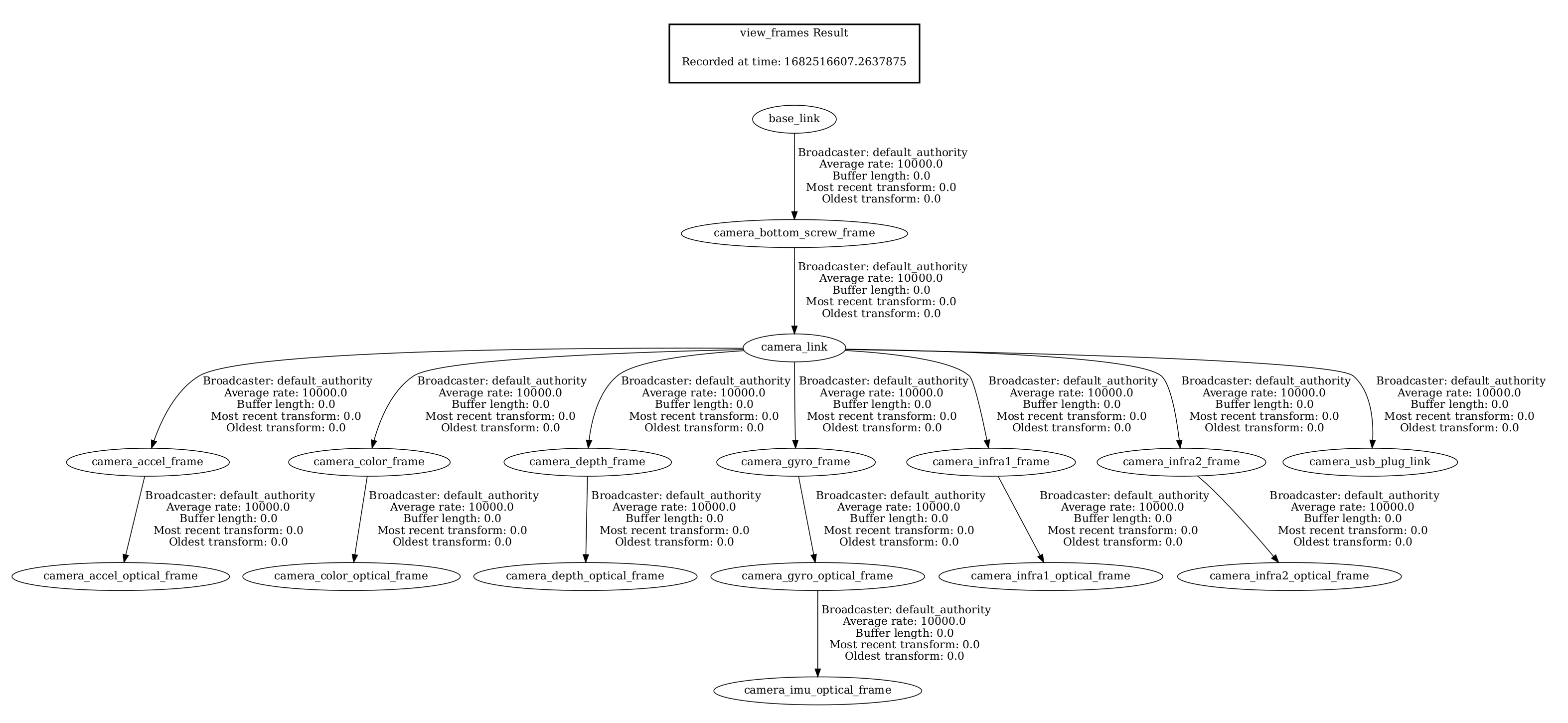
지금 tf2 tree에서는 base_link가 최상위 Node인데요. 실제 로봇 시스템에 장착 시 로봇의 base_link가 이미 존재한다면 의도치 않은 tf2 error가 발생할 수 있습니다.
- 실제 test_d455_camera.urdf.xacro 파일에서도 이를 손쉽게 제거할 수 있도록 아래와 같이 base_link를 별도 분리해둔 모습을 볼 수 있습니다.
<?xml version="1.0"?>
<robot name="realsense2_camera" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:arg name="use_nominal_extrinsics" default="false"/>
<xacro:include filename="$(find realsense2_description)/urdf/_d455.urdf.xacro" />
<link name="base_link" />
<xacro:sensor_d455 parent="base_link" use_nominal_extrinsics="$(arg use_nominal_extrinsics)">
<origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:sensor_d455>
</robot>
Description Launch file 분석
- view_model.launch.py - 실제 실행되는 Node는 robot_state_publisher와 rviz2 입니다. (센서는 움직이는 파츠가 없으니 joint_state_publisher는 굳이 필요 없겠지요?)
rviz_node = Node(
package='rviz2',
executable='rviz2',
node_name='rviz2',
output = 'screen',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': False}]
)
model_node = Node(
node_name='model_node',
package='robot_state_publisher',
executable='robot_state_publisher',
namespace='',
output='screen',
arguments = [urdf]
)
return launch.LaunchDescription([rviz_node, model_node])
robot_state_publisher의 argument로 urdf 파일들이 전달되며, 사용자로부터 mode:= 값을 받아 해당 urdf file이 실행되는 형식입니다. (저라면 Launch Argument를 사용했을 것 같습니다.)
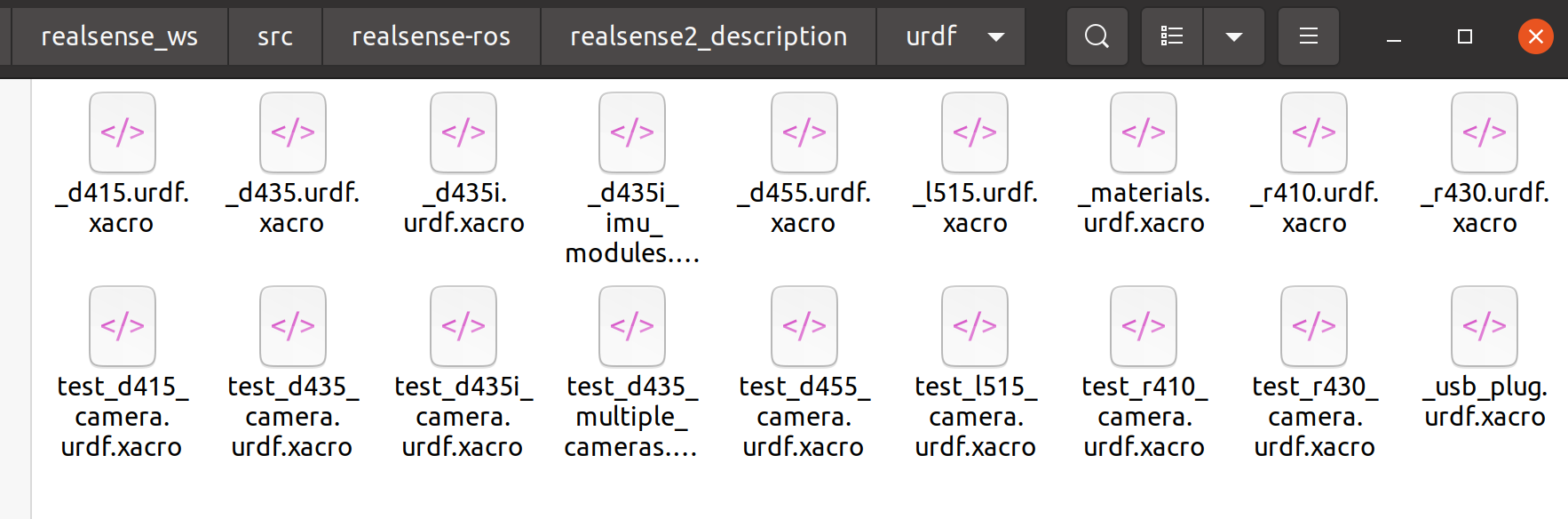
- urdf 폴더를 살펴보면, 모든 모델에 대한 기본 urdf file과, description launch를 위해 base_link가 결합된 test urdf들이 자동생성되어있는 모습을 확인할 수 있습니다.
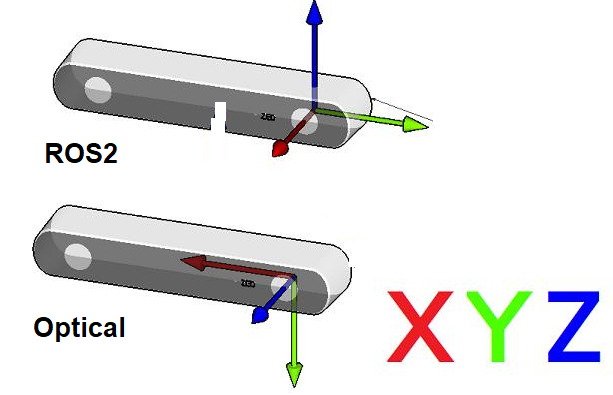
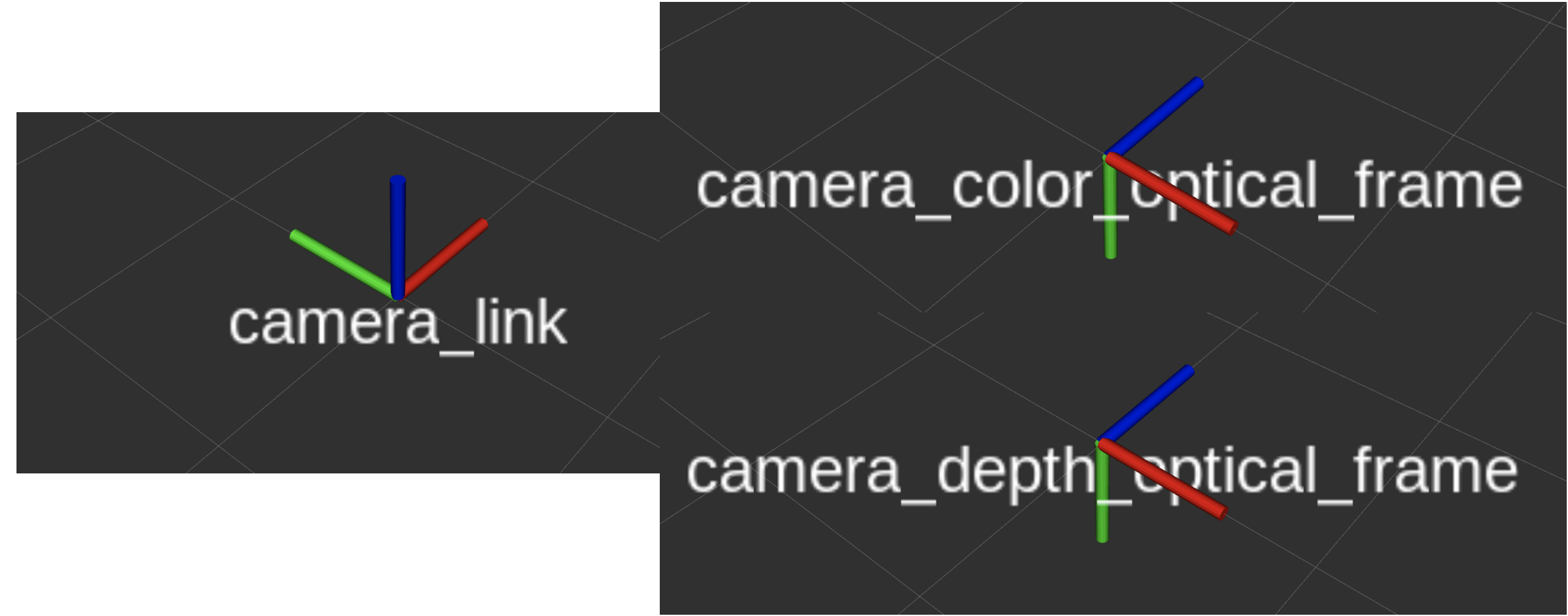
- 마지막으로 카메라 센서의 tf2 사용 시 주의할 점이 있는데요. 일반적으로 컴퓨터 비전 도메인에서 사용하는 좌표계와, ROS 2에서 사용하는 좌표계는 아래와 같이 차이를 갖습니다. gazebo plugin 시간에 살펴보았던 것처럼 rviz2를 통해 검증을 한 뒤 사용하기를 추천드립니다.
Custom Message
- 대부분 센서 패키지들은 sdk에서 정의된 자료구조와 ROS 2의 연동을 위해 custom interface를 구현합니다. realsense2에서도 IMUInfo를 비롯한 Custom Interface들을 제공하고 있습니다.
$ ros2 interface show realsense2_camera_msgs/msg/IMUInfo
# header.frame_id is either set to "imu_accel" or "imu_gyro"
# to distinguish between "accel" and "gyro" info.
std_msgs/Header header
float64[12] data
float64[3] noise_variances
float64[3] bias_variances
⇒ 이렇게 custom interface가 있다면, 다른 패키지의 종속성이 될 확률이 높이 때문에 먼저 빌드해줘야 합니다.
⇒ 더불어 custom interface는 해당 workspace에만 적용되기 때문에 workspace가 바뀌면 적용되지 않습니다.
- CMakeLists.txt를 통해 빌드되는 모든 IDL들을 확인할 수 있습니다.
set(msg_files
"msg/IMUInfo.msg"
"msg/Extrinsics.msg"
"msg/Metadata.msg"
)
rosidl_generate_interfaces(${PROJECT_NAME}
${msg_files}
"srv/DeviceInfo.srv"
DEPENDENCIES builtin_interfaces std_msgs
ADD_LINTER_TESTS
)
- 일전 이야기한 것과 같이 다른 소스코드에서 custom interface를 사용하고 있어 선행 빌드 후 소싱이 꼭 필요합니다.
#pragma once
#include <librealsense2/rs.hpp>
#include <librealsense2/rsutil.h>
#include "constants.h"
#include <cv_bridge/cv_bridge.h>
#include <diagnostic_updater/diagnostic_updater.hpp>
#include <diagnostic_updater/publisher.hpp>
#include "realsense2_camera_msgs/msg/imu_info.hpp"
#include "realsense2_camera_msgs/msg/extrinsics.hpp"
#include "realsense2_camera_msgs/msg/metadata.hpp"
#include "realsense2_camera_msgs/srv/device_info.hpp"
velodyne Lidar ROS 2 실행
이번에는 point cloud 데이터를 센싱할 수 있는 3D Lidar 중 가장 보편적으로 사용되는 VLP-16의 ROS 2 패키지를 분석해보겠습니다.

- velodyne lidar 또한 ubuntu package를 제공하고 있으며 자체적인 Gazebo package와 driver 패키지를 모두 제공합니다.
$ sudo apt install ros-foxy-velodyne-
ros-foxy-velodyne-description ros-foxy-velodyne-laserscan-dbgsym
ros-foxy-velodyne-driver ros-foxy-velodyne-msgs
ros-foxy-velodyne-driver-dbgsym ros-foxy-velodyne-msgs-dbgsym
ros-foxy-velodyne-gazebo-plugins ros-foxy-velodyne-pointcloud
ros-foxy-velodyne-gazebo-plugins-dbgsym ros-foxy-velodyne-pointcloud-dbgsym
ros-foxy-velodyne-laserscan ros-foxy-velodyne-simulator
- 이번에도 우리는 학습을 위해 소스코드 빌드를 진행하겠습니다.
cd ~/ros2_ws/src
# package clone
git clone -b foxy-devel https://github.com/ros-drivers/velodyne.git
# dependencies install
sudo apt-get update && sudo apt-get install libpcap-dev
# source code build
cbp velodyne_msgs && source install/local_setup.bash
cbp velodyne_laserscan && source install/local_setup.bash
cbp velodyne_pointcloud && source install/local_setup.bash
cbp velodyne_driver && source install/local_setup.bash
cbp velodyne && source install/local_setup.bash
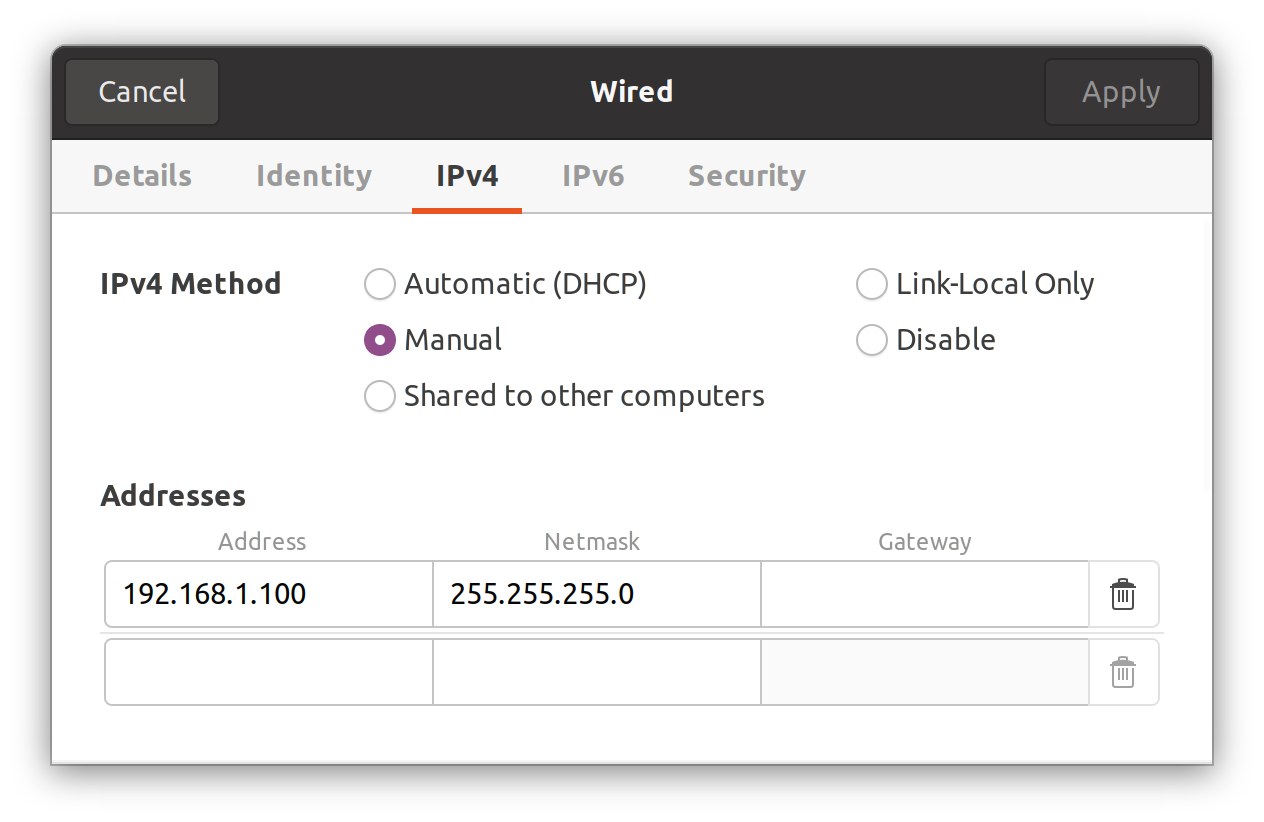
- velodyne lidar는 Ethernet 인터페이스를 제공합니다. 따라서 Ubuntu의 네트워크 설정에서 고정 IP 설정을 해주며, VLP-16의 기본 IP는 192.168.1.100입니다.
- 설정 이후 launch는 다음과 같습니다.
ros2 launch velodyne velodyne-all-nodes-VLP16-launch.py
- launch rviz2를 통한 시각화를 해봅시다. fixed frame을 velodyne으로 설정해야 합니다.
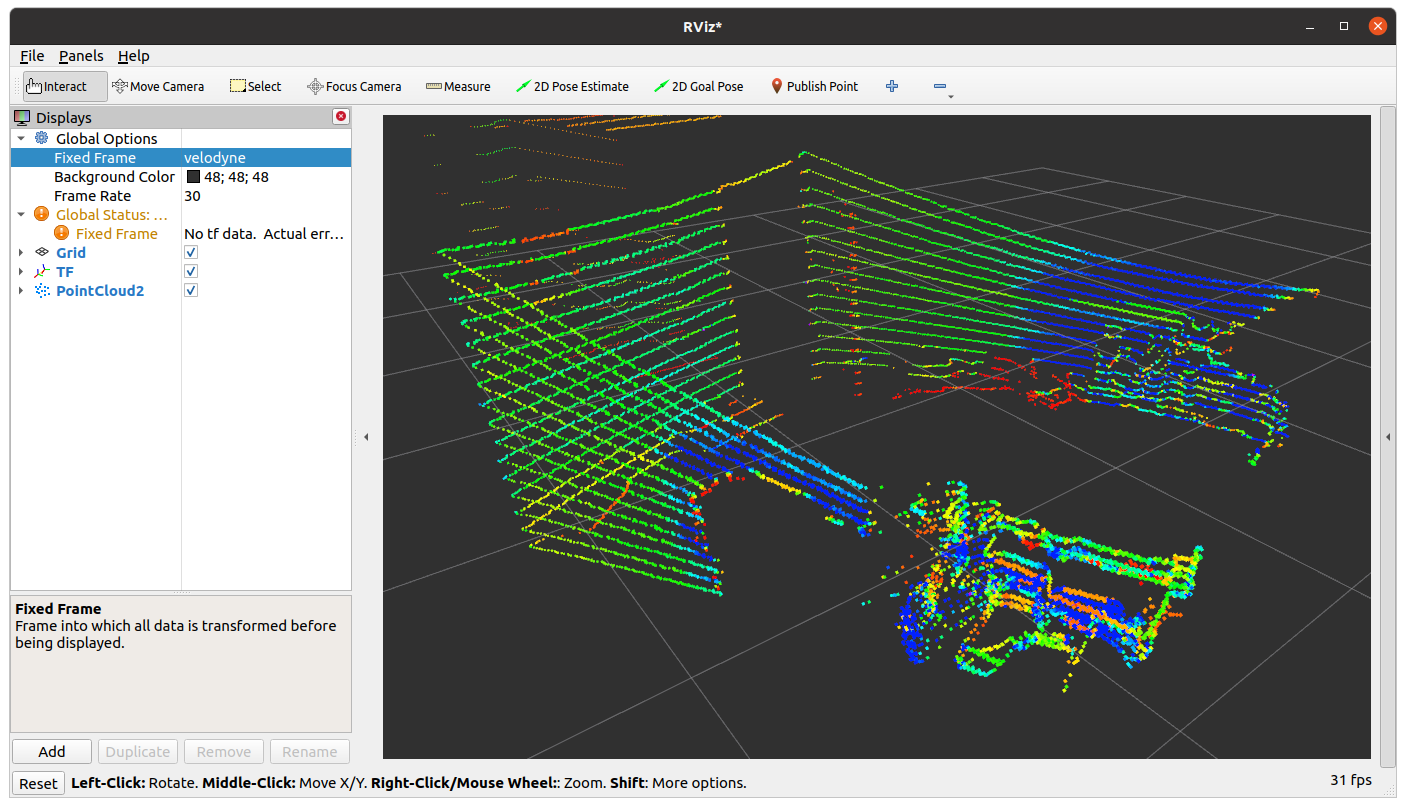
- tf2 tree를 살펴보면 아무것도 조회되지 않습니다. velodyne tf2만 broadcast되고 있기 때문에 확인할 수 없는 것입니다.
저였다면 stasic transform broadcaster를 통해 world > velodyne tf2를 하나 생성했을 것 같습니다.
- velodyne lidar 또한 composed-launch라는 comspoition 기반 실행을 지원합니다.
$ ros2 launch velodyne velodyne-all-nodes-VLP16-composed-launch.py
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/velodyne_driver_node' in container '/velodyne_container'
[component_container-1] [INFO] [1682566114.537928654] [velodyne_container]: Load Library: /home/kimsooyoung/ros2_ws/install/velodyne_pointcloud/lib/libconvert.so
[component_container-1] [INFO] [1682566114.540579179] [velodyne_container]: Found class: rclcpp_components::NodeFactoryTemplate<velodyne_pointcloud::Convert>
[component_container-1] [INFO] [1682566114.540601962] [velodyne_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<velodyne_pointcloud::Convert>
[component_container-1] [INFO] [1682566114.542606795] [velodyne_convert_node]: correction angles: /home/kimsooyoung/ros2_ws/install/velodyne_pointcloud/share/velodyne_pointcloud/params/VLP16db.yaml
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/velodyne_convert_node' in container '/velodyne_container'
[component_container-1] [INFO] [1682566114.548422161] [velodyne_container]: Load Library: /home/kimsooyoung/ros2_ws/install/velodyne_laserscan/lib/libvelodyne_laserscan.so
[component_container-1] [INFO] [1682566114.549147973] [velodyne_container]: Found class: rclcpp_components::NodeFactoryTemplate<velodyne_laserscan::VelodyneLaserScan>
[component_container-1] [INFO] [1682566114.549171818] [velodyne_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<velodyne_laserscan::VelodyneLaserScan>
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/velodyne_laserscan_node' in container '/velodyne_container'
[component_container-1] [INFO] [1682566114.597621115] [velodyne_laserscan_node]: Latched ring count of 16
[component_container-1] [WARN] [1682566114.597755427] [velodyne_laserscan_node]: PointCloud2 fields in unexpected order. Using slower generic method.
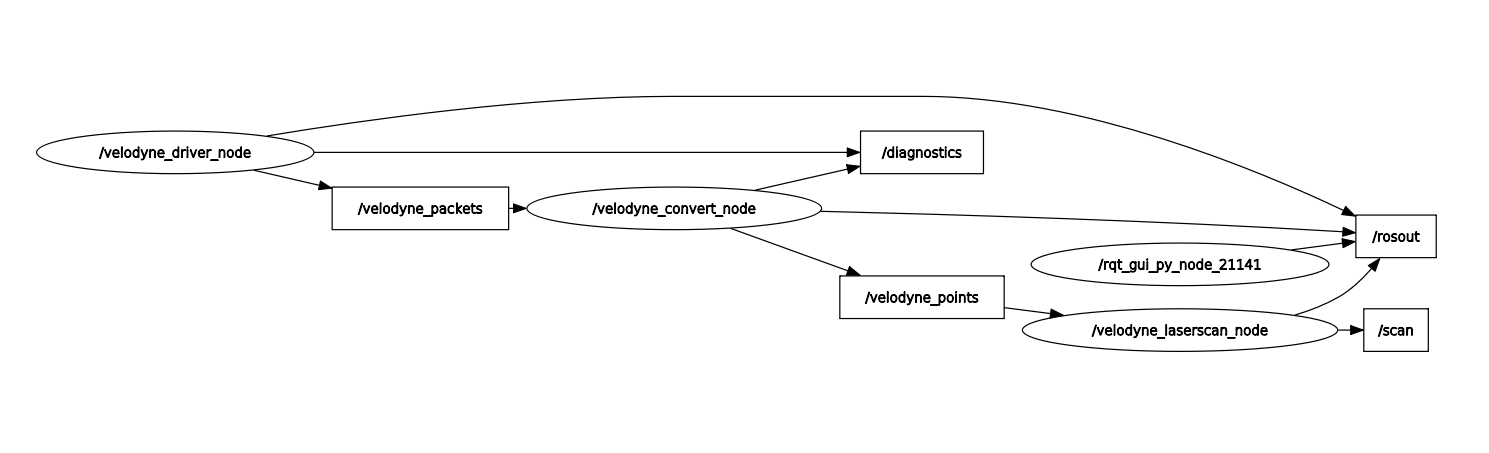
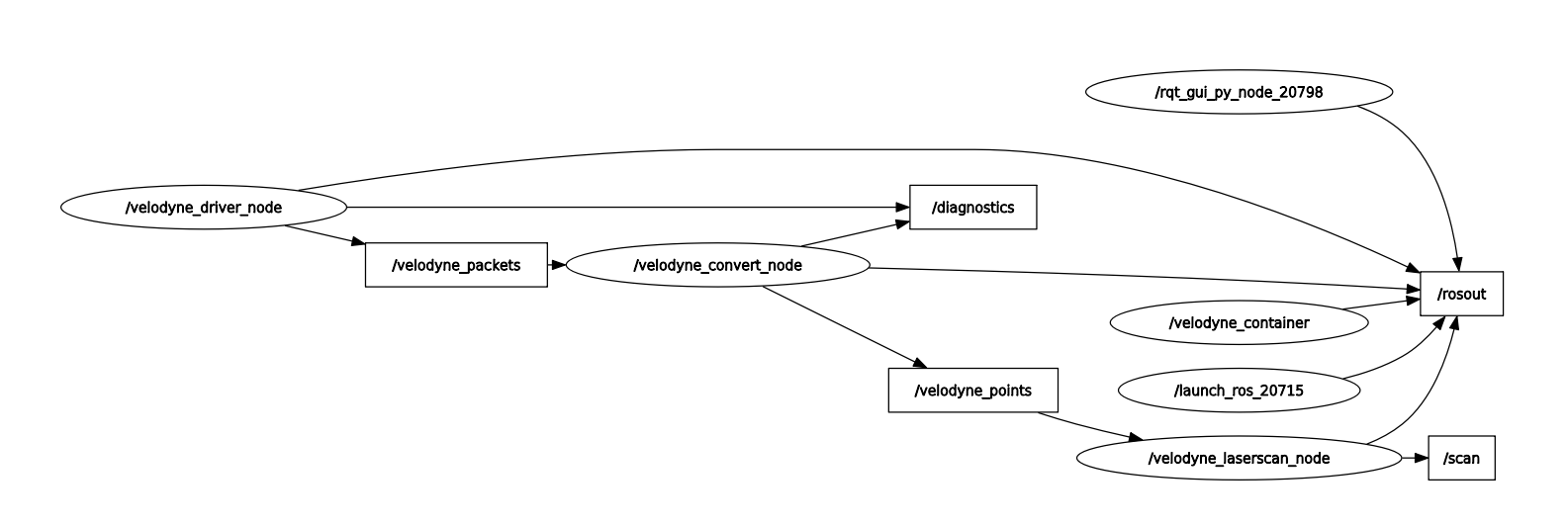
- composed-launch와 일반 launch 시 차이점을 rqt_graph로 확인해봅시다.
Launch file 분석
velodyne-all-nodes-VLP16-launch.py를 분석해봅시다. velodyne_driver_node, velodyne_convert_node, velodyne_laserscan_node이 실행되며 velodyne_driver_node의 종료 시 launch 자체가 종료되도록 Event를 걸어주었습니다.
return launch.LaunchDescription([
velodyne_driver_node,
velodyne_convert_node,
velodyne_laserscan_node,
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=velodyne_driver_node,
on_exit=[launch.actions.EmitEvent(
event=launch.events.Shutdown())],
)),
])
velodyne-all-nodes-VLP16-composed-launch.py에서는 component_container와 velodyne_driver::VelodyneDriver, velodyne_pointcloud::Convert, velodyne_laserscan::VelodyneLaserScan 3개의 composition이 동작합니다.
container = ComposableNodeContainer(
name='velodyne_container',
namespace='',
package='rclcpp_components',
executable='component_container',
composable_node_descriptions=[
ComposableNode(
package='velodyne_driver',
plugin='velodyne_driver::VelodyneDriver',
name='velodyne_driver_node',
parameters=[driver_params]),
ComposableNode(
package='velodyne_pointcloud',
plugin='velodyne_pointcloud::Convert',
name='velodyne_convert_node',
parameters=[convert_params]),
ComposableNode(
package='velodyne_laserscan',
plugin='velodyne_laserscan::VelodyneLaserScan',
name='velodyne_laserscan_node',
parameters=[laserscan_params]),
],
output='both',
)
return LaunchDescription([container])
이제 방금 전의 실행 코드들(velodyne_driver_node, velodyne_convert_node, velodyne_laserscan_node)을 분석해 봅시다.
velodyne_driver_node
- velodyne package의
CMakeLists.txt에서 velodyne_driver_node의 코드를 확인할 수 있습니다.
add_executable(velodyne_driver_node src/driver/velodyne_node.cpp)
ament_target_dependencies(velodyne_driver_node rclcpp)
target_link_libraries(velodyne_driver_node velodyne_driver)
install(TARGETS velodyne_driver_node DESTINATION lib/${PROJECT_NAME})
- velodyne_node.cpp 자체는 일반적인 rclcpp node programming이 구현되어 있습니다. (대신 NodeOptions을 매개변수로 전달하는데 이는 VelodyneDriver가 Composition형태로 구현되어 있기 때문입니다.)
#include <rclcpp/rclcpp.hpp>
#include <memory>
#include "velodyne_driver/driver.hpp"
int main(int argc, char ** argv)
{
// Force flush of the stdout buffer.
setvbuf(stdout, nullptr, _IONBF, BUFSIZ);
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<velodyne_driver::VelodyneDriver>(rclcpp::NodeOptions()));
rclcpp::shutdown();
return 0;
}
VelodyneDriver::VelodyneDriver에서는 velodyne sdk => ROS 2로의 형태 변환이 이루어집니다. Composition을 고려한 형태로 Node 프로그래밍 되어있습니다.
namespace velodyne_driver
{
class VelodyneDriver final : public rclcpp::Node
{
public:
explicit VelodyneDriver(const rclcpp::NodeOptions & options);
~VelodyneDriver() override;
...
private:
bool poll();
void pollThread();
// configuration parameters
struct config_;
...
std::unique_ptr<Input> input_;
rclcpp::Publisher<velodyne_msgs::msg::VelodyneScan>::SharedPtr output_;
int last_azimuth_;
...
};
} // namespace velodyne_driver
#endif // VELODYNE_DRIVER__DRIVER_HPP_
- velodyne sdk => ROS 2로의 데이터 형태 변환은
std::thread통해 구현되어 있습니다. ROS 2와의 충돌을 막기 위해 소멸자에서 join하는 방식을 사용하였습니다.
사실 이렇게 하면 이벤트 발생 시 다시 deadlock 문제가 발생합니다. 저라면 일전의 callback group & executor를 사용했을 것 같습니다.
std::thread poll_thread_;
// node 생성자에서 thread 시작
VelodyneDriver::VelodyneDriver(const rclcpp::NodeOptions & options)
: rclcpp::Node("velodyne_driver_node", options),
diagnostics_(this, 0.2)
{
poll_thread_ = std::thread(&VelodyneDriver::pollThread, this);
}
// thread 함수에서 무한 poll 호출
void VelodyneDriver::pollThread()
{
std::future_status status;
do {
poll();
status = future_.wait_for(std::chrono::seconds(0));
} while (status == std::future_status::timeout);
}
// poll 함수가 마치 ROS 2 callback 처럼 동작
bool VelodyneDriver::poll()
- velodyne_driver => ROS 2로의 데이터 변환을 정리해보았습니다. (poll 함수의 내용입니다.)
- velodyne driver 데이터를 std::unique_ptr input으로 파싱
- input에서 config으로 데이터 변환
- config_에서 std::unique_ptr<velodyne_msgs::msg::VelodyneScan> scan으로 데이터 변환
- output_->publish(std::move(scan));
⇒ 상당히 메모리 형변환이 잦은데 이전 코드에서의 레거시가 있는 것 같습니다.
- diagnostic_updater ⇒ 중간중간 보이는 diagnostic 관련 코드들은 ROS 2의 diagnostic_updater API로 device drivers의 여러 상태를 topic 형태로 publish할 수 있는 기능입니다.
diagnostic_updater::Updater diagnostics_;
std::unique_ptr<diagnostic_updater::TopicDiagnostic> diag_topic_;
velodyne_convert_node
rviz2에서 보았던 것처럼 제대로 된 Pointcloud topic을 위해서 velodyne_driver에서의 raw data들을 누적하고, 다시 sensor_msgs/msg/PointCloud2로 변환하는 작업이 필요합니다. velodyne_convert_node에서 이 내용이 구현되어 있습니다.
- velodyne_pointcloud package의 CMakeLists.txt에서 velodyne_convert_node의 코드를 확인할 수 있습니다.
add_executable(velodyne_convert_node src/conversions/convert_node.cpp)
ament_target_dependencies(velodyne_convert_node rclcpp)
target_link_libraries(velodyne_convert_node convert)
install(TARGETS velodyne_convert_node
DESTINATION lib/${PROJECT_NAME}
)
- convert_node.cpp 자체는 단순 Node 생성 후 spin을 담고 있습니다.
int main(int argc, char ** argv)
{
// Force flush of the stdout buffer.
setvbuf(stdout, nullptr, _IONBF, BUFSIZ);
rclcpp::init(argc, argv);
// handle callbacks until shut down
rclcpp::spin(
std::make_shared<velodyne_pointcloud::Convert>(
rclcpp::NodeOptions()));
rclcpp::shutdown();
return 0;
}
- Convert 클래스는 velodyne_msgs::msg::VelodyneScan topic을 subscribe하여 누적하고, sensor_msgs::msg::PointCloud2 topic으로 다시 publish합니다.
namespace velodyne_pointcloud
{
class Convert final
: public rclcpp::Node
{
public:
explicit Convert(const rclcpp::NodeOptions & options);
...
private:
void processScan(const velodyne_msgs::msg::VelodyneScan::SharedPtr scanMsg);
std::unique_ptr<velodyne_rawdata::RawData> data_;
rclcpp::Subscription<velodyne_msgs::msg::VelodyneScan>::SharedPtr velodyne_scan_;
rclcpp::Publisher<sensor_msgs::msg::PointCloud2>::SharedPtr output_;
tf2_ros::Buffer tf_buffer_;
std::unique_ptr<velodyne_rawdata::DataContainerBase> container_ptr_;
...
};
} // namespace velodyne_pointcloud
- velodyne_packets의 subscribe callback으로 processScan이 바인딩되어있으며, processScan에서는 일전 언급한 데이터 누적과 publish가 이루어집니다.
// subscribe to VelodyneScan packets
velodyne_scan_ =
this->create_subscription<velodyne_msgs::msg::VelodyneScan>(
"velodyne_packets", rclcpp::QoS(10),
std::bind(&Convert::processScan, this, std::placeholders::_1));
void Convert::processScan(const velodyne_msgs::msg::VelodyneScan::SharedPtr scanMsg)
{
...
// allocate a point cloud with same time and frame ID as raw data
container_ptr_->setup(scanMsg);
// process each packet provided by the driver
for (size_t i = 0; i < scanMsg->packets.size(); ++i) {
data_->unpack(scanMsg->packets[i], *container_ptr_);
}
// publish the accumulated cloud message
diag_topic_->tick(scanMsg->header.stamp);
output_->publish(container_ptr_->finishCloud());
}
- velodyne_convert_node에서 tf2 데이터를 다루는 부분이 구현되어 있습니다. 하지만 편의를 위해 별도의 컨테이너를 만들고 구현은 추상화해둔 모습을 확인할 수 있습니다.
tf2_ros::Buffer tf_buffer_;
if (organize_cloud) {
container_ptr_ = std::make_unique<OrganizedCloudXYZIR>(
min_range, max_range, target_frame, fixed_frame,
data_->numLasers(), data_->scansPerPacket(), tf_buffer_);
} else {
container_ptr_ = std::make_unique<PointcloudXYZIR>(
min_range, max_range, target_frame, fixed_frame,
data_->scansPerPacket(), tf_buffer_);
}
- DataContainerBase 클래스에서는 tf2 lookupTransform을 통해 scan data의 좌표를 미리 계산해둡니다.
std::unique_ptr<velodyne_rawdata::DataContainerBase> container_ptr_;
class DataContainerBase
{
public:
...
void computeTransformation(const rclcpp::Time & time)
{
geometry_msgs::msg::TransformStamped transform;
try {
const std::chrono::nanoseconds dur(time.nanoseconds());
std::chrono::time_point<std::chrono::system_clock, std::chrono::nanoseconds> time(dur);
transform = tf_buffer_.lookupTransform(config_.target_frame, cloud.header.frame_id, time);
} catch (tf2::LookupException & e) {
return;
} catch (tf2::ExtrapolationException & e) {
return;
}
tf2::Quaternion quaternion(
transform.transform.rotation.x,
transform.transform.rotation.y,
transform.transform.rotation.z,
transform.transform.rotation.w);
Eigen::Quaternionf rotation(quaternion.w(), quaternion.x(), quaternion.y(), quaternion.z());
Eigen::Vector3f eigen_origin;
tf2::Vector3 origin(
transform.transform.translation.x,
transform.transform.translation.y,
transform.transform.translation.z);
vectorTfToEigen(origin, eigen_origin);
Eigen::Translation3f translation(eigen_origin);
transformation = translation * rotation;
}
velodyne_laserscan_node
velodyne_laserscan_node는 sensor_msgs::msg::PointCloud2 data를 sensor_msgs::msg::LaserScan로 변환 후 /scan topic으로 publish 하는 node입니다. 3D pointcloud만 사용한다면 일반적으로 필요 없는 기능입니다.
- 클래스 header file을 통해 간단히 기능만 리뷰해봅시다.
namespace velodyne_laserscan
{
class VelodyneLaserScan final
: public rclcpp::Node
{
public:
explicit VelodyneLaserScan(const rclcpp::NodeOptions & options);
...
private:
void recvCallback(const sensor_msgs::msg::PointCloud2::SharedPtr msg);
rclcpp::Subscription<sensor_msgs::msg::PointCloud2>::SharedPtr sub_;
rclcpp::Publisher<sensor_msgs::msg::LaserScan>::SharedPtr pub_;
uint16_t ring_count_{0};
int ring_;
double resolution_;
};
} // namespace velodyne_laserscan
- PointCloud2 topic을 subscribe 받고
- 이 데이터를 LaserScan으로 변환합니다. (subscribe callback)
- 마지막으로 변환된 데이터를 scan topic으로 다시 publish합니다.
- 코드를 분석하면서 보시다시피 모든 Node 구현은 Composition을 고려하여 만들어졌습니다. 따라서 CMakeLists.txt를 보면 아래와 같이 rclcpp_components_register_nodes 키워드들을 통해 같은 코드로 Composition을 생성할 수 있습니다.
target_link_libraries(velodyne_driver velodyne_input)
# install runtime and library files
install(TARGETS velodyne_driver
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
rclcpp_components_register_nodes(velodyne_driver "velodyne_driver::VelodyneDriver")
velodyne_msgs
velodyne_msgs 패키지에는 VelodynePacket, VelodyneScan라는 두 종류의 custom message를 정의하고 있습니다. 이는 주로 velodyne 자체의 프로토콜 패킷을 다루기 위한 것으로 ROS 2 데이터 변환 시 중간 데이터 구조로 사용됩니다.
> VelodynePacket.msg
# Raw Velodyne LIDAR packet.
builtin_interfaces/Time stamp # packet timestamp
uint8[1206] data # packet contents
> VelodyneScan.msg
# Velodyne LIDAR scan packets.
std_msgs/Header header # standard ROS message header
VelodynePacket[] packets # vector of raw packets
orbbec astra camera ROS 2 패키지 분석

이번 시간에는 Orbbec Astra+ Development Kit의 ROS 2 실행과 분석을 진행해보겠습니다. 실제 사용될 카메라와 코드이므로 좀 더 자세하게 분석해보려 합니다. 이전 센서 패키지들과 비교하면서 따라와 주세요!
개발환경 설정
- 필요한 apt package들과 ROS 2 package들을 설치합니다.
sudo apt install libgflags-dev nlohmann-json3-dev
sudo apt install ros-foxy-image-transport ros-foxy-image-publisher
- 빌드 종속성인 glog을 설치합니다.
wget -c https://github.com/google/glog/archive/refs/tags/v0.6.0.tar.gz -O glog-0.6.0.tar.gz
tar -xzvf glog-0.6.0.tar.gz
cd glog-0.6.0
mkdir build && cd build
cmake .. && make -j4
sudo make install
sudo ldconfig # Refreshing the link library
- 다음으로, 빌드 종속성인 magic_enum을 설치합니다.
wget -c https://github.com/Neargye/magic_enum/archive/refs/tags/v0.8.0.tar.gz -O magic_enum-0.8.0.tar.gz
tar -xzvf magic_enum-0.8.0.tar.gz
cd magic_enum-0.8.0
mkdir build && cd build
cmake .. && make -j4
sudo make install
sudo ldconfig # Refreshing the link library
이번 실습을 위해 사용된 코드는 2022-07-15 버전 Orbbec SDK Beta for ROS입니다. ( 이후 업데이트 시 코드 변경이 있을 수 있어 명확히 명시하겠습니다. ⇒ download link)
- 다운로드 받은 source code를 원하는 workspace에 위치시킨 뒤, 개발문서에서 요구하는 usb rule 추가 작업을 진행합니다.
cd orbbec_camera/scripts
sudo bash install.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
- 해당 작업 후 혹시 모를 오류를 방지하기 위해 재부팅을 권장드리며, 카메라를 연결한 뒤 장치 인식이 되는지 확인해봅시다.
$ ls /dev | grep Astra
Astra+
Astra+_rgb
- 소스코드를 빌드하며, 공식 문서에서는 Release build를 제시하고 있어 그대로 진행해 보겠습니다.
cd ~/ros2_ws/src
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
빌드 중 오류가 발생했다면 패키지를 하나하나씩 빌드하며 원인을 분석해봅니다.
colcon build --packages-select orbbec_camera_msgs --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
source install/local_setup.bash
colcon build --packages-select orbbec_camera --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
source install/local_setup.bash
Getting started
빌드가 완료되었다면 기본 예시를 사용해봅시다.
- 제공되는 초기 코드 parameter가 아닌, default parameter를 사용하겠습니다. launch file에서 아래와 같이 parameter를 설정을 제거하고 실행합시다.
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python import get_package_share_directory
def generate_launch_description():
ob_params_file = (
get_package_share_directory("orbbec_camera") + "/params/astra_plus_params.yaml"
)
return LaunchDescription(
[
Node(
package="orbbec_camera",
namespace="camera",
name="camera",
executable="orbbec_camera_node",
output="screen",
# parameters=[ob_params_file],
),
]
)
- astra_plus.launch 예제를 실행해봅시다.
cd <my_ws>
source install/local_setup.bash
ros2 launch orbbec_camera astra_plus.launch.py
...
[orbbec_camera_node-1] [WARN] [1683197732.405664220] [camera.camera]: Using default profile instead.
[orbbec_camera_node-1] [WARN] [1683197732.405680938] [camera.camera]: default FPS 15
[orbbec_camera_node-1] [INFO] [1683197732.413525012] [camera.camera]: stream color is enabled - width: 2048, height: 1536, fps: 30, Format: OB_FORMAT_MJPG
[orbbec_camera_node-1] [WARN] [1683197732.427355527] [camera.camera]: Publishing dynamic camera transforms (/tf) at 10 Hz
custom interface들을 사용하기 때문에 workspace sourcing이 반드시 필요합니다.
- publish되고 있는 topic들은 다음과 같습니다.
$ ros2 topic list
/camera/color/camera_info
/camera/color/image_raw
/camera/depth/camera_info
/camera/depth/color/points
/camera/depth/image_raw
/camera/depth/points
/camera/extrinsic/depth_to_color
/camera/ir/camera_info
/camera/ir/image_raw
/clicked_point
/goal_pose
/initialpose
/parameter_events
/rosout
/tf
/tf_static
- 특이한 점으로, 카메라 사이 좌표계 값을 depth_to_color라는 이름의 topic으로 publish하고 있습니다.
$ ros2 topic echo --qos-durability=transient_local /camera/extrinsic/depth_to_color --qos-profile=services_default
header:
stamp:
sec: 0
nanosec: 0
frame_id: depth_to_color_extrinsics
rotation:
- 0.9999811053276062
- -0.006122155115008354
- -0.0005165112670511007
- 0.006124507170170546
- 0.9999702572822571
- 0.004682439845055342
- 0.0004878292966168374
- -0.004685514606535435
- 0.9999889135360718
translation:
- -25.19551658630371
- -0.30450138449668884
- 1.0939441919326782
---
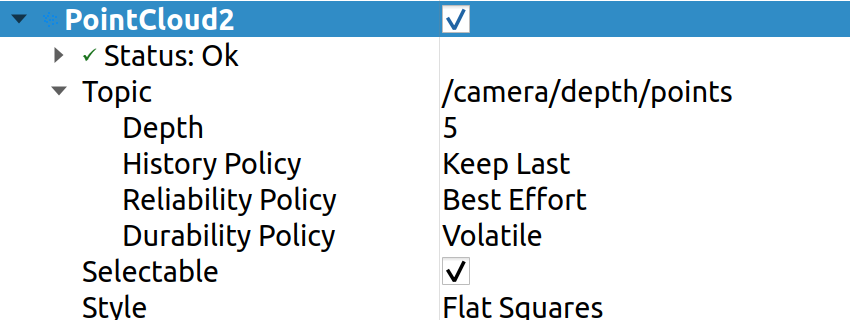
- rviz2를 통해 데이터를 시각화해봅시다.
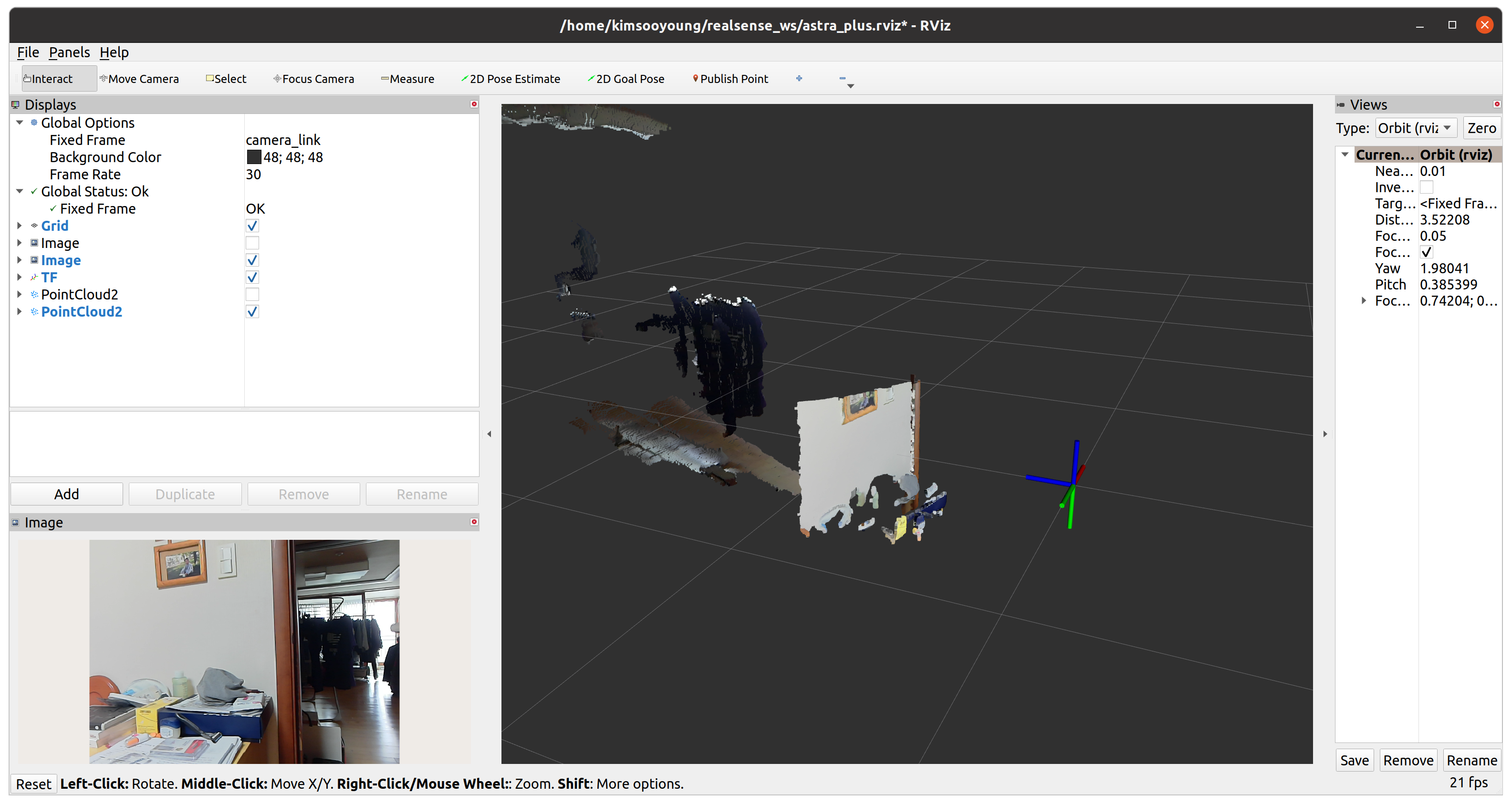
주의해야 할 점으로, pointcloud2 topic의 DDS QoS를 아래와 같이 잘 맞춰주어야 합니다.
더불어, color pointcloud2 topic의 색상을 확인하기 위해서는 rviz2 옵션을 아래와 같이 맞춰주어야 합니다.
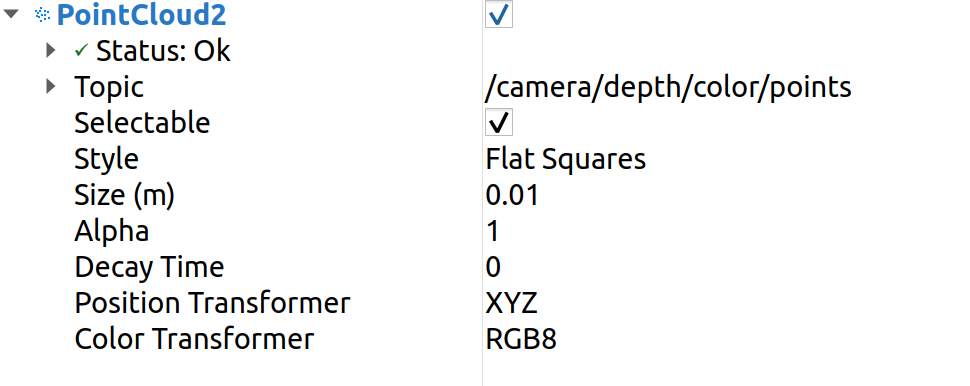
혹은, 제가 제공드리는 rviz파일을 사용하여 configuration 하셔도 좋습니다. ⇒ astra rviz download
- 카메라 센서인 만큼 tf2를 다룰 시 조심해야 할 부분이 있습니다. tf2 tree는 다음과 같습니다.
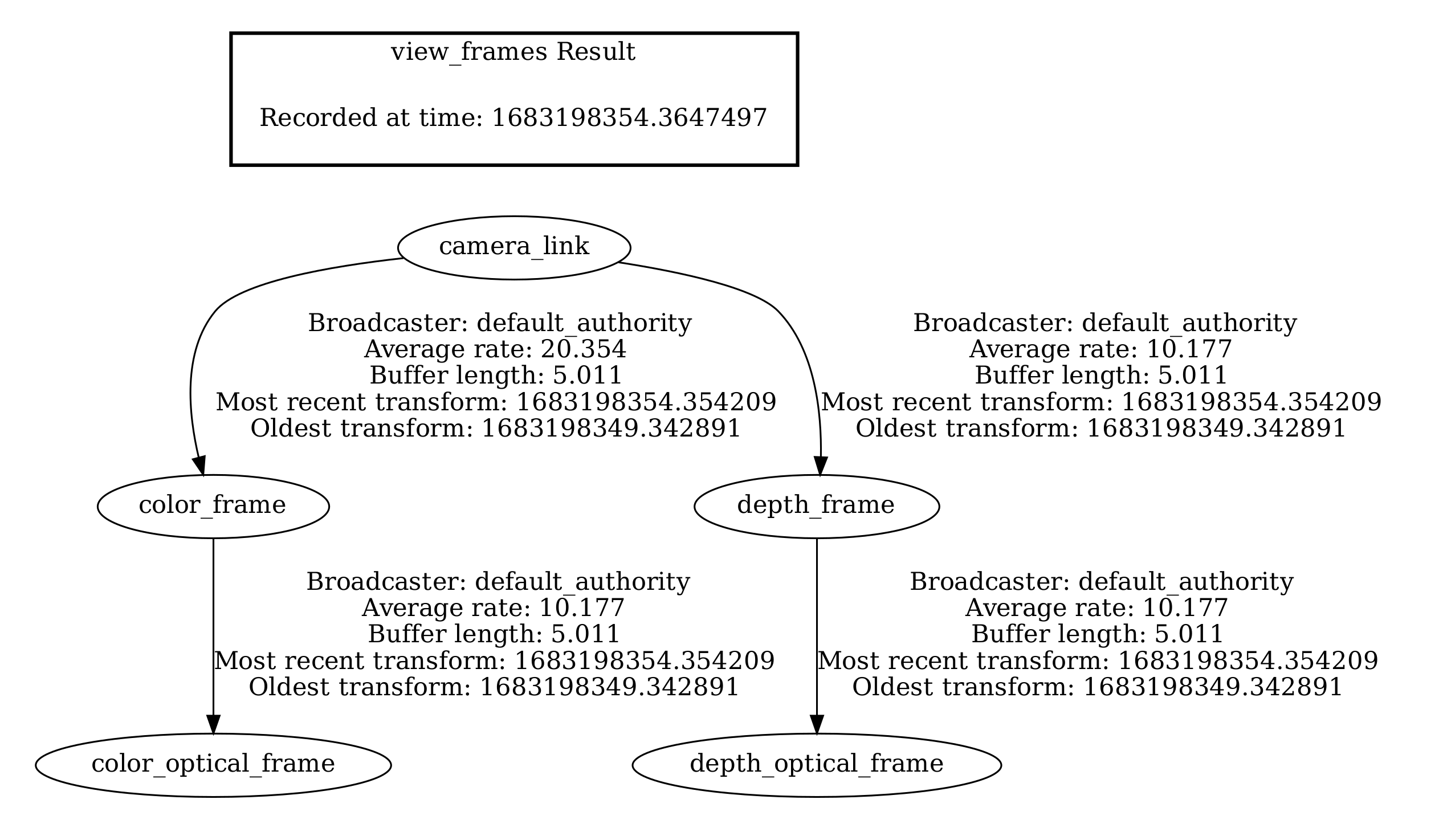
- rviz2를 통해 확인해보면, optical frame들은 회전된 camera 좌표 체계를 갖는 것을 확인 가능합니다.
- 마지막으로, astra node의 parameter들을 조회해봅시다.
$ ros2 param list
/camera/camera:
camera_link_frame_id
color_format
color_fps
color_frame_id
color_height
color_optical_frame_id
color_width
d2c_mode
...
$ ros2 param get /camera/camera color_format
String value is: YUYV
해당 parameter들에 따라 코드 실행에 어떤 변화가 있는지 분석을 통해 살펴보겠습니다.
코드 분석
- launch file을 통해 확인했던 orbbec_camera_node가 어떻게 생성되었는지 추적해봅시다.
Node(
package="orbbec_camera",
namespace="camera",
name="camera",
executable="orbbec_camera_node",
output="screen",
# parameters=[ob_params_file],
),
- CMakeLists.txt를 살펴보면 rclcpp_components_register_node를 통해 생성되는 orbbec_camera_node를 확인할 수 있습니다. (component와 executable을 모두 빌드하기 위함입니다.)
ament_target_dependencies(${PROJECT_NAME}
${dependencies}
)
rclcpp_components_register_node(${PROJECT_NAME}
PLUGIN "orbbec_camera::OBCameraNodeFactory"
EXECUTABLE orbbec_camera_node
)
- orbbec_camera_node을 구성하는 코드들은 다음과 같습니다.
add_library(${PROJECT_NAME} SHARED
src/dynamic_params.cpp
src/ob_camera_node_factory.cpp
src/ob_camera_node.cpp
src/ros_param_backend.cpp
src/ros_service.cpp
src/utils.cpp
)
- File별 기능을 분석하면 다음과 같습니다.
| Code | Description |
|---|---|
| ros_param_backend | parameter 변경 시 특정 callback이 실행되도록 binding 해주는 decorator입니다. |
| dynamic_params | ROS 2에서 제공되는 기본적인 set_parameter와 유사한 역할을 수행하는 각종 setParameter API들을 구현한 부분입니다. (아마도 별도의 parameter 변경 reject 로직을 구현하고 싶었던 것 같습니다.) |
| ob_camera_node | 일반적인 ROS 2 Node의 로직과, orbbec sdk의 pipeline을 융합하여 구현한 코드입니다. 실질적인 topic publish, service server들이 구현되어 있습니다. |
| ros_service | service server들에 대한 cpp 구현을 별도로 분리한 코드입니다. |
| ob_camera_node_factory | ob_camera_node에서 구현한 OBCameraNode node를 포인터로 갖는 별도의 Component를 구현하였습니다. (이 부분은 ROS 2 구현 측면에서 다소 미숙한 부분이라고 볼 수 있습니다.) |
주요 구현은 ob_camera_node에 작성되어 있습니다. 해당 파일 내 메소드들을 호출 계층 구조에 따라 정리하면 아래와 같습니다.
-
ob_camera_node
- Constructor
- setupTopics
- getParameters
- setupDevices
- setupProfiles
- setupDefaultStreamCalibData
- findDefaultCameraParam
- updateStreamCalibData
- setupCameraCtrlServices
- setupPublishers
- publishStaticTransforms
- startPipeline
- ob::Pipeline 실행
- frameSetCallback
- publishColorFrame
- publishDepthFrame
- publishIRFrame
- publishPointCloud
- publishColorPointCloud
- publishDepthPointCloud
- setupTopics
- Constructor
-
setupTopics에서 호출되는 함수들은 다음과 같은 역할을 갖습니다.
| Function | Description |
|---|---|
| getParameters | dynamic_params에 구현된 setParam를 사용하여 각종 매개변수들을 파싱하고, 세팅합니다. |
| setupDevices | orbbec sdk를 사용하여 camera profile, stream data등에 대한 정보를 조회하고 저장합니다. |
| setupProfiles | getParameters와 setupDevices에서 얻은 정보를 바탕으로 orbbec 카메라를 셋업합니다. d2c_mode등 orbbec만의 고유 설정들을 셋업하는 코드가 구현되어 있습니다. |
| setupDefaultStreamCalibData | 내부적으로 findDefaultCameraParam / updateStreamCalibData라는 메소드를 호출하며, 카메라 calibration data를 받아 셋업하는 부분입니다. |
| setupCameraCtrlServices | topic이 아닌 service server들에 대한 선언과 callback mapping들이 이루어집니다. |
| setupPublishers | depth/color/points, depth/points, camera_info, extrinsic/depth_to_color, image_raw 등의 topic publisher들이 선언되고 세팅됩니다. |
| publishStaticTransforms | dynamictf_broadcaster와 statictf_broadcaster라는 두개의 tf2 broadcast가 구현되어 있습니다. dynamictf_broadcaster의 경우 publishDynamicTransforms라는 메소드를 별도 thread로 실행합니다. (하지만 실제 카메라 내부에서 동적으로 변화하는 tf2는 없습니다.) |
- 대부분 설정과 관련된 구현이지만, ROS 2 구현 측면에서 setupPublishers를 살펴보겠습니다.
QoS profile을 적용한 topic publisher들과 tf broadcaster가 생성되고 있습니다.
void OBCameraNode::setupPublishers() {
static_tf_broadcaster_ = std::make_shared<tf2_ros::StaticTransformBroadcaster>(node_);
using PointCloud2 = sensor_msgs::msg::PointCloud2;
using CameraInfo = sensor_msgs::msg::CameraInfo;
point_cloud_publisher_ = node_->create_publisher<PointCloud2>(
"depth/color/points", rclcpp::QoS{1}.best_effort().keep_last(1));
depth_point_cloud_publisher_ = node_->create_publisher<PointCloud2>(
"depth/points", rclcpp::QoS{1}.best_effort().keep_last(1));
for (const auto& stream_index : IMAGE_STREAMS) {
std::string name = stream_name_[stream_index.first];
std::string topic = name + "/image_raw";
image_publishers_[stream_index] = image_transport::create_publisher(node_, topic);
topic = name + "/camera_info";
camera_info_publishers_[stream_index] =
node_->create_publisher<CameraInfo>(topic, rclcpp::QoS{1}.best_effort());
}
extrinsics_publisher_ = node_->create_publisher<orbbec_camera_msgs::msg::Extrinsics>(
"extrinsic/depth_to_color", rclcpp::QoS{1}.transient_local());
}
- publishStaticTransforms 메소드는 다음과 같습니다. dynamic transform이라는 구현이 보이는데, 사실 카메라 내부적으로는 움직이는 부분이 없습니다.
void OBCameraNode::publishStaticTransforms() {
calcAndPublishStaticTransform();
if (tf_publish_rate_ > 0) {
tf_thread_ = std::make_shared<std::thread>([this]() { publishDynamicTransforms(); });
} else {
static_tf_broadcaster_->sendTransform(static_tf_msgs_);
}
}
- 코드 확인 결과, transform의 의미보다 시간 동기화를 위해 구현해둔 것으로 보입니다.
void OBCameraNode::publishDynamicTransforms() {
RCLCPP_WARN(logger_, "Publishing dynamic camera transforms (/tf) at %g Hz", tf_publish_rate_);
std::mutex mu;
std::unique_lock<std::mutex> lock(mu);
while (rclcpp::ok() && is_running_) {
tf_cv_.wait_for(lock, std::chrono::milliseconds((int)(1000.0 / tf_publish_rate_)),
[this] { return (!(is_running_)); });
{
rclcpp::Time t = node_->now();
for (auto& msg : static_tf_msgs_) {
msg.header.stamp = t;
}
dynamic_tf_broadcaster_->sendTransform(static_tf_msgs_);
}
}
}
- startPipeline에서 호출되는 함수들은 다음과 같은 역할을 갖습니다.
| Function | Description |
|---|---|
| ob::Pipeline 실행 | orbbec sdk로부터 pipeline을 다루는 핸들러를 받아 image stream을 시작합니다. |
| frameSetCallback | setupPublishers에서 설정한 각종 topic publisher들이 실질적인 topic publish를 수행하는 부분입니다. |
- 코드를 확인해보면, orbbec SDK의 pipeline을 실행한 뒤, frame callback과 binding하고 있는 모습을 확인 가능합니다.
void OBCameraNode::startPipeline() {
if (pipeline_ != nullptr) {
pipeline_.reset();
}
pipeline_ = std::make_unique<ob::Pipeline>(device_);
pipeline_->start(config_, [this](std::shared_ptr<ob::FrameSet> frame_set) {
frameSetCallback(std::move(frame_set));
});
}
- frame이 갱신될 떄마다 실행되는 frameSetCallback에서는 갱신된 이미지 데이터를 사용하여 각종 topic publish를 진행합니다.
void OBCameraNode::frameSetCallback(std::shared_ptr<ob::FrameSet> frame_set) {
auto color_frame = frame_set->colorFrame();
auto depth_frame = frame_set->depthFrame();
auto ir_frame = frame_set->irFrame();
if (color_frame && enable_[COLOR]) {
publishColorFrame(color_frame);
}
if (depth_frame && enable_[DEPTH]) {
publishDepthFrame(depth_frame);
}
if (ir_frame && enable_[INFRA0]) {
publishIRFrame(ir_frame);
}
publishPointCloud(frame_set);
}
- publishColorFrame / publishDepthFrame / publishIRFrame에서는 cv::Mat 형식의 데이터를 ROS 2 Image msg로 변환하여 publish하고 있습니다.
void OBCameraNode::publishColorFrame(std::shared_ptr<ob::ColorFrame> frame) {
...
sensor_msgs::msg::Image::SharedPtr img;
img = cv_bridge::CvImage(std_msgs::msg::Header(), encoding_.at(stream), image).toImageMsg();
img->width = width;
img->height = height;
img->is_bigendian = false;
img->step = width * unit_step_size_[stream];
img->header.frame_id = optical_frame_id_[COLOR];
img->header.stamp = timestamp;
auto& image_publisher = image_publishers_.at(stream);
image_publisher.publish(img);
}
- publishPointCloud에서는 특정 조건에 따라 color pointcloud, depth point cloud를 준비시킵니다. 이 부분 때문에 parameter설정이 중요합니다.
void OBCameraNode::publishPointCloud(std::shared_ptr<ob::FrameSet> frame_set) {
try {
if (align_depth_ && (format_[COLOR] == OB_FORMAT_YUYV || format_[COLOR] == OB_FORMAT_I420)) {
if (frame_set->depthFrame() != nullptr && frame_set->colorFrame() != nullptr) {
publishColorPointCloud(frame_set);
}
}
if (frame_set->depthFrame() != nullptr) {
publishDepthPointCloud(frame_set);
}
- pointcloud를 publish하는 로직을 살펴보면 공통적으로 아래와 같은 iterator 구현을 확인할 수 있습니다. 이는 ROS 2의 PointCloud2 type에서 제공하는 API로 손쉽게 각 point data를 append 할 수 있습니다.
...
sensor_msgs::PointCloud2Iterator<float> iter_x(point_cloud_msg_, "x");
sensor_msgs::PointCloud2Iterator<float> iter_y(point_cloud_msg_, "y");
sensor_msgs::PointCloud2Iterator<float> iter_z(point_cloud_msg_, "z");
size_t valid_count = 0;
for (size_t point_idx = 0; point_idx < point_size; point_idx++, points++) {
bool valid_pixel(points->z > 0);
if (valid_pixel) {
*iter_x = static_cast<float>(points->x / 1000.0);
*iter_y = -static_cast<float>(points->y / 1000.0);
*iter_z = static_cast<float>(points->z / 1000.0);
++iter_x;
++iter_y;
++iter_z;
++valid_count;
}
}
- 마지막으로 ros_service.cpp 코드에는 각종 설정을 service로 제어할 수 있는 로직이 구현되어 있습니다. 자세한 내용을 살펴보지는 않겠지만, service server를 설정하고 binding되는 callback을 구현하는 부분이 반복됩니다.
service_name = "set_" + stream_name + "_exposure";
set_exposure_srv_[stream_index] = node_->create_service<SetInt32>(
service_name,
[this, stream_index = stream_index](const std::shared_ptr<SetInt32::Request> request,
std::shared_ptr<SetInt32::Response> response) {
setExposureCallback(request, response, stream_index);
});
...
void OBCameraNode::setExposureCallback(const std::shared_ptr<SetInt32::Request>& request,
std::shared_ptr<SetInt32::Response>& response,
const stream_index_pair& stream_index) {
auto stream = stream_index.first;
...
- OBCameraNodeFactory는 OBCameraNode, ob::Device, ob::DeviceInfo 인스턴스를 스마트 포인터로 포함하고 있습니다. 대부분의 구현들도 해당 스마트 포인터 내부의 메소드를 호출하는 식으로 구성됩니다.
void init();
void startDevice();
void getDevice(const std::shared_ptr<ob::DeviceList>& list);
void updateDeviceInfo();
void deviceConnectCallback(const std::shared_ptr<ob::DeviceList>& device_list);
void deviceDisconnectCallback(const std::shared_ptr<ob::DeviceList>& device_list);
void printDeviceInfo(const std::shared_ptr<ob::DeviceInfo>& device_info);
std::unique_ptr<OBCameraNode> ob_camera_node_;
std::shared_ptr<ob::Device> device_;
std::shared_ptr<ob::DeviceInfo> device_info_;
이 부분은 구조적으로 다소 비효율적이라고 생각합니다. orbbec 관련 인스턴스를 클래스 변수로 갖는 것은 이해가 되지만, 저라면 Node를 스마트 포인터로 갖지 않고, Composition 형태로 바로 구현했을 것 같습니다.
orbbec astra plus model의 ROS 2 패키지 분석을 끝으로 모든 예시 분석을 마쳤습니다. 실제 ROS 2 package 개발에 대한 안목이 생기셨으리라 생각합니다.
orbbec gemini 2 ROS 2 패키지 분석
이번에는 Orbbec의 또다른 rgbd camera인 Gemini 2를 ROS 2 연동해보겠습니다.
일전 Astra Plus를 분석하며 종속성 설치 등 많은 부분을 이미 해두었으므로 중복되는 설정은 제외하였습니다.

- Astra Plus package와 Gemini 2 package의 이름이 동일합니다! 따라서 새로운 Workspace를 생성한 뒤 별도 빌드를 해주겠습니다.
cd ~/
mkdir -p gemini_ws/src
cd ~/gemini_ws
colon build
만약 두 package를 같은 workspace에서 사용하고 싶다면 소스코드에서 패키지 이름을 모조리 찾아내 변경하면 됩니다.
- Gemini2의 인식을 위해 udev-rules를 다시 수정해야 합니다. udev-rules에 대한 설명은 링크로 대체하겠으며, 여러분들께서는 하단 터미널 명령어를 따라하시기만 하면 됩니다.
cd /etc/udev/rules.d
sudo rm -rf 99-obsensor-libusb.rules
- 이제 새로운 udev-rules를 추가해야 합니다. 하지만 Orbbec에서 제공하는 rule이 적절치 않아 이번 예시를 위해 일부 제가 수정하였습니다. ⇒
OrbbecSDK_ROS2/orbbec_camera/scripts99-obsensor-libusb.rules수정
# UVC Modules
...
SUBSYSTEMS=="usb", ATTRS{idVendor}=="2bc5", ATTRS{idProduct}=="0670", MODE:="0666", OWNER:="root", GROUP:="video", SYMLINK+="orbbec_gemini_2"
- 새로운 rule을 로컬 환경에 적용합시다.
cd <your-ws>/OrbbecSDK_ROS2/orbbec_camera/scripts
sudo bash install.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
- 이제 Gemini2를 연결하면 아래와 같이 인식되는 모습을 볼 수 있습니다.
cd /dev
ls | grep gem
>> result
orbbec_gemini_2
- 예시 실행 전, color point cloud를 보고 싶다면
gemini2.launch.xml파일의 parameter를 아래와 같이 수정해야 합니다.
<launch>
<!-- unique camera name-->
<arg name="camera_name" default="camera"/>
<!-- Hardware depth registration -->
<arg name="depth_registration" default="false"/>
<arg name="serial_number" default=""/>
<arg name="device_num" default="1"/>
<arg name="vendor_id" default="0x2bc5"/>
<arg name="product_id" default=""/>
<arg name="enable_point_cloud" default="true"/>
<!-- from -->
<!-- <arg name="enable_colored_point_cloud" default="false"/> -->
<!-- to -->
<arg name="enable_colored_point_cloud" default="True"/>
<arg name="point_cloud_qos" default="default"/>
- 패키지를 빌드하고 소싱합시다.
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
source install/local_setup.bash
- gemini2 launch를 실행하고, rviz2로 시각화해봅시다.
# Terminal 1
ros2 launch orbbec_camera gemini2.launch.xml
# Terminal 2
rviz2
여러분들이 직접 rviz2 구성을 해보셔도 좋고, 제가 제공드리는 파일을 사용하셔도 됩니다!
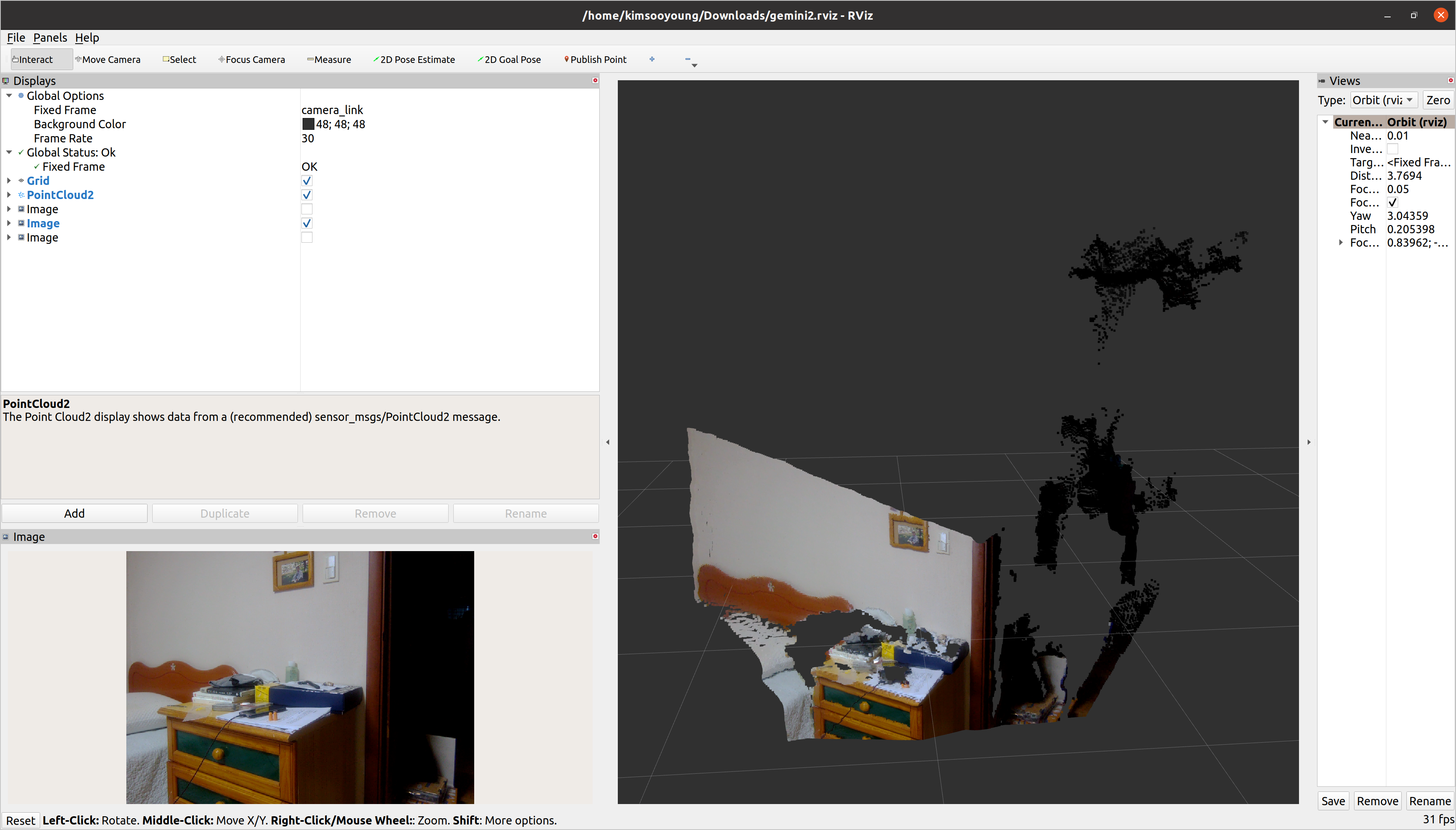
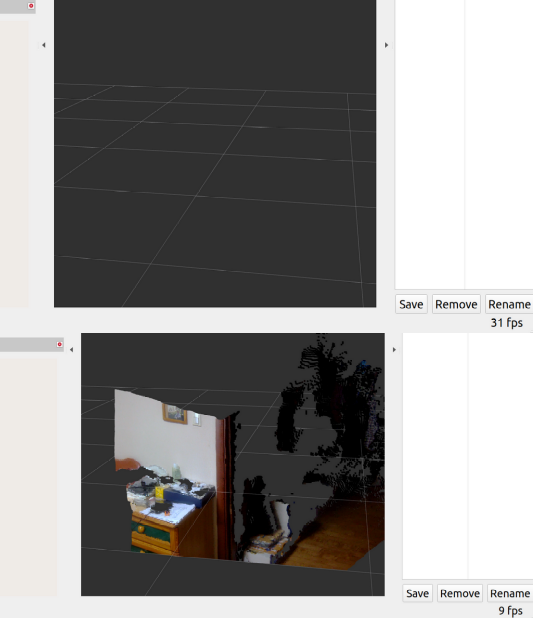
노트북, Edge Device 사용 시, color point cloud 시각화를 실행하면 급격히 성능이 저하될 수 있습니다. (우측 하단 frame rate를 확인해보세요!)
- 예제 실행 시 동작하는 topic list, tf2 tree는 다음과 같습니다.
$ ros2 topic list
/color/camera_info
/color/image_raw
/depth/camera_info
/depth/color/points
/depth/image_raw
/depth/points
/ir/camera_info
/ir/image_raw
/parameter_events
/rosout
/tf
/tf_static
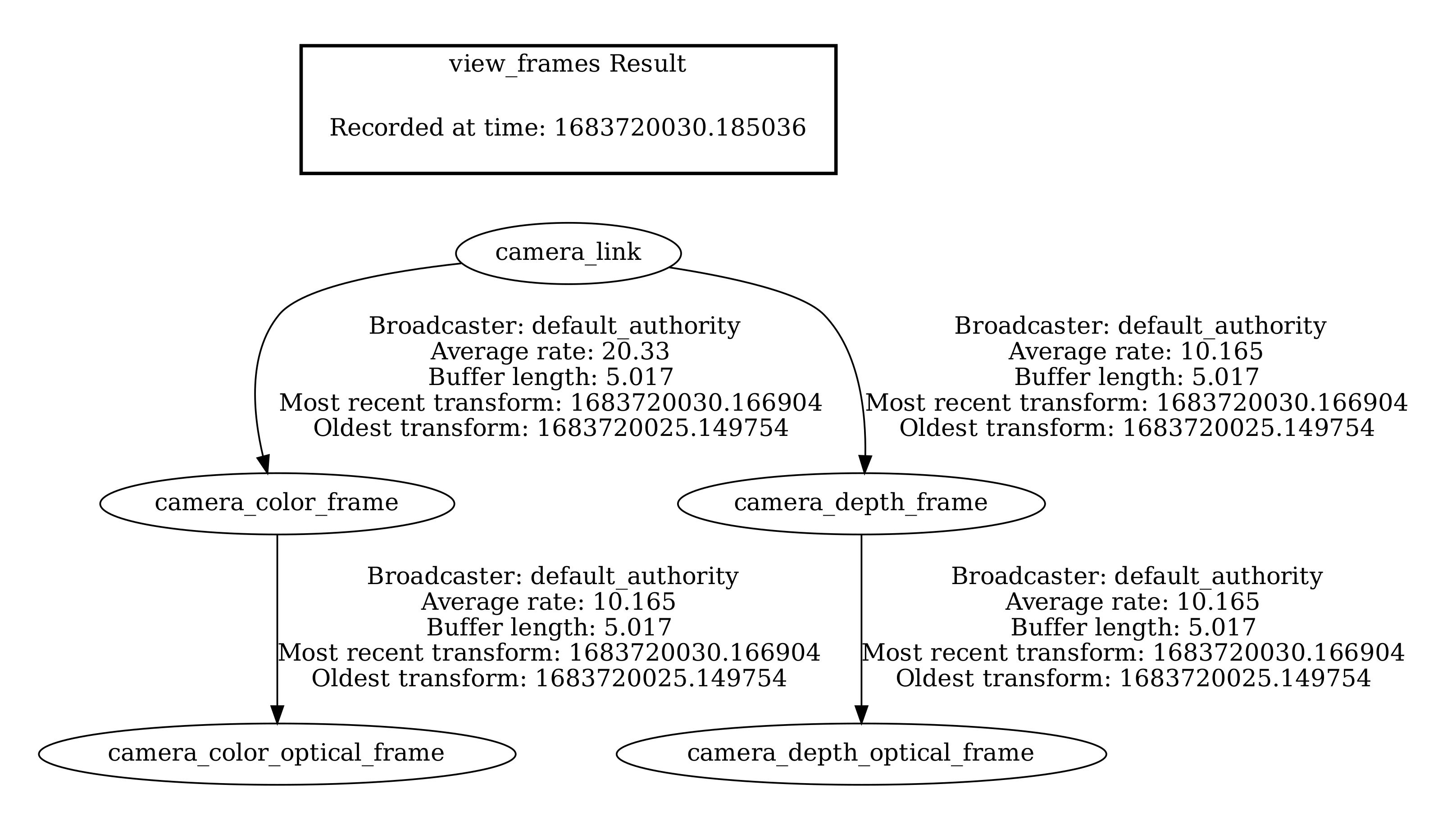
IMU에 대한 tf2와 topic이 없는 점은 많이 아쉽습니다.
- 혹시나 parameter로 IMU on/off를 제어하는가 싶었지만 param list 결과 없었습니다.
$ ros2 param list
/camera:
camera_link_frame_id
color_camera_info_qos
color_format
color_fps
color_frame_id
color_height
color_info_url
color_optical_frame_id
color_qos
color_width
depth_camera_info_qos
depth_format
depth_fps
depth_frame_id
depth_height
depth_optical_frame_id
depth_qos
depth_registration
depth_width
device_num
enable_color
enable_colored_point_cloud
enable_depth
enable_ir
enable_point_cloud
enable_publish_extrinsic
ir_camera_info_qos
ir_format
ir_fps
ir_frame_id
ir_height
ir_info_url
ir_optical_frame_id
ir_qos
ir_width
log_level
point_cloud_qos
publish_tf
serial_number
tf_publish_rate
use_sim_time
코드 분석
코드 분석에 앞서, launch file을 먼저 언급하자면, 일전 astra plus package와 두드러진 차이를 보이고 있습니다. 이러한 xml 문법은 ROS 1 시절 사용되었던 문법으로 사실 자주 사용되지는 않습니다.
<launch>
<!-- unique camera name-->
<arg name="camera_name" default="camera"/>
...
<group>
<node name="camera" pkg="orbbec_camera" exec="orbbec_camera_node" output="screen">
<param name="camera_name" value="$(var camera_name)"/>
...
<remap from="/$(var camera_name)/depth/color/points" to="/$(var camera_name)/depth_registered/points"/>
</node>
</group>
</launch>
더불어 한눈에 보아도 parameter들이 지저분하게 나열되어 있는 모습이 확인됩니다. 저라면 yaml file로 분리했을 것 같습니다!
대부분의 코드들은 이미 분석하였기 때문에 이번에는 새롭게 추가되거나 변경된 내용을 위주로 분석해보겠습니다.
- 각 File별 기능은 다음과 같습니다.
| Code | Description |
|---|---|
| list_devices_node.cpp | 실행중인 모든 디바이스들을 조회합니다. multi camera를 위한 디버깅 툴로 유추됩니다. |
| main.cpp | 일반적인 Node / Spin 구조의 main문으로 사실 ob_camera_node_factory를 통해 Composition으로 구현해두었기 때문에 불필요하다고 생각합니다. |
| ob_cleanup_shm.cpp | Astra에서 Node / SDK 사이 프로세싱을 thread로 처리한 것과 달리 Gemini에서는 세마포어를 사용합니다. 이에 따른 유틸리티 코드입니다. |
| ob_camera_node.cpp | 실질적인 topic publish, service server들이 구현되어 있던 코드입니다. 기능은 동일하지만 구조에서 차이가 발생하였습니다. |
| ob_camera_node_factory.cpp | 세마포어를 사용함에 따른 구현상의 작은 변화가 발생하였습니다. |
- OBCameraNodeFactory에서의 thread vs semaphore - 이전 버전
void OBCameraNodeFactory::init() {
ctx_->setLoggerSeverity(OB_LOG_SEVERITY_NONE);
is_alive_.store(true);
parameters_ = std::make_shared<Parameters>(this);
serial_number_ = declare_parameter<std::string>("serial_number", "");
wait_for_device_timeout_ = declare_parameter<double>("wait_for_device_timeout", 2.0);
reconnect_timeout_ = declare_parameter<double>("reconnect_timeout", 2.0);
query_thread_ = std::thread([=]() {
std::chrono::milliseconds timespan(static_cast<int>(reconnect_timeout_ * 1e3));
rclcpp::Time first_try_time = this->now();
while (is_alive_ && !device_) {
...
std::this_thread::sleep_for(actual_timespan);
}
}
});
}
- OBCameraNodeFactory에서의 thread vs semaphore - 신규 버전
std::shared_ptr<ob::Device> OBCameraNodeDriver::selectDevice(
const std::shared_ptr<ob::DeviceList> &list) {
if (device_num_ == 1) {
RCLCPP_INFO_STREAM(logger_, "Connecting to the default device");
return list->getDevice(0);
}
sem_t *device_sem = sem_open(DEFAULT_SEM_NAME.c_str(), O_CREAT, 0644, 1);
if (device_sem == SEM_FAILED) {
RCLCPP_INFO_STREAM(logger_, "Failed to open semaphore");
return nullptr;
}
...
list_devices_node.cpp의 빌드 결과물인 list_devices_node의 실행 결과입니다.
ros2 run orbbec_camera list_devices_node
...
[I20230510 19:48:22.675072 28664 DeviceManager.cpp:375] Orbbec Gemini 2 Depth Camera
[I20230510 19:48:22.675125 28664 DeviceManager.cpp:375] Orbbec Gemini 2 IR Camera
[I20230510 19:48:22.675169 28664 DeviceManager.cpp:375] Orbbec Gemini 2 RGB Camera
[I20230510 19:48:22.675212 28664 DeviceManager.cpp:375] Orbbec Gemini Data Channel
[I20230510 19:48:22.675287 28664 DeviceManager.cpp:375] Orbbec Gemini 2 IMU
ob_camera_node.cpp의 구조를 분석해보겠습니다. 대부분의 구조는 동일하며 이름의 변경과 구현상의 차이만 있을 뿐 Astra plus와 일맥상통합니다.
-
OBCameraNode
- setupDefaultImageFormat
- setupTopics
- getParameters (몇가지 parameter가 추가되었습니다.)
- setupDevices
- setupProfiles
setupDefaultStreamCalibData- setupCameraCtrlServices
- setupPublishers
- publishStaticTransforms
startPipeline⇒ startStreams- setupPipelineConfig
frameSetCallback⇒ onNewFrameSetCallback- onNewFrameCallback(color_frame)
- onNewFrameCallback(depth_frame)
- onNewFrameCallback(ir_frame)
- publishPointCloud
-
onNewFrameSetCallback에서 구현상 변경이 발생하였으며, Orbbec SDK와 ROS 2 Topic을 연동하는 onNewFrameCallback 매핑이 이루어졌습니다.
auto color_frame = std::dynamic_pointer_cast<ob::Frame>(frame_set->colorFrame());
auto depth_frame = std::dynamic_pointer_cast<ob::Frame>(frame_set->depthFrame());
auto ir_frame = std::dynamic_pointer_cast<ob::Frame>(frame_set->irFrame());
onNewFrameCallback(color_frame, COLOR);
onNewFrameCallback(depth_frame, DEPTH);
onNewFrameCallback(ir_frame, INFRA0);
publishPointCloud(frame_set);