Lecture3. Core of ROS
Husky Gazebo
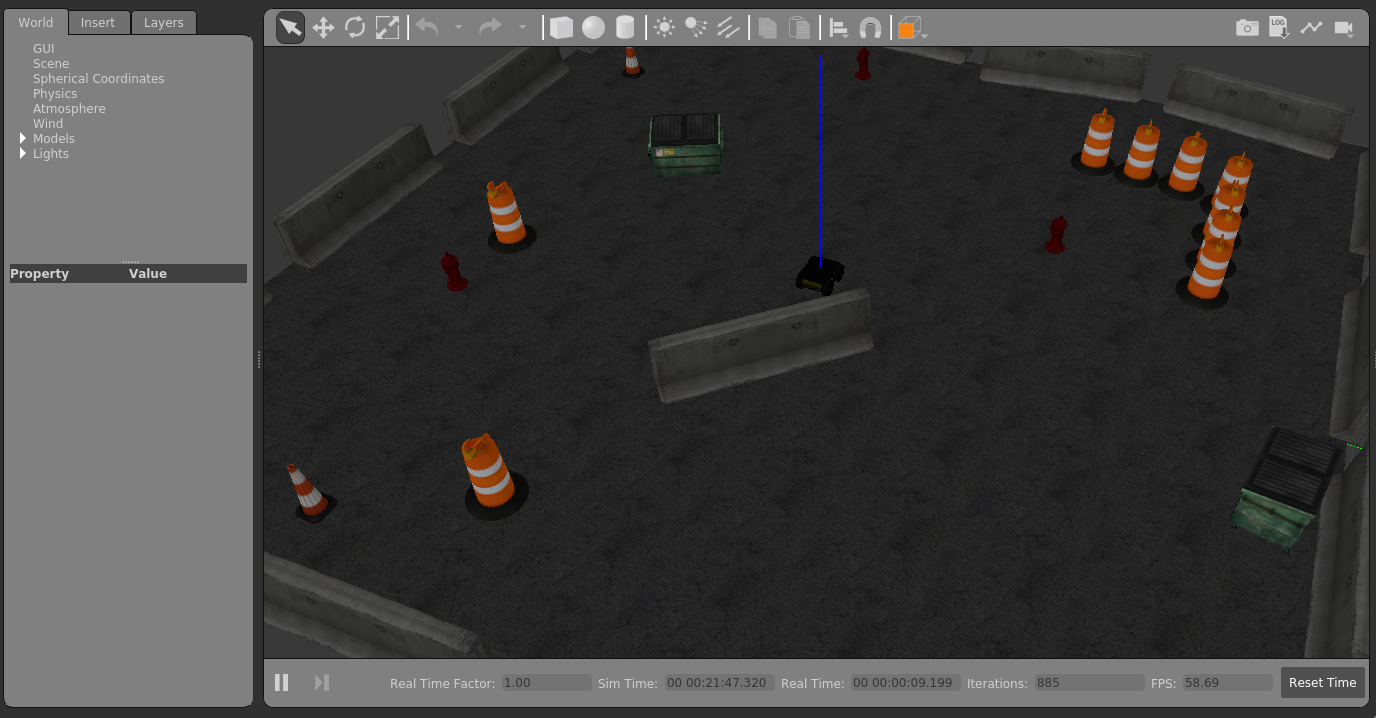
강의에 앞서, Gazebo상에 ClearPath의 Husky라는 로봇을 등장시켜보고자 합니다.

image from : clearpath robotics
- 예제 패키지 설치
sudo apt-get update
sudo apt install ros-foxy-husky-gazebo
sudo apt install ros-foxy-husky-simulator
sudo apt install ros-foxy-husky-viz
- 시뮬레이션 실행
# Terminal 1
ros2 launch husky_gazebo husky_playpen.launch.py
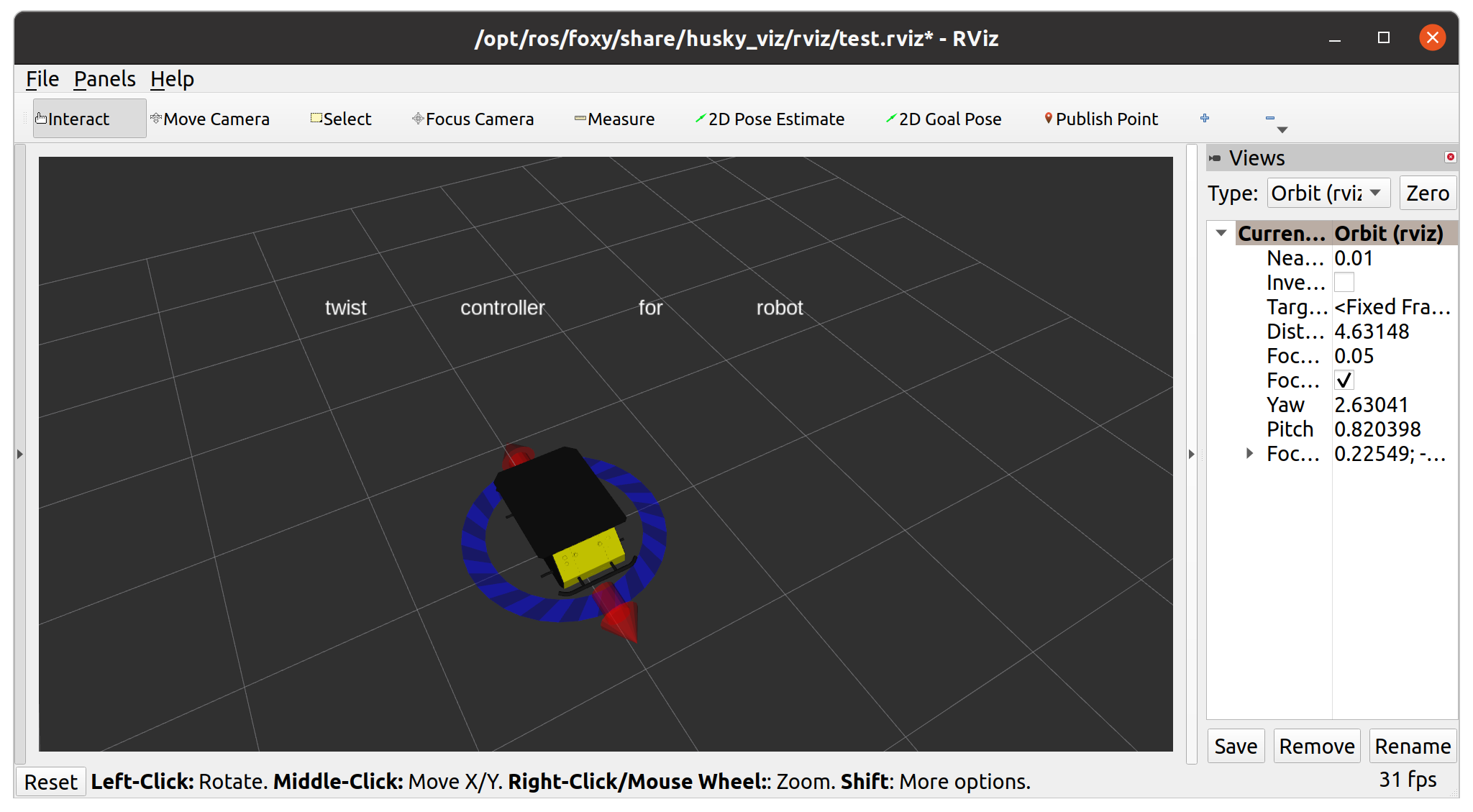
- Rviz2 + Controller 실행 (Rviz2상의 interactive marker를 사용하여 로봇을 이동시킬 수 있습니다.)
# Terminal 2
ros2 launch husky_viz view_robot.launch.py
- 다음으로, 새로운 터미널에서 아래 커멘드 라인을 실행시켜 봅시다.
rqt_graph
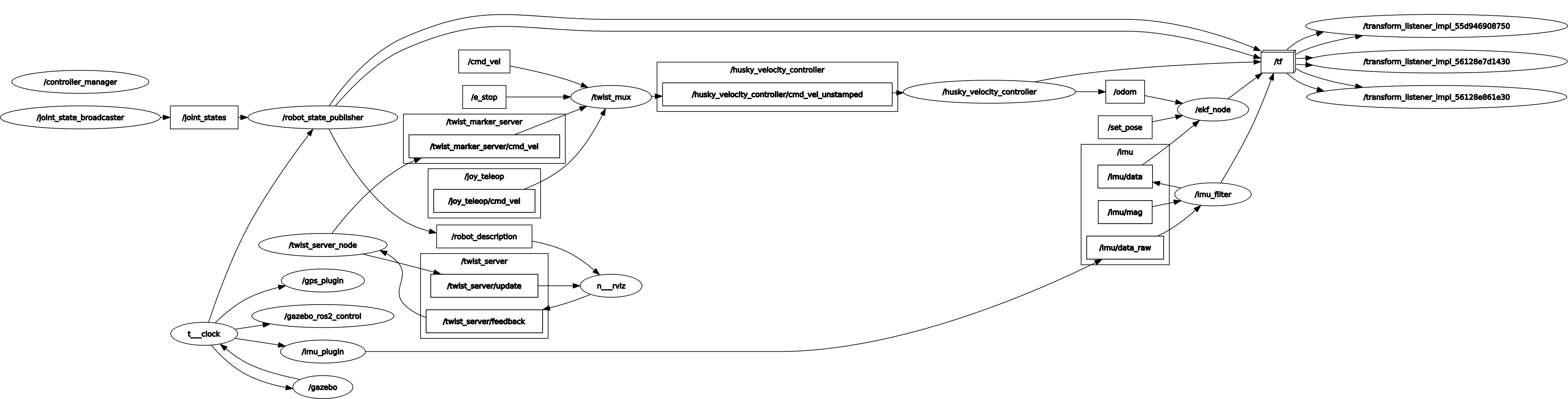
위 그림은 방금 전 실행한 예제 내부적으로 어떠한 동작들이 이루어지고 있었는지를 보여주는 것으로, 강의를 마칠 때면 여러분들은 위 그림이 어떠한 의미를 갖는지 모두 이해하실 수 있을 것입니다.
다음으로, 터미널을 새로 실행시켜 아래의 명령어들을 실행시켜 봅시다.
- ros2 node list
$ ros2 node list
/controller_manager
/ekf_node
/gazebo
/gazebo_ros2_control
/gps_plugin
/husky_velocity_controller
/imu_filter
/imu_plugin
...
- ros2 topic list
$ ros2 topic list
/clicked_point
/clock
/cmd_vel
/diagnostics
/dynamic_joint_states
/e_stop
/goal_pose
/gps/data
/husky_velocity_controller/cmd_vel_unstamped
/imu/data
/imu/data_raw
/imu/mag
/initialpose
...
위 명령어들이 어떠한 의미를 갖는지 하나하나씩 함께 살펴보겠습니다.
ROS 2 Node
ROS 2는 각 프로세스들을 Node라는 단위로 관리합니다.
- 로봇을 움직이는 Node, 센서와 통신하는 Node, 시각화 Node 등 다양한 Node들이 얽혀 로봇 시스템을 구성하게 됩니다.
- Node들 사이에는 데이터의 송수신이 필요합니다. 이를 담당하는 ROS의 통신 메커니즘들이 있으며 각기 다른 특성을 갖고 있습니다. (topic, service, action)
- 실행중인 Node를 확인하는 방법으로 저는 크게 두가지를 사용합니다.
- ROS 2 command line interface
$ ros2 node list
/node1
/node2
/node3
...
- rqt_graph
rqt_graph
# or
ros2 run rqt_graph rqt_graph
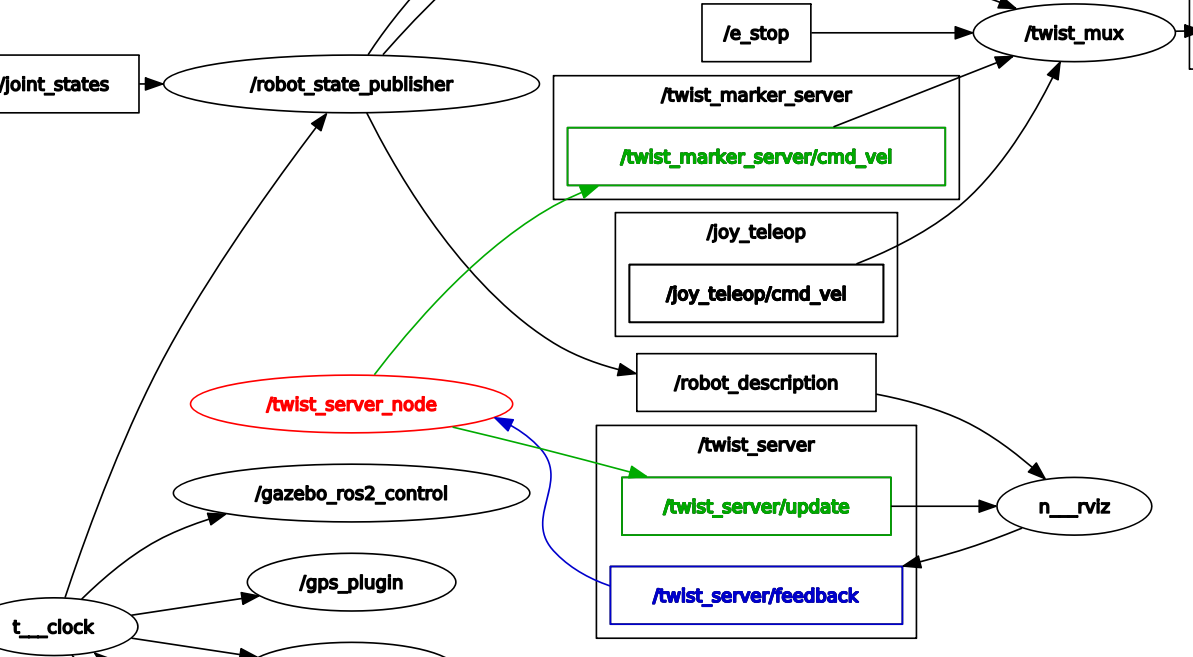
- rqt graph를 살펴보면, 동그란 Node와 Node들 사이의 데이터 송수신이 화살표로 표현된 것을 알 수 있습니다.
- Rviz2 marker를 통해 제어 데이터가 송신되어 twist_mux로 전달되고 있으며, 따라서 gazebo는 이 데이터를 통해 실제 로봇을 움직이게 되는 것입니다.
- 특정 Node에 대해서 더 자세한 정보를 얻고 싶다면, info 커맨드를 사용합니다.
$ ros2 node info /ekf_node
/ekf_node
Subscribers:
/imu/data: sensor_msgs/msg/Imu
/odom: nav_msgs/msg/Odometry
/parameter_events: rcl_interfaces/msg/ParameterEvent
/set_pose: geometry_msgs/msg/PoseWithCovarianceStamped
Publishers:
/diagnostics: diagnostic_msgs/msg/DiagnosticArray
/odometry/filtered: nav_msgs/msg/Odometry
/parameter_events: rcl_interfaces/msg/ParameterEvent
/rosout: rcl_interfaces/msg/Log
/tf: tf2_msgs/msg/TFMessage
Service Servers:
/ekf_node/describe_parameters: rcl_interfaces/srv/DescribeParameters
...
- 현재 예시를 실행하며 수많은 프로그램들이 동작되어 매우 복잡한 상황입니다. 이전 예제들은 일단 종료시킨 뒤, 보다 간단한 예시를 실행해봅시다.
# Terminal 1
ros2 run examples_rclcpp_minimal_publisher publisher_member_function
# Terminal 2
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
# Terminal 3
rqt_graph
rqt_graph를 보면 publisher ⇒ subscriber 로 데이터가 전송되는 것을 알 수 있습니다.
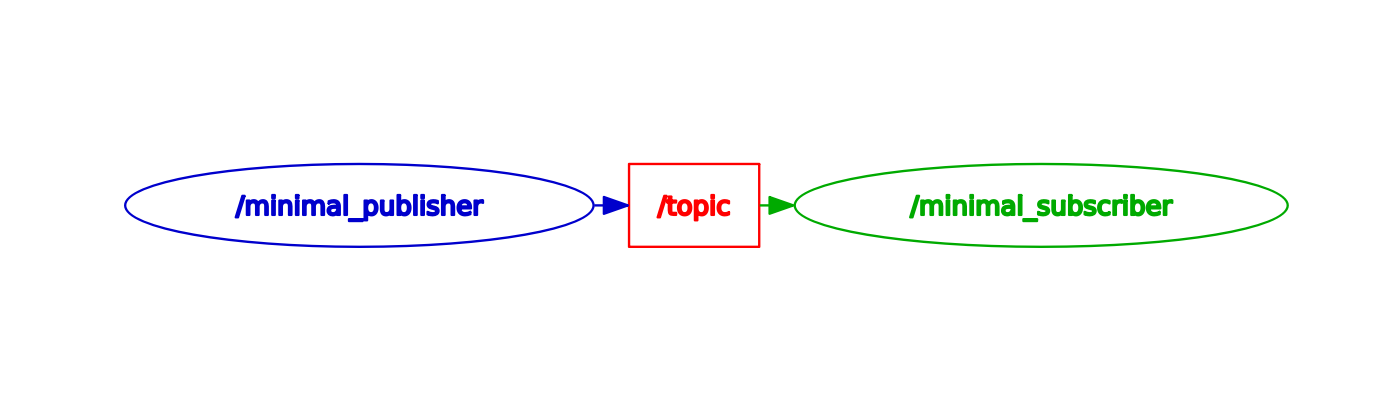
이것이 바로 ROS 2가 데이터를 송수신하는 가장 기본적인 구조입니다.
- 서로 다른 두 프로그램(Node)을 생성하고
- ROS 2에서 사용하는 특정한 형식에 이 둘 사이에 오가야 하는 데이터를 채워넣습니다.
- 두 프로그램 사이 통신은 DDS를 사용합니다.
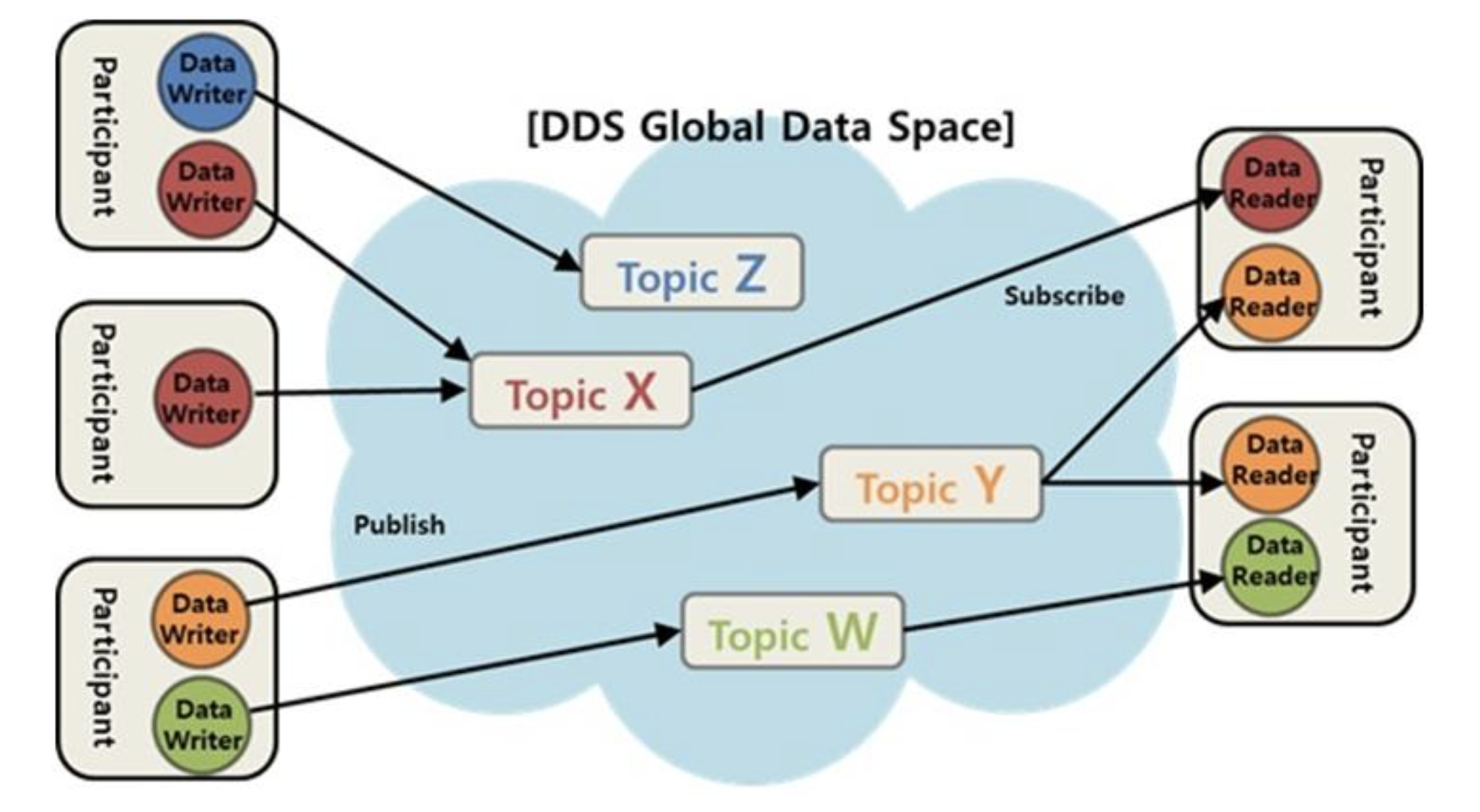
- image from : MDS 테크
ROS 2 Workspace 생성
- ROS 2의 Package는 관련된 파일들과 코드를 한데 모아둔 폴더이자, 빌드의 단위입니다.
- 그리고 이러한 패키지는 특정 Workspace안에 담겨있어야 합니다.
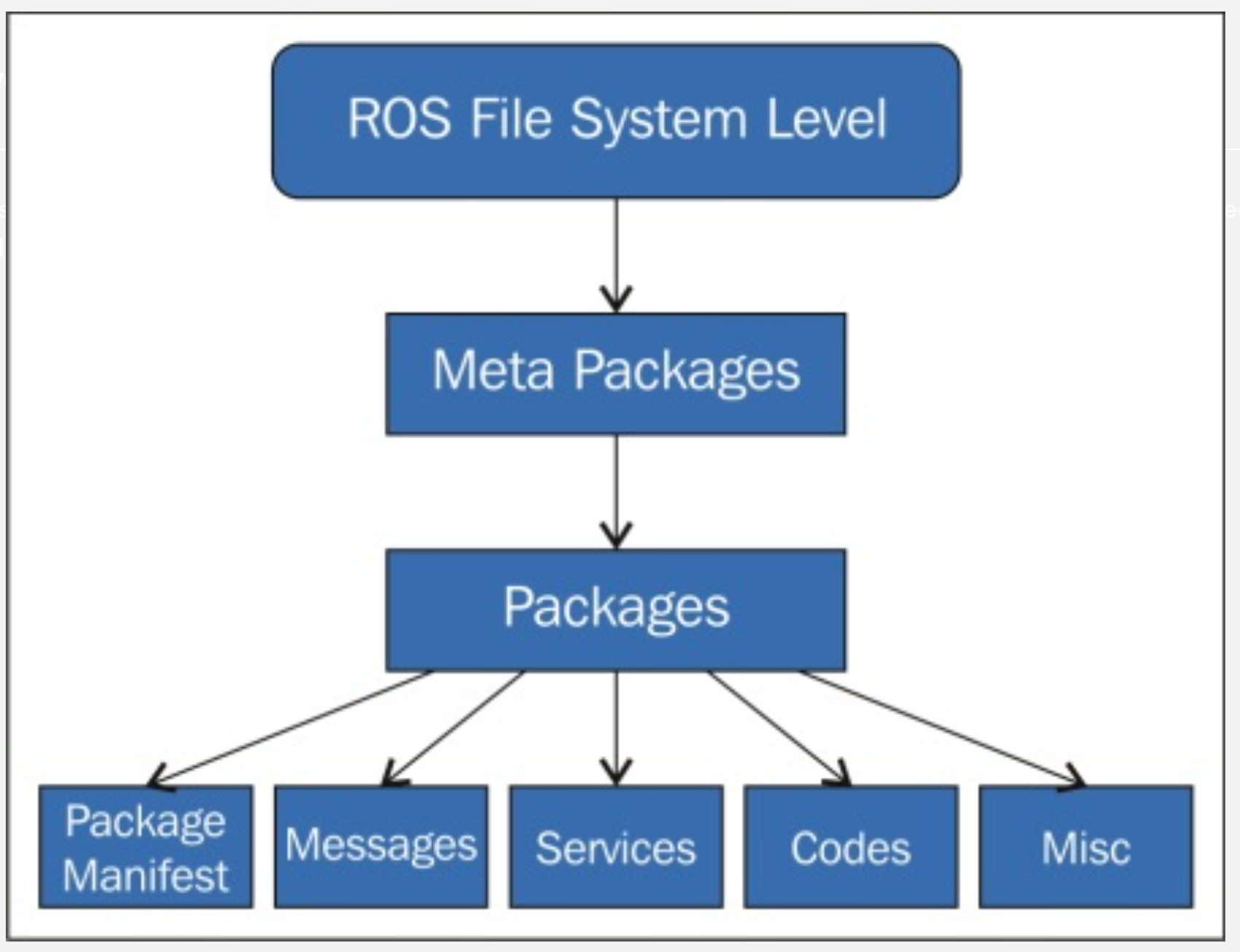
- image from : packthub
Workspace??
마치 파이썬의 가상 환경을 사용하는 것처럼, ROS 2 개발을 하다 보면 진행하는 프로젝트에 따라 하나의 PC에 여러 ROS 2 환경이 필요해지는 경우가 생깁니다.
- 강의용 WS
- 개발용 WS
- 배포용 Clean WS
- etc…
ROS 2에서 사용중인 colcon 시스템은 Workspace를 나눔으로 이 작업을 손쉽게 해줍니다.
이번 강의용 WS를 만들어보겠습니다. 이후 여러분들만의 WS도 만들어 작업해보세요!
- 일반적으로 ROS 2의 workspace는 _ws라는 이름을 갖는 것이 일반적이며, 우리는 ros2_ws라는 workspace를 만들어보고자 합니다.
cd ~/
# colcon workspace는 반드시 src라는 폴더가 있어야 합니다.
mkdir -p ros2_ws/src
cd ros2_ws
colcon build
- image from : colcon.readthedocs
ros2_ws
├── build
│ └── COLCON_IGNORE
├── install
│ ├── COLCON_IGNORE
│ ├── setup.bash
├── log
└── src
작업을 완료하면, 위와 같은 폴더 구조가 자동 생성되었을 것입니다.
- build : 컴파일 된 프로그램, custom interface 등이 위치하게 됩니다.
- install : ros2 launch와 ros2 run 등의 명령어는 프로그램의 실행 시 이 install 폴더 내 파일들을 조회합니다. 일종의 바로가기들의 모임이라고 생각하면 됩니다.
- log : colcon build 시 발생하는 로드들이 위치하게 됩니다.
- src : 모든 소스 코드들이 위치하게 됩니다.
package를 지우고 싶은 경우에는 src에서 코드 원본을 지운 뒤, build와 install 폴더에서 해당 package에 해당하는 내용들도 삭제해야 합니다!
Package 생성 실습
ROS 2에서는 colcon을 사용하여 새로운 package를 생성합니다. 하지만, ROS 2에서는 사용하는 프로그래밍 언어에 따라 다른 build type을 사용합니다. 자주 사용되는 두 언어(python/c++)에 대해서 패키지를 생성해보겠습니다.
ROS 2 Python Package
- 파이썬 패키지의 생성은 다음과 같습니다.
$ ros2 pkg create --build-type ament_python <package_name>
# example
$ ros2 pkg create --build-type ament_python my_first_pkg
going to create a new package
package name: my_first_pkg
destination directory: /home/kimsooyoung/ros2_ws/src
package format: 3
version: 0.0.0
...
- 다음과 같은 폴더 구조가 자동 생성됩니다.
my_first_pkg/
├── my_first_pkg
│ └── __init__.py
├── package.xml
├── resource
│ └── my_first_pkg
├── setup.cfg
├── setup.py
└── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
- 새롭게 생성된 패키지를 빌드해봅시다. (여기서의 빌드는 컴파일을 거치는 빌드가 아니라 colcon 시스템에서의 빌드를 뜻합니다.)
$ cd ~/ros2_ws
$ colcon build --packages-select my_first_pkg
Starting >>> my_first_pkg
Finished <<< my_first_pkg [1.56s]
Summary: 1 package finished [1.96s]
- 빌드 결과로, workspace 내부 build와 install 폴더 내부에 해당 패키지 이름을 갖는 폴더가 생성됩니다.
$ cd ~/ros2_ws/build
$ ls
**COLCON_IGNORE my_first_pkg/
$ cd ~/ros2_ws/install
$ ls
**COLCON_IGNORE my_first_pkg/ ...
ROS 2 Cpp Package
대부분의 오픈소스 패키지들은 C++로 개발되어 있는 경우가 많습니다. 따라서, 실제 작업 시 파이썬을 위주로 사용하더라도 적어도 C++ 패키지의 구조는 파악하고 있어야 오류 상황에 대처할 수 있습니다.
- C++ 패키지의 생성은 다음과 같습니다.
$ ros2 pkg create --build-type ament_cmake <package_name>
# example
$ ros2 pkg create --build-type ament_cmake my_first_cpp_pkg
going to create a new package
package name: my_first_cpp_pkg
destination directory: /home/kimsooyoung/ros2_ws/src
package format: 3
version: 0.0.0
...
- C++ 패키지는 다음과 같은 구조를 갖습니다. 파이썬과 달리, C++는 컴파일 언어이기 때문에 make를 위한 CMakeLists.txt 파일이 추가되어 있습니다.
my_first_cpp_pkg
├── CMakeLists.txt
├── include
│ └── my_first_cpp_pkg
├── package.xml
└── src
일반적으로 C++ 개발을 하다보면 header와 source의 분리를 시키곤 합니다. 비슷하게, ROS 2에서도 보통 include 폴더 안에 헤더 파일을 위치시키고, src 폴더 안에 소스 코드를 위치시킵니다.
- 빌드와 실행은 파이썬과 동일한 커멘드 라인을 사용합니다.
$ colcon build --packages-select my_first_cpp_pkg
Starting >>> my_first_cpp_pkg
Finished <<< my_first_cpp_pkg [1.56s]
Summary: 1 package finished [1.96s]
이 시점에서, colcon을 사용하여 package를 빌드하는 방법들을 정리하여 소개합니다.
- colcon build : src 폴더 내부에 존재하는 모든 package들을 빌드합니다.
- colcon build –packages-up-to : 해당 package의 종속성이 존재할 시, 이들을 먼저 빌드하고 pkg-name을 빌드합니다.
- colcon build –packages-select : 해당 package만을 빌드합니다.
새로운 Package를 빌드했다면, 변경 내용을 갱신 (source) 해주어야 합니다. 이 작업에는 크게 두가지가 존재합니다.
source install/setup.bash⇒ workspace를 source하고 ROS 2시스템 전체를 갱신합니다.source install/local_setup.bash⇒ workspace만을 sources합니다. (여러 ROS 2 workspace가 있는 경우 local_setup.bash를 사용합시다.)
참고로, setup.bash에는 결국 local_setup.bash가 포함되어 있습니다.
# source chained prefixes
# setting COLCON_CURRENT_PREFIX avoids determining the prefix in the sourced script
COLCON_CURRENT_PREFIX="/opt/ros/foxy"
_colcon_prefix_chain_bash_source_script "$COLCON_CURRENT_PREFIX/local_setup.bash"
# source this prefix
# setting COLCON_CURRENT_PREFIX avoids determining the prefix in the sourced script
COLCON_CURRENT_PREFIX="$(builtin cd "`dirname "${BASH_SOURCE[0]}"`" > /dev/null && pwd)"
_colcon_prefix_chain_bash_source_script "$COLCON_CURRENT_PREFIX/local_setup.bash"
unset COLCON_CURRENT_PREFIX
unset _colcon_prefix_chain_bash_source_script
apt를 통한 패키지 설치하기
널리 사용되고 검증된 패키지들은 소스 코드 빌드 없이 apt 명령어 하나만으로 빌드된 형태를 사용할 수 있습니다. 다만, 같은 ROS 2일지라도 버전에 따라 재설치를 해줘야 합니다.
$ sudo apt install ros-<DISTRO>-<pkg-name>
$ sudo apt install ros-foxy-turtlesim
일전, 우리가 사용했던 husky관련 패키지들은 모두 apt install 을 통해 설치가 가능하였기에 코드에 대한 고려 없이 바로 실행할 수 있던 것입니다.
ROS 2에서는 husky를 비롯한 다양한 로보틱스 패키지들을 제공하며, 개발 초기에는 이를 사용하여 빠르게 검증을 하고, 이후 직접 Customizing해야 하는 부분은 별도 소스코드 빌드를 통해 업그레이드를 하곤 합니다.
ROS 2 Launch
3종류의 ROS 2 프로그램을 실행한다고 해봅시다.
- A 프로그램 실행 터미널
- B 프로그램 실행 터미널
- C 프로그램 실행 터미널
터미널 3개 정도야 실행하면 그만일 수 있지만, 이 프로그램의 개수가 10개, 20개로 늘어난다고 생각해 봅시다. 😂
실행해야 하는 프로그램들을 모두 하나의 파일로 정리한 다음, 해당 파일만 실행시키면 어떨까요? 이것이 바로 launch의 개념입니다.
ROS 2의 launch파일은 python과 xml을 통해 구성할 수 있는데요, 저는 기본적으로 Python 문법을 선호합니다. 원래 사용하는 언어이기도 하고, 많은 오픈소스 프로젝트들이 Python launch를 사용하고 있기 때문입니다.
- 일전 실행했던 husky 예제 분석을 통해 launch 구조에 대해 짚고 넘어가겠습니다. ros2의 launch 명령어는 다음과 같이 구성되어 있습니다.
$ ros2 launch <package-name> <launch-file-name>
$ ros2 launch husky_gazebo husky_playpen.launch.py
- 해당 launch 파일을 열어보면, 아래와 같습니다.(링크) 참고로, python 파일의 경우 .launch.py로 이름짓는 것이 암묵적인 규칙입니다.
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import PathJoinSubstitution
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
world_file = PathJoinSubstitution(
[FindPackageShare("husky_gazebo"),
"worlds",
"clearpath_playpen.world"],
)
gazebo_launch = PathJoinSubstitution(
[FindPackageShare("husky_gazebo"),
"launch",
"gazebo.launch.py"],
)
gazebo_sim = IncludeLaunchDescription(
PythonLaunchDescriptionSource([gazebo_launch]),
launch_arguments={'world_path': world_file}.items(),
)
ld = LaunchDescription()
ld.add_action(gazebo_sim)
return ld
- 항상 launch file의 분석은 가장 하단부터 시작합니다.
ld = LaunchDescription()
ld.add_action(gazebo_sim)
return ld
LaunchDescription안에 실행을 원하는 프로그램들을 전달하고, launch 명령 시 이들을 실제 실행하는 것이 launch file을 작성하는 이유입니다.
- 상단 옵션을 하나씩 살피겠습니다. launch file에서 특정 폴더, 파일에 접근하기 위해 package에 기반하여 경로를 탐색합니다.
world_file = PathJoinSubstitution(
[FindPackageShare("husky_gazebo"),
"worlds",
"clearpath_playpen.world"],
)
gazebo_launch = PathJoinSubstitution(
[FindPackageShare("husky_gazebo"),
"launch",
"gazebo.launch.py"],
)
- world란 gazebo상의 환경을 나타내는 파일로 아래와 같은 텍스트 형식을 갖습니다. (이후 Gazebo 시간에 살펴보고자 합니다.)
<sdf version='1.4'>
<world name='default'>
<light name='sun' type='directional'>
<cast_shadows>1</cast_shadows>
<pose>0 0 10 0 -0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name='ground_plane'>
...
- 현재 husky_playpen는 다른 launch 파일을 또다시 include하고 있습니다. 이렇게 실행시켜야 할 프로그램들이 많을 때, launch file 자체를 계층 구조로 실행시키는 것도 가능합니다.
gazebo_launch = PathJoinSubstitution(
[FindPackageShare("husky_gazebo"),
"launch",
"gazebo.launch.py"],
)
gazebo_sim = IncludeLaunchDescription(
PythonLaunchDescriptionSource([gazebo_launch]),
launch_arguments={'world_path': world_file}.items(),
)
- 하위 launch file인 gazebo.launch.py 내부는 다음과 같습니다. 복잡한 형태를 갖고 있어 현재 모든 내용을 설명할 수는 없지만, launch 파일은 받드시 LaunchDescription을 포함하고, LaunchDescription으로 전달되는 프로그램들이 실행되는 주체임을 다시 한 번 강조드립니다!
ld = LaunchDescription(ARGUMENTS)
ld.add_action(gz_resource_path)
ld.add_action(node_robot_state_publisher)
ld.add_action(spawn_joint_state_broadcaster)
ld.add_action(diffdrive_controller_spawn_callback)
ld.add_action(gzserver)
ld.add_action(gzclient)
ld.add_action(spawn_robot)
ld.add_action(launch_husky_control)
ld.add_action(launch_husky_teleop_base)
return ld
[간략버전] Launch file 작성법
ROS 2는 워낙 방대한 오프 소스 패키지들을 갖고 있어 약간의 과장을 보태면 코드 한 줄 없이 로봇을 제작할 수도 있습니다.
하지만, 어떠한 프로그램들을 실행하고, 실행 시 옵션은 어떻게 할당해야 하는지는 알고 있어야 합니다. 이러한 이유에서, 프로그래밍 학습보다 앞서 ROS 2의 launch file 작성법을 간단하게 설명하고 넘어가겠습니다.
- 방금 전 생성한 my_first_pkg 패키지 내부에 launch 폴더를 생성하고, 아래 코드를 복사 & 붙여넣기 합니다. (my_first_pkg입니다! my_first_cpp_pkg가 아닙니다.)
# my_first_launch.launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
turtlesim_node = Node(
package="turtlesim",
executable="turtlesim_node",
name="turtlesim_node",
)
return LaunchDescription([
turtlesim_node,
])
| Keyword | Description |
|---|---|
| Node | Node 하나를 실행시킬 수 있는 옵션입니다. |
| package | 실행시킬 Node가 포함된 package를 선택해줍니다. |
| executable | c++ Node의 경우, colcon build를 하면 실행 가능한 프로그램이 생성됩니다. python의 경우도 스크립트를 실행 시키게 되며, 이는 추후 코딩 실습을 거치면 완벽히 이해하실 수 있을 것입니다. |
| parameters | 실행시킬 Node의 추가 매개변수가 있다면 이 부분에 추가됩니다. |
자, 새로운 launch 파일을 실행해보겠습니다.
$ ros2 launch my_first_pkg my_first_launch.launch.py
file 'my_first_launch.launch.py' was not found in the share directory of package...
⇒ 오류가 발생하였습니다! 이는 install 폴더 내부에 symbolic link가 생성되지 않아 발생한 오류입니다.
colcon build 시 colcon은 install/<package_name>/share 폴더 내부에 파일들의 symbolic link를 생성합니다. 더불어 어떠한 파일들에 대해 link를 만들 것인지 전달해주어야 하며, 이는 setup.py에서 설정 가능합니다.
- setup.py 수정
import os
from glob import glob
from setuptools import setup
package_name = 'my_first_pkg'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
],
...
- 다음으로 아래의 커멘드 라인을 순서대로 입력해 주세요!
# 폴더 이동
cd ~/ros2_ws
# colcon build
colcon build --packages-select my_first_pkg
# 변경 적용
source install/setup.bash
# 실행!
ros2 launch my_first_pkg my_first_launch.launch.py
이렇게 launch file을 직접 생성해 보았습니다. 주목할 점은, 제가 보여드린 것이 하나의 예시일 뿐이며, launch file은 여러 형식으로 사용된다는 것입니다.
# my_first_pkg
return LaunchDescription([
turtlesim_node,
])
# husky_gazebo
ld = LaunchDescription(ARGUMENTS)
ld.add_action(gz_resource_path)
ld.add_action(node_robot_state_publisher)
ld.add_action(spawn_joint_state_broadcaster)
ld.add_action(diffdrive_controller_spawn_callback)
ld.add_action(gzserver)
ld.add_action(gzclient)
ld.add_action(spawn_robot)
ld.add_action(launch_husky_control)
ld.add_action(launch_husky_teleop_base)
return ld
ROS 2 자체가 오픈소스에 기반하기 때문에 사용자들마다 각기 다른 방식이 있습니다. 모든 방식을 다 설명할 수는 없으나 가장 널리 사용되는 것들은 대부분 같이 다루어보겠습니다!