Lecture18. Point Cloud Deep Learning Example (PointNet)
Special Part - Point Cloud Deep Learning Example (PointNet)

이번 시간에는 ROS 2와 딥러닝 모델을 결합하여 Application을 구현해보는 예시를 준비했습니다. 사실 제가 딥러닝 분야에 지식은 매우 얕은지라 모델에 대한 설명은 불가합니다. PyTorch를 통해 구현된 오픈소스에 기반하여 동작하는 ROS 2 코드를 개발하는 맥락에 집중해주시면 감사하겠습니다!
이번 예시는 cuda, cudnn 등 GPU를 활용하는 부분이 많습니다. 사용하시는 노트북이 GPU 드라이버를 지원한다면 괜찮지만 그렇지 않은 경우 학습 시 매우 많은 시간이 요구됩니다.
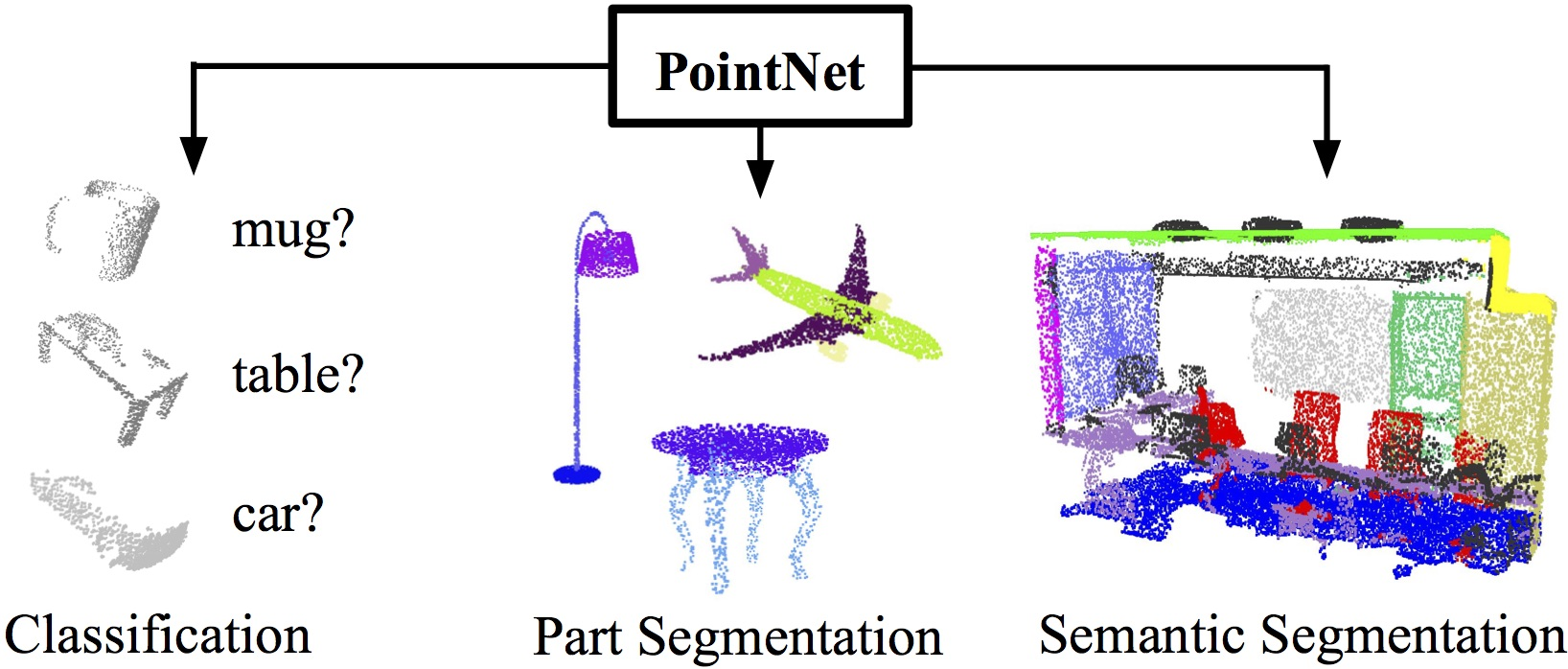
- 이번 시간 사용할 모델은 스탠포드의 PointNet으로, 3D PointCloud의 feature를 추출하는 가장 대표적인 네트워크입니다.
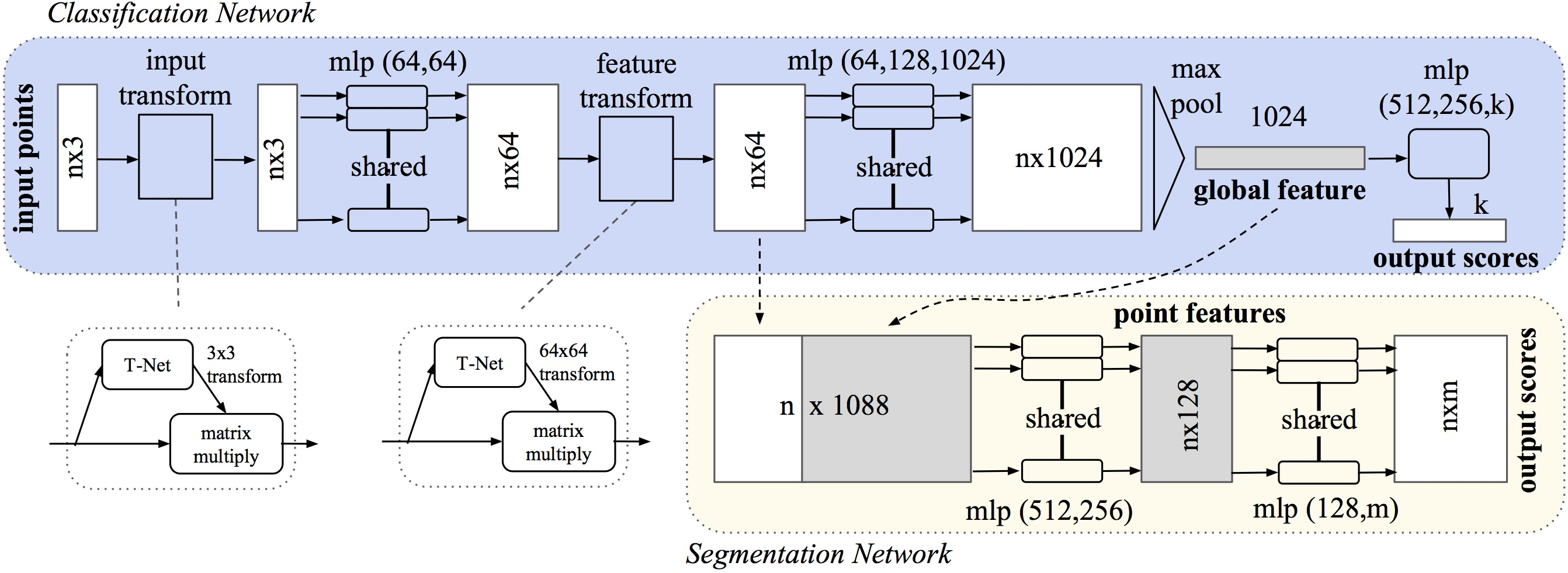
reference : PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
- pointnet 오픈소스에서 제공하는 기능은 classification과 segmentation으로 이번 예시에서는 classification에 집중해 보겠습니다.
Model Training
참고로, Anaconda와 같이 파이썬 가상환경을 사용하고 있다면 ROS 2 python 시스템과 호환이 불가할 수 있습니다. 파이썬 가상환경에 ROS 2 관련 패키지를 설치하시거나, ROS 2 python 환경에 torch 등 필요 패키지를 설치하시기 바랍니다.
- Model 코드를 clone하고 학습을 위해 필요한 dataset을 다운로드합니다. shapenet dataset의 일부가 다운로드됩니다.
git clone https://github.com/fxia22/pointnet.pytorch
cd pointnet.pytorch
pip install -e .
cd scripts
# build C++ code for visualization
bash build.sh
# download dataset
bash download.sh
현재 데모에서 사용하는 dataset은 약 1.1GB로 매우 적은 종류의 물체를 담고 있습니다. 단지 빠른 데모를 위해 이렇게 적용하는 점에 유의하세요!
- PointNet을 학습 시켜봅시다. segmentation과 classification 중 원하는 상황에 맞추어 training을 진행합니다. dataset이 약 1GB이기 때문에 epoch을 25로 하여도 시간은 오래 걸리지 않습니다.
cd utils
python train_classification.py --dataset <dataset path> --nepoch=<number epochs> --dataset_type <modelnet40 | shapenet>
python train_segmentation.py --dataset <dataset path> --nepoch=<number epochs>
# example
python3 train_segmentation.py --dataset /home/kimsooyoung/Downloads/pointnet.pytorch/shapenetcore_partanno_segmentation_benchmark_v0 --nepoch=24
python3 train_classification.py --dataset /home/kimsooyoung/Downloads/pointnet.pytorch/shapenetcore_partanno_segmentation_benchmark_v0 --nepoch=24 --dataset_type shapenet
- Training 결과로 cls, seg 폴더 내 pth 파일이 생성됩니다.
Confirm Trained Parameters
ROS 2 연동 전 학습된 pth 모델을 검증해봅시다. 별도의 clone은 필요 없으며 오픈 소스의 수정으로 제가 미리 준비한 코드를 사용하겠습니다.
해당 코드는 isl-org의 오픈소스에 기반하였습니다. ⇒ https://github.com/isl-org/Open3D-PointNet
- 검증 프로그램을 실행하기 위한 추가 패키지를 다운로드 받습니다.
pip install torchvision
pip install open3d
pip install --upgrade numpy
- 제공된 검증 코드 pointnet_test.py 내부 모델 경로와 dataset 경로를 수정한 뒤, 예시 프로그램을 실행합니다.
cd Open3D-PointNet
pip install -r requirements.txt
# 코드 중 아래 내용 수정
NUM_POINTS = 10000
MODEL_PATH = '/home/kimsooyoung/Downloads/pointnet.pytorch/utils/cls/cls_model_23.pth'
DATA_FOLDER = '/home/kimsooyoung/Downloads/pointnet.pytorch/shapenetcore_partanno_segmentation_benchmark_v0'
# 데모 실행
python3 pointnet_test.py
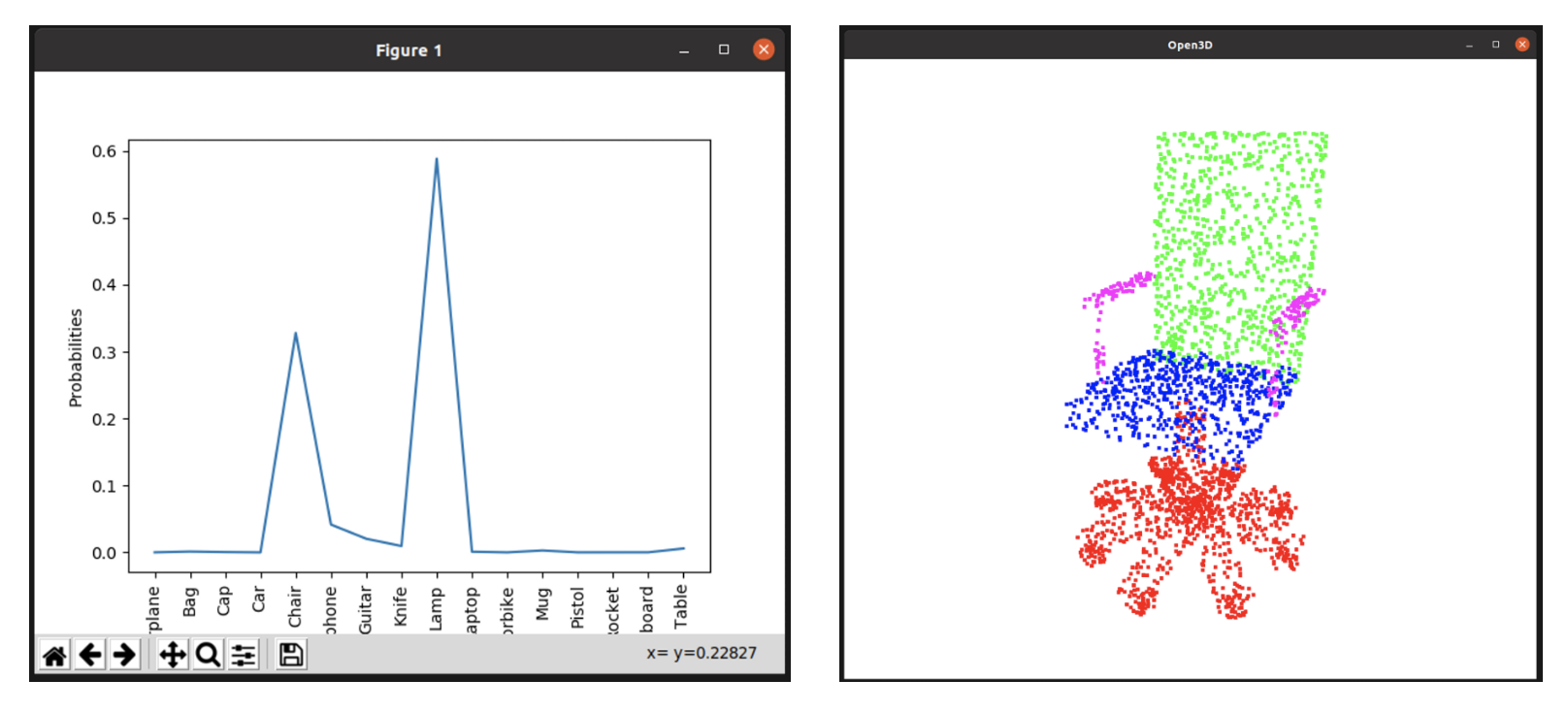
prediction 결과 vector와 pointcloud 데이터를 시각화해서 보여줍니다.
- 현재 dataset으로 구분할 수 있는 항목들은 다음과 같습니다. 계속해서 이야기하지만 dataset 자체의 한계로 검출할 수 있는 객체가 많지는 않습니다. 😅
# Problem ontology
classes_dict = {'Airplane': 0, 'Bag': 1, 'Cap': 2, 'Car': 3, 'Chair': 4,
'Earphone': 5, 'Guitar': 6, 'Knife': 7, 'Lamp': 8, 'Laptop': 9,
'Motorbike': 10, 'Mug': 11, 'Pistol': 12, 'Rocket': 13,
'Skateboard': 14, 'Table': 15}
PointNet ROS 2 연동
드디어 ROS 2와 PointNet을 연동시켜보려 합니다. 개발의 시작 전, 항상 어떠한 기능을 구현해야 하는지, 이미 개발 가능한 것을 무엇이고 새롭게 구현해야 하는 것은 무엇인지 습관적으로 구체화시키시길 바랍니다.
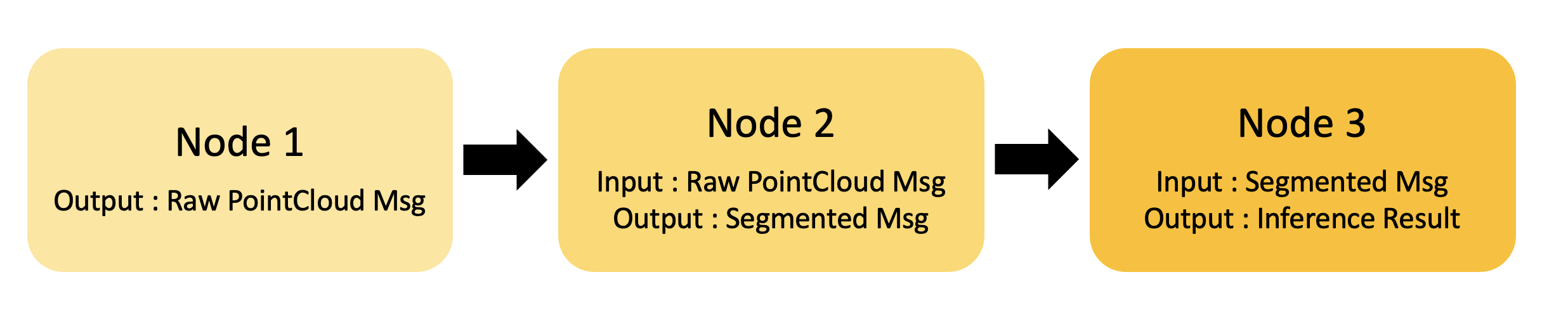
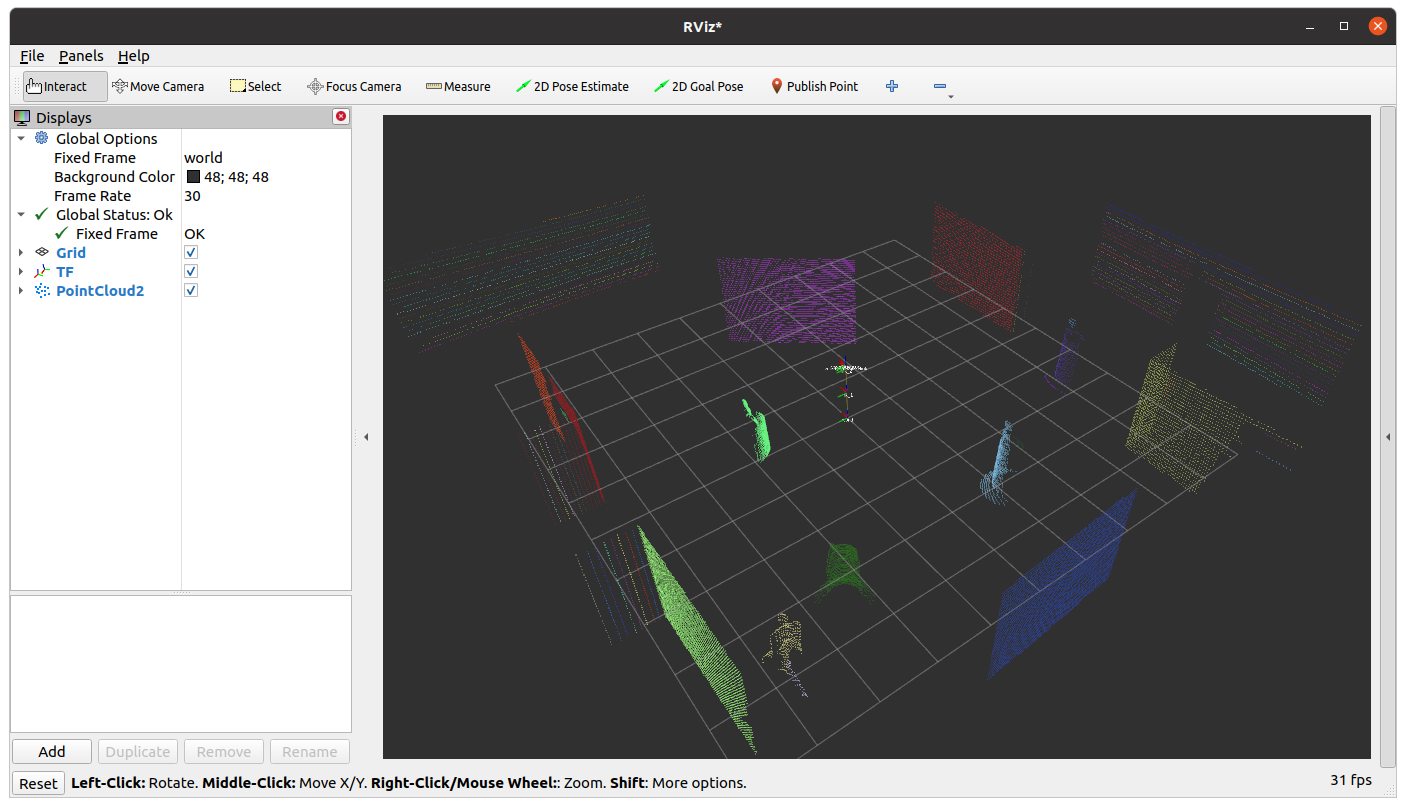
- shapenet dataset이 아닌, Gazebo로부터의 Raw PointCloud를 subscribe하여 물체 인식을 하고자 합니다. 이를 위한 Gazebo 환경은 일전의 rgbd world를 사용하겠습니다.
- 센서로부터의 raw Point Cloud에서 바닥을 제거하고 물체별로 clustering을 하는 작업 또한 일전 구현한 바 있습니다.
- 따라서 우리는 약간의 수정과 마지막 Node, Clustering된 pointcloud를 받아 어떤 물체인지 판단하는 기능만 구현하면 됩니다.

- 앞선 내용들을 잘 생각하면서, 예시부터 실행해봅시다.
예시 실행 전, pointnet_torch/pointnet_node.py 코드 내 pth 파일 위치를 갱신해주세요!
class PointNetNode(Node):
def __init__(self):
super().__init__('pointnet_cls_node')
self.declare_parameter('model_path', '/home/kimsooyoung/Downloads/pointnet/pointnet.pytorch/utils/cls/cls_model_23.pth')
self.declare_parameter('num_points', 10000)
# Terminal 1 - gazebo launch
ros2 launch rgbd_world pointnet_world.launch.py
# Terminal 2 - object spawn
ros2 run py_service_tutorial pointnet_object_wo_gravity
# Terminal 3 - clustering
ros2 run py_pcl_tutorial pointnet_cluster_pub
# Terminal 4 - torch classification
ros2 run pointnet_torch pointnet_torch
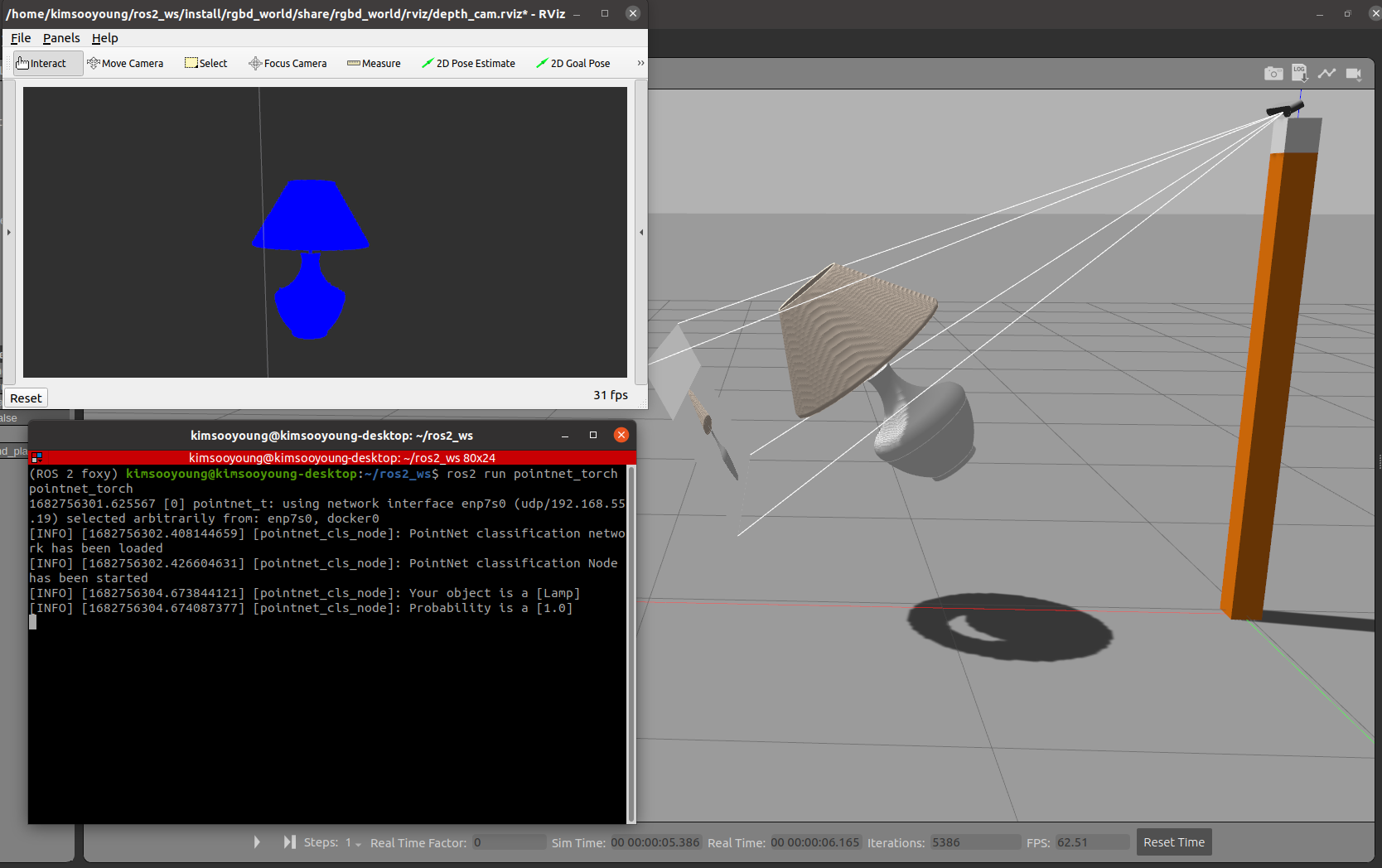
마지막 터미널에서 검출된 물체와 정확도를 확인할 수 있습니다.
- 예제 실행 시 gpu 메모리 제한에 따른 오류가 발생할 수 있습니다. 아래 명령어를 통해 gpu 점유율을 확인하며 실행을 추천드립니다.
nvidia-smi -l 1
코드 분석
- 학습된 dataset과 3DGEMS를 통해 확보한 gazebo model 중 겹치는 것들을 먼저 확인해보았습니다.
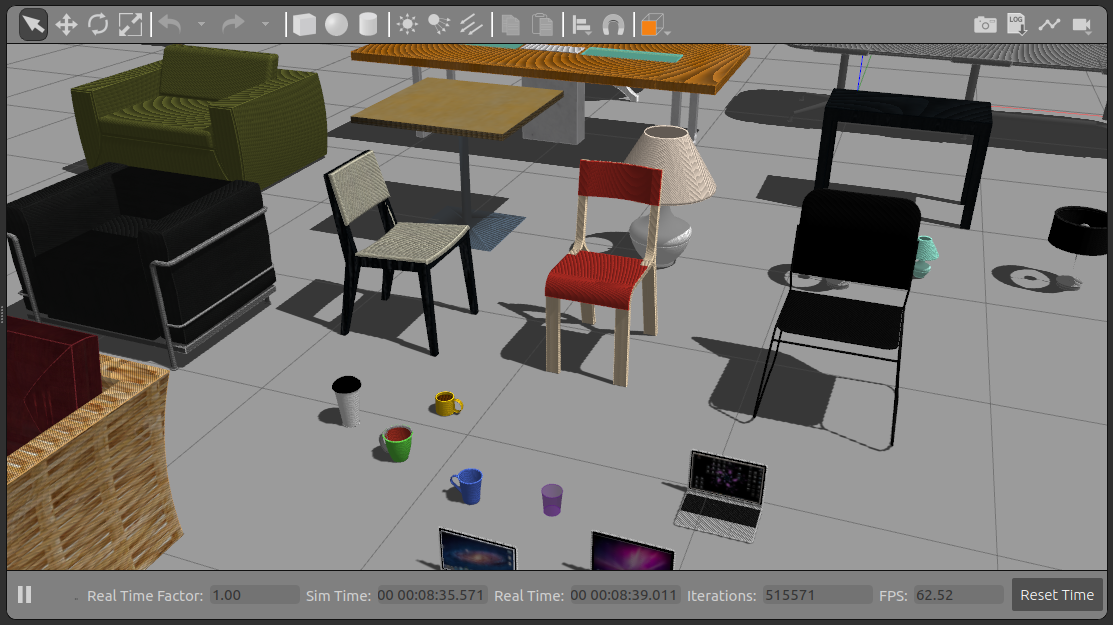
- 확인된 모델들이 등장하도록 Model spawn service client의 코드를 수정합니다
def send_spawn_req(self):
# model_name = "beer"
model_id = input("""Enter Model name Among Below List
1.chair_1 \t2.chair_2 \t3.chair_3
4.labtop_mac_1 \t5.labtop_mac_2 \t6.labtop_mac_3
7.cup_green \t8.cup_blue \t9.cup_yellow
10.cup_paper \t11.lamp_table_large \t12.lamp_table_small
13.side_table_1 \t14.side_table_3 \t15.side_table_set_1
16.side_table_set_2 \t17.table_dining \t18.cafe_table
[Type your choice]: """)
- 다음으로 Clustering 코드를 수정해보겠습니다. Topic 이름 변경과 더불어 전처리 과정 중 Voxel grid와 RANSAC만 적용하도록 수정했습니다.
# RANSAC plane segmentation
# Create the segmentation object
seg = cloud_voxed.make_segmenter()
...
# Extract inliers
extracted_inliers = cloud_voxed.extract(inliers, negative=True)
# inliers into list for ROS 2 Conversion
color_cluster_point_list = []
# cloud size color generator
color = size_color_gen(extracted_inliers)
for i, indices in enumerate(extracted_inliers):
color_cluster_point_list.append([extracted_inliers[i][0],
extracted_inliers[i][1],
extracted_inliers[i][2],
rgb_to_float(color)])
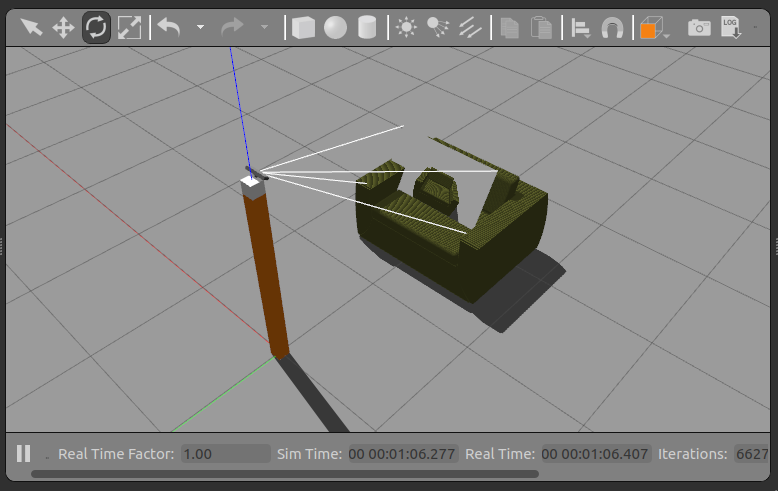
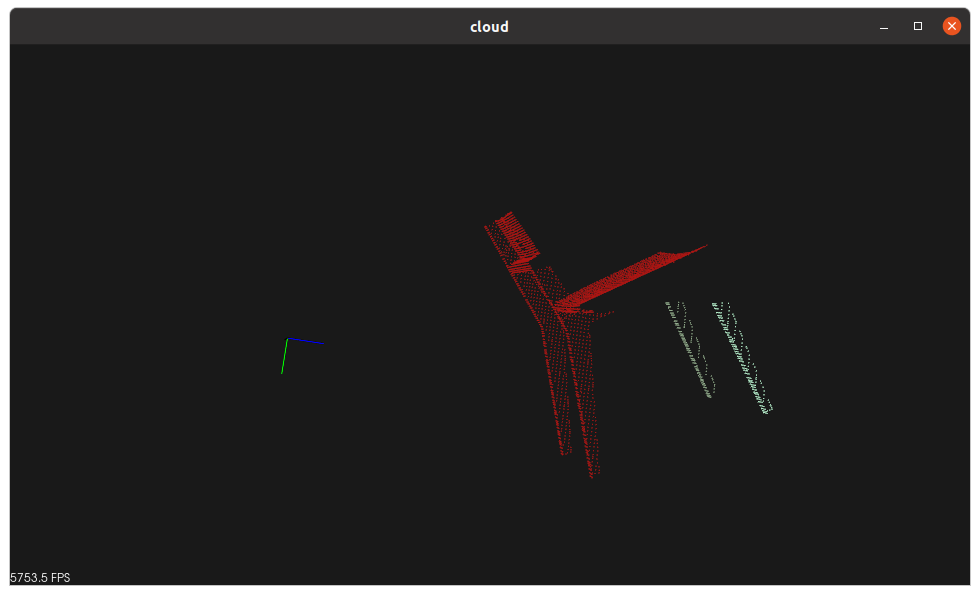
카메라가 한쪽 방향만을 인지하여 아래와 같이 객체가 분리되는 상황이 발생하기 때문에 알고리즘을 간소화하였습니다.
마지막으로 PointCloud2 topic을 통해 Inference를 실행하는 코드입니다.
- 생성자에서 Tuning된 parameter를 upload하여 classifier를 생성합니다.
class PointNetNode(Node):
def __init__(self):
super().__init__('pointnet_cls_node')
self.declare_parameter('model_path', '/home/kimsooyoung/Downloads/pointnet/pointnet.pytorch/utils/cls/cls_model_23.pth')
self.declare_parameter('num_points', 10000)
MODEL_PATH = self.get_parameter('model_path').value
NUM_POINTS = self.get_parameter('num_points').value
# Create the classification network from pre-trained model
self.classifier = PointNetCls(k=len(classes_dict.items()), num_points=NUM_POINTS)
if torch.cuda.is_available():
self.classifier.cuda()
self.classifier.load_state_dict(torch.load(MODEL_PATH))
else:
self.classifier.load_state_dict(torch.load(MODEL_PATH, map_location='cpu'))
self.classifier.eval()
- callback에서는 PointCloud2 형식의 데이터를 subscribe 한 뒤 numpy.asarray로 변형하여 pytorch에게 넘길 준비를 합니다.
def obj_callback(self, msg):
# 1. Convert PointCloud2 message to numpy array
points_list = []
for data in pc2.read_points(msg, skip_nans=True):
points_list.append([data[0], data[1], data[2]])
points = np.asarray(points_list, dtype=np.float32)
# 2. numpy resample
m, n = points.shape
choice = np.random.choice(m, 10000, replace=True)
point_set = points[choice, :]
# 3. numpy to torch
point_set = torch.from_numpy(point_set)
- classifier를 통한 Interence후 검출 결과는 다시 cpu로 넘어온 뒤 콘솔 출력됩니다.
# 4. perform inference in GPU
if self.cb_flag == True:
points = Variable(point_set.unsqueeze(0))
points = points.transpose(2, 1)
if torch.cuda.is_available():
points = points.cuda()
pred_logsoft, _ = self.classifier(points)
# move data back to cpu
pred_logsoft_cpu = pred_logsoft.data.cpu().numpy().squeeze()
pred_soft_cpu = np.exp(pred_logsoft_cpu)
pred_class = np.argmax(pred_soft_cpu)
self.get_logger().info(f'Your object is a [{list(classes_dict.keys())[pred_class]}]')
self.get_logger().info('Probability is a [{:0.3}]'.format(pred_soft_cpu[pred_class]))
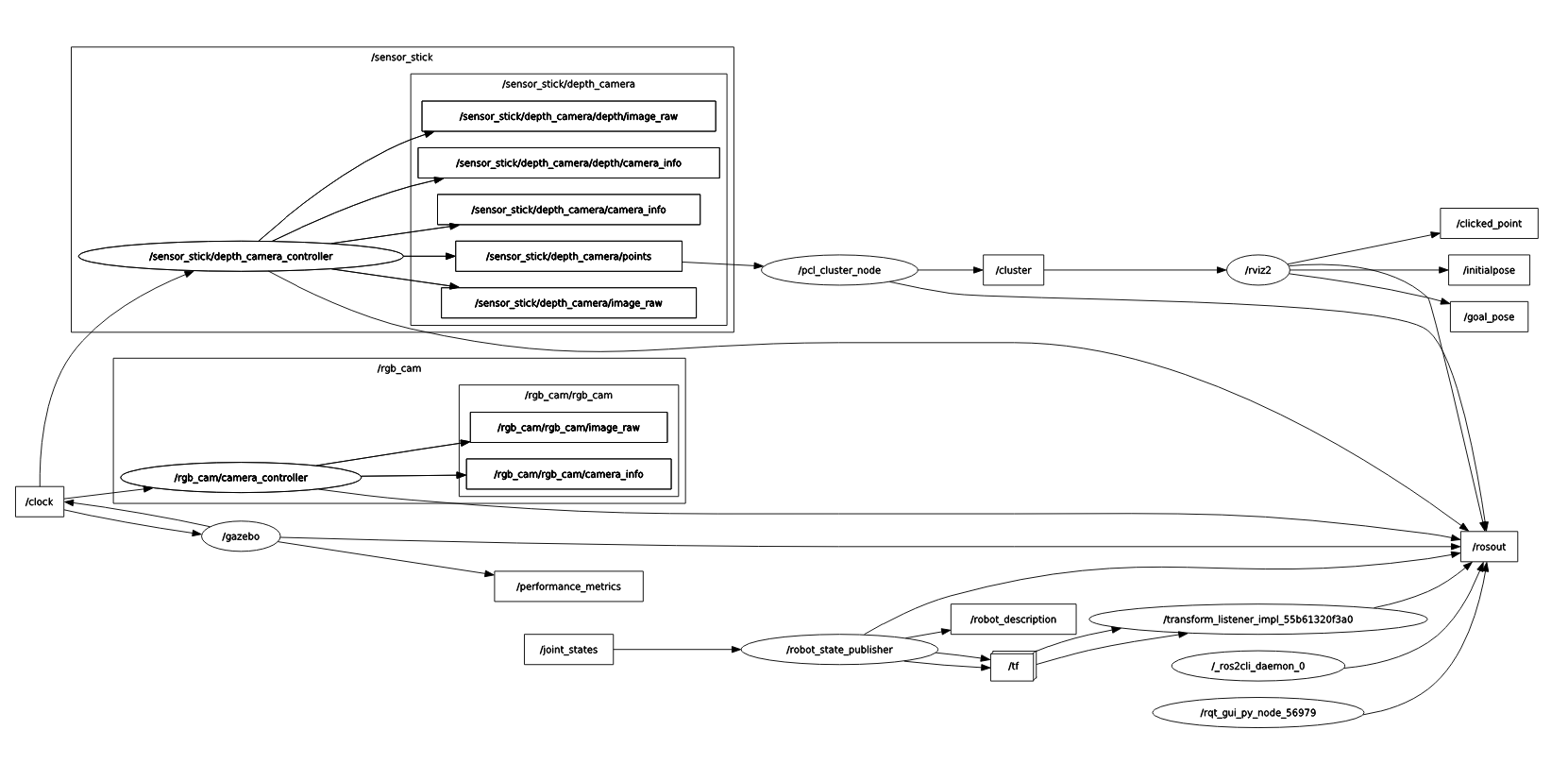
- 전체 시스템을 rqt graph로 살펴보면 다음과 같습니다. 앞서 개요로 설명했던 Node들에 유의하며 차근차근 분석해보세요!!