Lecture4. ROS 2 Node and Parameter Programming
지난 시간 살펴본 바와 같이 ROS 2에서 프로그램이 실행되는 단위는 Node라는 이름으로 관리됩니다.
여러분들께서 원하는 기능을 수행하는 Node를 생성하고, 이를 담은 패키지를 작성하고, 관련된 패키지들을 묶어 메타패키지를 구성하는 식으로 ROS 2 개발이 진행됩니다.
오늘은 그 시작이 되는 Node의 기초 프로그래밍을 실습해보겠습니다.
첫 코딩 강의의 시작이므로, 제가 사용하는 환경과 셋업도 공유드릴 예정입니다.
- Python 개발 : VSCode와 Copilot
- C++ 개발 : Clion과 Copilot
ROS 2 프로그래밍의 경우 일반적인 프로그래밍과 더불어 tf, 통신 메커니즘, 멀티 프로세싱 등 실제 동작시켜보지 않으면 알 수 없는 기능들의 구현이 잦습니다. 잦은 확인과 Command and Conquer 방식으로 접근해보겠습니다. 😊
ROS 2 Node Programming - Python
- 제가 미리 준비해 둔 패키지를 빌드해봅시다.
cd ~/ros2_ws/src
git clone https://github.com/RB2023ROS/du2023-ros2.git
# 빌드는 항상 WS의 최상단 디렉토리에서 진행합니다!!!
cd ~/ros2_ws
cbp py_node_tutorial
# or
colcon build --packages-select py_node_tutorial
# 빌드 후 항상 소싱!!!
cd ~/ros2_ws
rosfoxy
# or
source install/local_setup.bash
example 1 - Hello ROS 2
- 앞서 빌드된 예시를 실행시켜보겠습니다.
$ ros2 run py_node_tutorial example_node_1
[INFO] [1680692820.096342214] [example_node_1]:
==== Hello ROS 2 ====
모든 예제 코드는 Github 링크에서도 확인할 수 있습니다.
코드 분석
rcl은 ROS Client Libraries의 약자로 ROS 2에서는 rclc, rclcpp, rclpy, rcljs와 같은 다양한 언어를 지원하고 있습니다. 파이썬에서 ROS 2 개발을 하기 위해서는 필수적으로 rclpy의 import가 필요하며 Node의 사용을 위해서 Node class를 import 해야 합니다.
# !/usr/bin/env python3
import rclpy
from rclpy.node import Node
- rclpy 코딩 규칙
ROS 2에서 파이썬 파일을 조회하고 실행하는 일련의 정해진 과정이 있어 아래와 같이 main()부분을 항상 따로 분리하여 작성하도록 합니다.
if __name__ == '__main__':
"""main function"""
main()
- Node 생성
def main(args=None):
"""Do enter into this main function first."""
rclpy.init(args=args)
node = Node('node_name')
node.get_logger().info('\n==== Hello ROS 2 ====')
node.destroy_node()
rclpy.shutdown()
실제 동작을 수행하는 main 함수를 살펴보면 다음과 같은 과정을 거치고 있습니다.
| Function | Description |
|---|---|
| rclpy.init | initialization, 즉 초기화를 하고 있습니다. |
| node = Node(’node_name') | Node를 생성하는 부분으로 앞서 import한 Node class를 사용하고 있습니다. 매개변수로 node의 이름이 들어갑니다. |
| node.destroy_node() | Node를 생성하고 원하는 작업을 모두 수행했다면, 이제 사용했던 Node를 제거해야 할 것입니다. (그래야 불필요한 자원의 낭비를 줄일 수 있겠지요.) |
| rclpy.shutdown() | 이번 예시 첫 부분, rclpy.init()을 통하여 초기화를 해주었습니다. 이제 rclpy를 통한 작업이 모두 끝났으므로 안전하게 종료시켜줍니다. |
⇒ 위 과정이 Python에서 rclpy를 통해 Node를 다루는 기본 절차입니다. (get_logger 부분은 이후에 계속해서 살펴보겠습니다.)
setup.py 수정
- 파이썬 파일을
ros2 run으로 실행하기 위해서 패키지 내 setup.py 파일에 entry_points를 추가해 주어야 합니다.
entry_points={
'console_scripts': [
'example_node_1 = py_node_tutorial.node_example_1:main',
'example_node_2 = py_node_tutorial.node_example_2:main',
'example_node_3 = py_node_tutorial.node_example_3:main',
'example_node_4 = py_node_tutorial.node_example_4:main',
'example_node_5 = py_node_tutorial.node_example_5:main',
],
},
- 작성하는 방법은 다음과 같습니다. ⇒
실행 시 사용될 이름 = <패키지 이름>.<파일 이름>.main
| 실행 시 이름 | 패키지 이름 | 파일 이름 |
|---|---|---|
| example_node_1 | py_node_tutorial | node_example_1 |
진입 지점(entry_points)를 설정하지 않으면 파이썬 파일이 있어도 ros2 run 과 같은 커멘드를 사용할 수 없게 됩니다.
[과제] 나만의 Node를 구현하는 파이썬 스크립트를 생성하여 ros2 run으로 실행할 수 있도록 해보세요!
example 2 - timer
- 계속해서 Timer 예시입니다. 로봇은 일반적으로 실행된 이후 계속해서 작업을 수행해야 하기에 주기적으로 무언가를 실행하는 일이 잦습니다. 이를 구현하는 Timer를 살펴봅시다.
$ ros2 run py_node_tutorial example_node_2
==== Hello ROS 2 : 1====
==== Hello ROS 2 : 2====
==== Hello ROS 2 : 3====
==== Hello ROS 2 : 4====
==== Hello ROS 2 : 5====
- main문에 추가된 create_timer와 timer_callback 함수를 확인할 수 있습니다.
def timer_callback():
"""Timer will run this function periodically."""
global count
count += 1
print(f'==== Hello ROS 2 : {count}====')
def main(args=None):
"""Do enter into this main function first."""
rclpy.init(args=args)
node = Node('node_name')
node.create_timer(0.2, timer_callback)
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
timer 생성 시 create_timer라는 함수가 사용됩니다.
| Code | Description |
|---|---|
| timer_period_sec | 실행 주기 (초) |
| callback | 해당 주기마다 실행될 함수 |
동기/비동기의 측면에서 timer와 Node의 분석은 이후 강의에서 이어집니다. 지금은 기본적인 코딩에만 집중하겠습니다!
example 3 - spin_once, spin
- Node의 상태를 살피면서 반복 실행시키는 spin 함수에 대해 좀 더 자세하게 살펴봅니다.
$ ros2 run py_node_tutorial example_node_3
==== Hello ROS 2 : 1====
==== Hello ROS 2 : 2====
==== Hello ROS 2 : 3====
...
- Node는 상태를 지속 유지하면서 변경된 내용에 따라 지정된 동작을 수행해야 합니다. 이는 로봇 프로그램에서 매우 보편적인 작업으로, ROS 2에서는 **spin()**이라는 이름의 함수로 기능을 제공하고 있습니다.
def main(args=None):
"""Do enter into this main function first."""
rclpy.init(args=args)
node = Node('node_name')
node.create_timer(0.2, timer_callback)
# 1. spin_once() will run node only once.
# timeout_sec: Seconds to wait.
# Block forever if ``None`` or negative. Don't wait if 0.
rclpy.spin_once(node, timeout_sec=10)
# # 2. spin() will run node until Ctrl+C.
rclpy.spin(node)
# # 3. spin_once() with while loop will run node periodically.
while True:
rclpy.spin_once(node, timeout_sec=10)
node.destroy_node()
rclpy.shutdown()
spin을 비롯하여 spin_once, spin_until_future_complete와 같이 프로그램의 실행을 관리하기 위한 다양한 추가 함수들이 존재하며, 예시에서는 3가지 자주 사용되는 패턴을 제시하고 있습니다.
| Code | Description |
|---|---|
| spin_once() | Node를 단 한번만 실행 |
| spin() | Ctrl+C 입력 전까지 계속해서 실행 |
| while + spin_once() | spin과 더불어 다른 무언가를 추가할 수 있는 패턴 |
example 4 - OOP Node
- 예제 실행의 결과는 이전과 같습니다. 하지만 구현에서 OOP를 사용한다는 차이를 갖는 예시입니다.
$ ros2 run py_node_tutorial example_node_4
[INFO] [1657348011.971419700] [composition_example_node]: ==== Hello ROS 2 : 1====
[INFO] [1657348012.163466100] [composition_example_node]: ==== Hello ROS 2 : 2====
[INFO] [1657348012.363590700] [composition_example_node]: ==== Hello ROS 2 : 3====
- class를 사용하여 Node를 구현한 모습을 확인할 수 있습니다.
class NodeClass(Node):
"""Second Node Class.
Just print log periodically.
"""
def __init__(self):
"""Node Initialization.
You must type name of the node in inheritanced initializer.
"""
super().__init__('composition_example_node')
self.create_timer(0.2, self.timer_callback)
self._count = 1
def timer_callback(self):
"""Timer will run this function periodically."""
self.get_logger().info(f'==== Hello ROS 2 : {self._count}====')
self._count += 1
ROS 1과 달리, ROS 2의 OOP 구현은 Node를 상속받습니다. (때문에 생성 시, Node이름을 super().__init__()안에 넣어주어야 합니다.) 이렇게 객체지향을 사용하면 Node의 기능들을 적극 활용하여 더욱 쉽고 강력한 ROS 2 개발이 가능해집니다.
- rclpy logger
super().__init__('node_name')
...
node.get_logger().info('\n==== Hello ROS 2 ====')
ROS 1의 rospy.loginfo()와 같이 rclpy에서도 get_logger()라는 logging API를 제공합니다. 다만, rclpy의 logger는 Node에 종속되는 개념입니다. (ROS 2에서는 여러 Node가 하나의 프로세스 안에서 실행될 수 있기 때문입니다.)
get_logger()를 사용하면 일반적인 print 콘솔 출력과는 달리, 실행중인 Node이름, 시간, 위험성 등을 디버깅할 수 있어 이후 복잡한 시스템에서 큰 도움이 됩니다.
example 5 - Logger Level
- 기본 node 프로그래밍의 마지막 예시입니다.
$ ros2 run py_node_tutorial example_node_5
[INFO] [1657348108.163389800] [node_name]: ==== Hello ROS 2 : 1====
[WARN] [1657348108.163810900] [node_name]: ==== Hello ROS 2 : 1====
[ERROR] [1657348108.164126200] [node_name]: ==== Hello ROS 2 : 1====
[FATAL] [1657348108.164514300] [node_name]: ==== Hello ROS 2 : 1====
...
ROS 2에서는 위험도에 따라서 다른 logger level을 적용할 수 있습니다. info를 기준으로 아래로 갈수록 높은 레벨의 log이며, 제일 심각한 error와 fatal의 경우, 콘솔 출력시에도 빨간 글씨로 보이는 것을 확인할 수 있습니다.
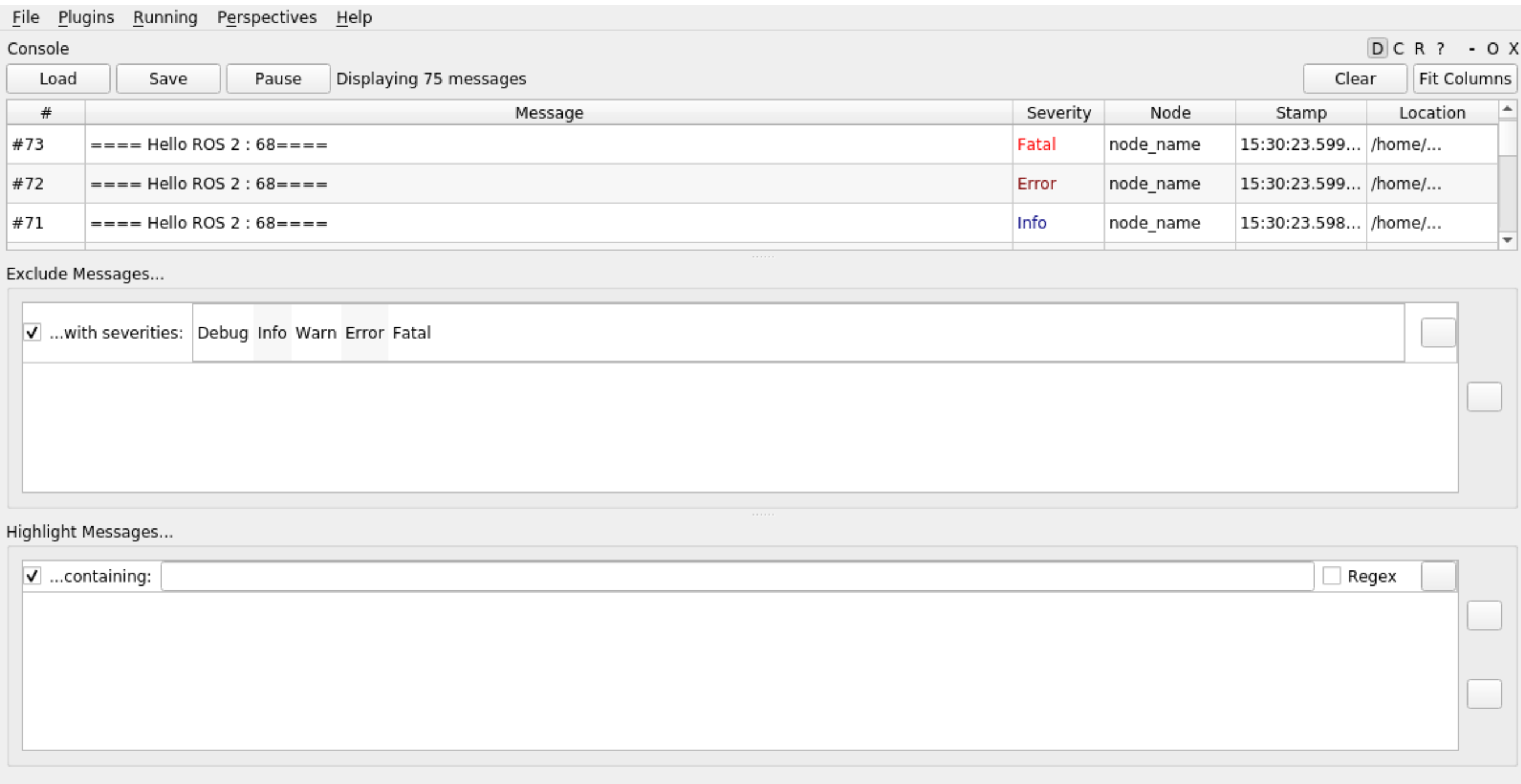
- debug의 경우 실제 콘솔 출력으로는 나타나지 않으며, 효과적인 Tracking을 위해 이후 학습할 rqt console 사용을 권장합니다.
ROS 2 Parameter Programming - Python
모터의 게인값, 카메라의 Focal Lenght, Intrinsic, Extrinsic Parameter, Point Cloud의 resolution과 min/max range 등 로봇 프로그래밍 시 수많은 매개변수들이 사용됩니다.
ROS 2에서는 각종 매개변수를 다룰 수 있는 별도의 Parameter Server를 제공하며, Node들은 모두 개별 Parameter Server를 갖고 있습니다.
- 예제 Package 빌드와 실행
$ colcon build --packages-select py_param_tutorial
$ source install/local_setup.bash
$ ros2 run py_param_tutorial param_example
[INFO] [1672390971.030532687] [param_ex_node]:
string_param: world
int_param: 119
float_param: 3.1415
arr_param: [1, 2, 3]
nested_param.string_param: Wee Woo
⇒ param_ex_node에서 5종류의 매개변수가 선언되었습니다. 이들을 확인하는 커멘드 라인을 배워봅시다.
- ros2 param list
$ ros2 param list
/param_ex_node:
arr_param
float_param
int_param
nested_param.string_param
string_param
use_sim_time
⇒ param_ex_node의 Parameter Server는 현재 6개의 값을 갖고 있습니다.
- 개별 Parameter들의 값을 다루고 싶은 경우 ros2 param get/set 을 사용합니다.
$ ros2 param get /param_ex_node arr_param
Integer values are: array('q', [1, 2, 3])
$ ros2 param set /param_ex_node arr_param '[1,2,3,4]'
Set parameter successful
$ ros2 param get /param_ex_node arr_param
Integer values are: array('q', [1, 2, 3, 4])
⇒ node 이름과 매개변수 이름을 모두 필요로 함에 주의합니다.
코드 분석
- parameter의 생성은 node 내에서 이루어지며, declare_parameter를 통해 생성합니다. (함수의 두번째 인자는 기본값입니다.)
class ParamExNode(rclpy.node.Node):
def __init__(self):
super().__init__('param_ex_node')
self.declare_parameter('string_param', 'world')
self.declare_parameter('int_param', 119)
self.declare_parameter('float_param', 3.1415)
self.declare_parameter('arr_param', [1,2,3])
self.declare_parameter('nested_param.string_param', 'Wee Woo')
⇒ nested_param과 같이 parameter는 계층 구조를 가질 수 있으며 온점을 통해 구분할 수 있습니다. ⇒ 현재 string_param이라는 이름을 가진 parameter가 두 종류 존재하지만 서로 소속된 계층이 달라 공존할 수 있는 것입니다.
- 선언된 매개변수의 값은 get_parameter를 통해 확인 가능합니다. get_parameter 자체는 Object이고, value 속성이 실제 값을 갖고 있음에 주의합니다.
string_param = self.get_parameter('string_param')
int_param = self.get_parameter('int_param')
float_param = self.get_parameter('float_param')
arr_param = self.get_parameter('arr_param')
nested_param = self.get_parameter('nested_param.string_param')
self.get_logger().info(f"\nstring_param: {string_param.value} \
\nint_param: {int_param.value} \
\nfloat_param: {float_param.value} \
\narr_param: {arr_param.value} \
\nnested_param.string_param: {nested_param.value}"
)
- parameter는 launch file에서도 설정할 수 있는데요. 예시를 우선 실행해봅시다. - 변경된 Parameter값도 확인해봅시다.
$ ros2 launch py_param_tutorial launch_with_param.launch.py
...
[param_example-1] [INFO] [1672387864.135213913] [param_example]:
[param_example-1] string_param: Hello
[param_example-1] int_param: 112
[param_example-1] float_param: 3.1415
[param_example-1] arr_param: [1, 2, 3]
$ ros2 launch py_param_tutorial launch_with_yaml.launch.py
...
[param_example-1] [INFO] [1680857428.211772092] [param_example]:
[param_example-1] string_param: Yaml Yaml
[param_example-1] int_param: 5
[param_example-1] float_param: 3.14
[param_example-1] arr_param: ['I', 'love', 'ROS 2']
[param_example-1] nested_param.string_param: Ooh Wee
- Node를 실행하는 launch file을 기억하시지요? Node의 parameters 옵션을 사용하면 코드를 직접 바꾸지 않고 parameter의 변경이 가능합니다.
def generate_launch_description():
param_ex_node = Node(
package='py_param_tutorial',
executable='param_example',
name='param_example',
output='screen',
parameters=[
{'string_param': 'Hello'},
{'int_param': 112},
],
)
- parameter가 매우 많은 경우에는 yaml 형식의 파일을 사용해 관리할 수 있는데요, yaml 파일을 사용하는 launch 파일의 일부를 함께 살펴봅시다.
def generate_launch_description():
config = os.path.join(
get_package_share_directory('py_param_tutorial'), 'config', 'params.yaml'
)
param_ex_node = Node(
package = 'py_param_tutorial',
executable = 'param_example',
name = 'param_example',
output='screen',
parameters = [config]
)
return LaunchDescription([
param_ex_node
])
추가 설명 - os.path.join, get_package_share_directory를 사용하는 이유!
- yaml 파일은 config/params.yaml에 위치하고 있습니다. parameter 관리 용도로 사용하기 위해서 yaml 파일은 일정한 규칙을 갖춰야 합니다.
<node-name>:
ros__parameters:
<param-name>: <param-value>
...
<nested-layer-name>:
<param-name>: <param-value>
param_example:
ros__parameters:
string_param: "Yaml Yaml"
int_param: 5
float_param: 3.14
arr_param: ['I', 'love', 'ROS 2']
nested_param:
string_param: "Ooh Wee"
- 이렇게 새로운 폴더와 파일을 추가한 경우, python 패키지의 setup.py를 수정해주어야 하며 패키지 빌드도 새로 해주어야 합니다.
import os
from glob import glob
from setuptools import setup
package_name = 'py_param_tutorial'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'config'), glob('config/*.yaml')),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
],
- launch file에 추가된 내용을 다시 살펴보면, 방금 전의 yaml 파일을 불러와서 node의 실행 option에 전달하고 있습니다.
Namespace Parameter
아직 이른 감이 있지만, 다수의 로봇을 다루는 경우를 생각해봅시다. 종류는 같지만 별도의 Parameter가 필요할 것입니다.
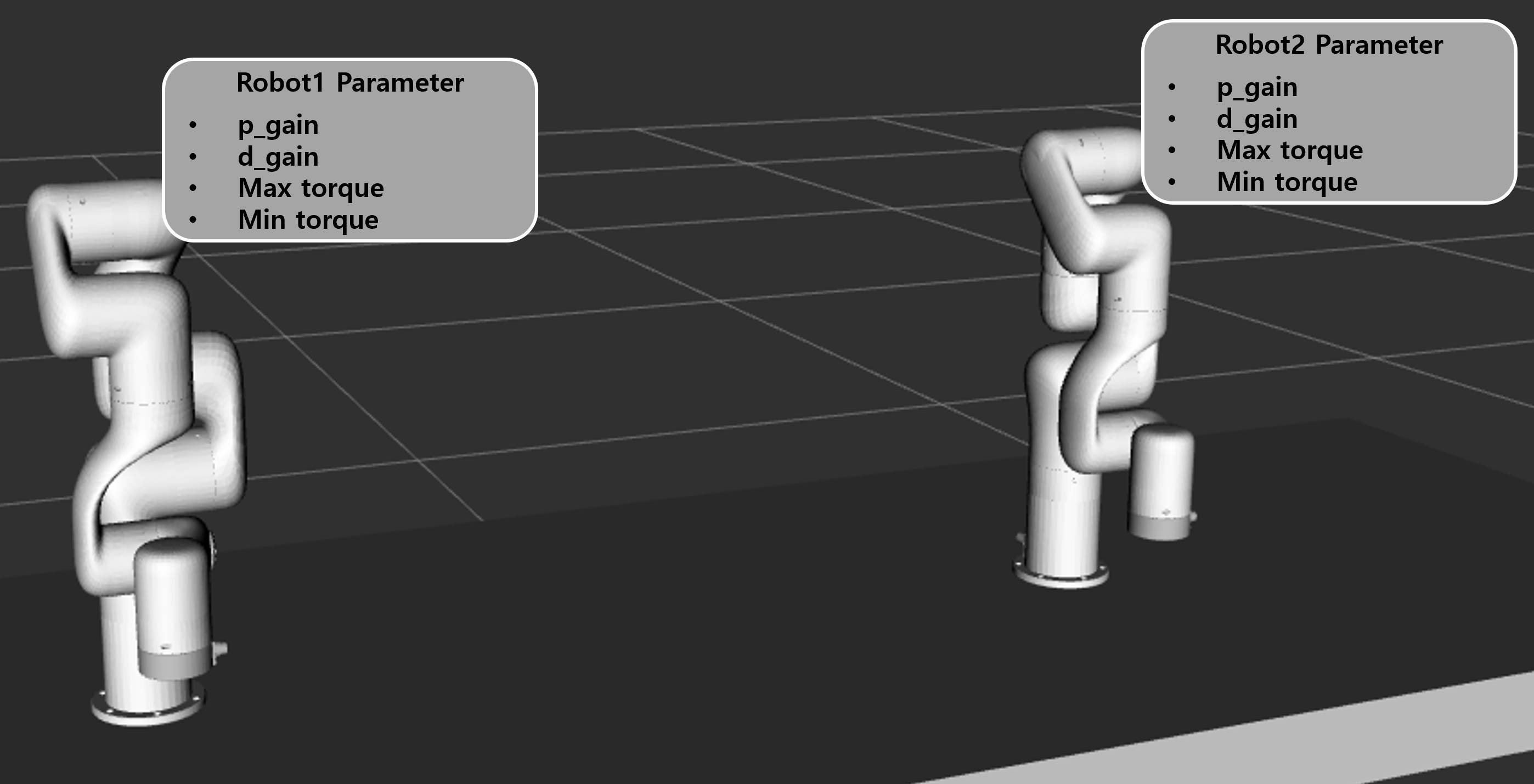
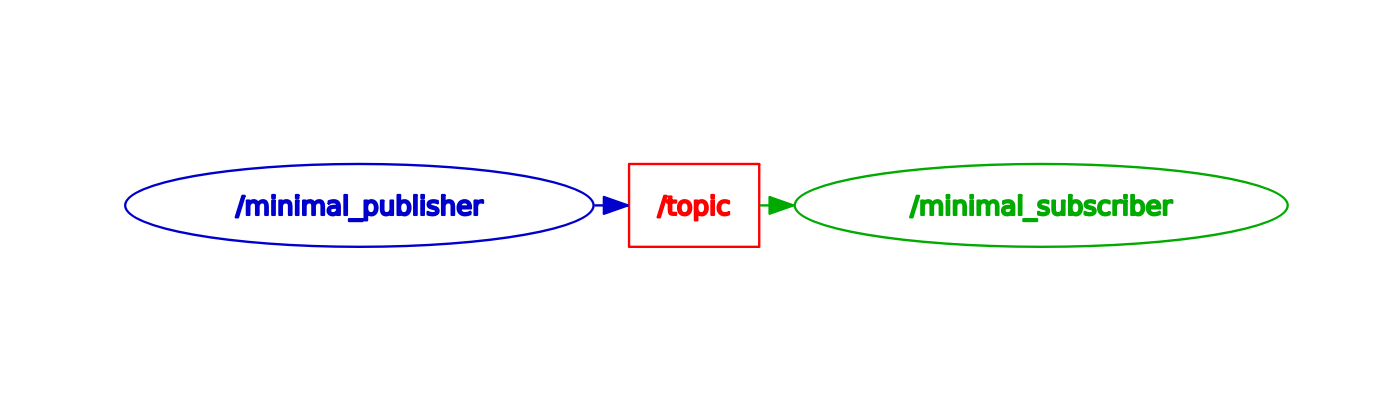
⇒ 이러한 경우를 대비해서 ROS 2에서는 namespace라는 기능을 지원합니다. topic과 node 앞에 별도의 접미사를 추가하여 서로 다른 객체임을 구별하는 방식입니다.
이를 지금 언급하는 이유는, Parameter의 namespace를 지정하는 일이 매우 빈번하고 그 사용 방식이 node나 topic과는 조금 다르기 때문입니다.
- namespace를 지정하는 가장 일반적인 방법은 launch 파일에서 옵션을 지정하는 것입니다.
param_ex_node = Node(
package = 'py_param_tutorial',
# namespace 지정!
namespace = 'robot1',
executable = 'param_example',
name = 'param_example',
output='screen',
parameters = [config]
)
- 예시를 다시 실행시킨 다음 어떤 결과를 얻게 되는지 살펴봅시다.
$ ros2 launch py_param_tutorial launch_with_yaml.launch.py
...
[param_example-1] [INFO] [1680861992.330212575] [robot1.param_example]:
[param_example-1] string_param: world
[param_example-1] int_param: 119
[param_example-1] float_param: 3.1415
[param_example-1] arr_param: [1, 2, 3]
[param_example-1] nested_param.string_param: Wee Woo
⇒ yaml 파일이 반영되지 않은 결과를 얻었습니다!
- yaml 파일에도 namespace를 반영해주어야 하기 때문이며 예를 들어 robot1이라는 namespace를 반영하고 싶다면 yaml 파일을 아래와 같이 변경해야 합니다.
robot1/param_example:
ros__parameters:
string_param: "Yaml Yaml"
int_param: 5
float_param: 3.14
arr_param: ['I', 'love', 'ROS 2']
nested_param:
string_param: "Ooh Wee"
- 하지만 namespace를 바꿀 때마다 새로운 yaml파일을 만들 수는 없습니다. 이를 대비하여 ROS 2에서는 다음과 같은 yaml 문법을 허용합니다.
/**:
ros__parameters:
string_param: "Namespaced Param"
int_param: 10
float_param: 2.718
arr_param: ['I', 'absolutely', 'love', 'ROS 2']
nested_param:
string_param: "Yeah Hee"
- 새롭게 작성한 yaml 파일을 반영한 새로운 예시를 실행해봅시다.
$ ros2 launch py_param_tutorial launch_with_namespace.launch.py
...
[param_example-1] [INFO] [1680862245.965886805] [robot1.param_example]:
[param_example-1] string_param: Namespaced Param
[param_example-1] int_param: 10
[param_example-1] float_param: 2.718
[param_example-1] arr_param: ['I', 'absolutely', 'love', 'ROS 2']
[param_example-1] nested_param.string_param: Yeah Hee
다수의 센서를 사용하거나, 다수의 로봇을 사용하는 경우 지금 학습한 namespace를 꼭 기억해주세요!!
ROS 2 Node Programming - C++
- 앞선 Node 프로그래밍 예시들을 C++에서 구현하는 방법을 배워봅시다. 제가 미리 준비해 둔 패키지를 빌드하며 시작하겠습니다.
# 빌드는 항상 WS의 최상단 디렉토리에서 진행합니다!!!
cd ~/ros2_ws
cbp cpp_node_tutorial
# or
colcon build --packages-select cpp_node_tutorial
# 빌드 후 항상 소싱!!!
cd ~/ros2_ws
rosfoxy
# or
source install/local_setup.bash
example 1 - Hello ROS 2
- 파이썬 때와 마찬가지로, 앞서 빌드된 예시를 실행시켜보겠습니다.
$ ros2 run cpp_node_tutorial example_node_1
[INFO] [1680692820.096342214] [example_node_1]:
==== Hello ROS 2 ====
ROS 2 C++ 코드 빌드와 실행
ROS 2에서는 C++ 코드의 빌드를 위해 CMake를 사용하고 있습니다. 코드 분석 이전에 새로운 코드를 생성하고, 빌드하는 과정을 간단히 설명해보고자 합니다.
-
새로운 코드 생성 -C++ 코드는 패키지 내 src 폴더에 생성하는 것이 관례입니다. 단, 작업 전 해당 패키지가 C++용으로 만들어져 있는지 꼭 확인하셔야 합니다. (ament_cmake를 사용했던 점을 복기해봅시다.)
-
코드 작성- 우선, 패키지 내 존재하는 예시 혹은 copilot을 사용하여 가장 간단한 node code를 생성하겠습니다.
-
CMakeLists.txt 수정
find_package(rclcpp REQUIRED)
add_executable(test_node src/test.cpp)
ament_target_dependencies(test_node rclcpp)
install(
TARGETS
test_node
DESTINATION
lib/${PROJECT_NAME}
)
| Function | Description |
|---|---|
| find_package | 필요한 종속성들을 추가합니다. ROS 2 종속성 뿐만 아니라, 3rd party 종속성도 여기에서 추가됩니다. |
| add_executable | Build 후 실행 파일을 생성합니다. (일반적인 CMake 과정과 동일합니다.) |
| ament_target_dependencies | CMake의 target_link_libaries와 동일한 역할을 하지만, ROS 2에서 사용을 위해 편의성이 추가된 Function입니다. |
| install | 빌드 결과물을 특정 디렉토리에 위치시킵니다. |
모든 CMake function들은 ament_package() 상단에 위치해야 합니다!
- 다음으로, 새로운 코드의 빌드 작업을 함께 해봅시다.
# 빌드는 항상 WS의 최상단 디렉토리에서 진행합니다!!!
cd ~/ros2_ws
cbp cpp_node_tutorial
# or
colcon build --packages-select cpp_node_tutorial
# 빌드 후 항상 소싱!!!
cd ~/ros2_ws
rosfoxy
# or
source install/local_setup.bash
# 새롭게 빌드한 예시 실행
$ ros2 run cpp_node_tutorial test_node
[INFO] [1681299676.469101345] [example_node_1]: ==== Hello ROS 2 ====
코드 분석
- python 코드 작성 시 rclpy를 import 했던 것처럼, cpp 코딩 시 rclcpp을 import 해야 합니다. (해당 header안에는 memory, vector, string 등 범용적으로 사용되는 웬만한 라이브러리가 포함되어 있습니다.)
#include <rclcpp/rclcpp.hpp>
- Node 생성
int main(int argc, char **argv) {
// Initialize ROS 2
rclcpp::init(argc, argv);
// Create a node
auto node = rclcpp::Node::make_shared("example_node_1");
// Log a message
RCLCPP_INFO(node->get_logger(), "==== Hello ROS 2 ====");
// Shutdown ROS 2
rclcpp::shutdown();
return 0;
}
- python 코드 분석 시 대부분의 함수를 살펴보았으므로 간단하게 짚고 넘어가겠습니다.
| Function | Description |
|---|---|
| rclcpp::init(argc, argv) | initialization, 즉 초기화를 하고 있습니다. |
| rclcpp::Node::make_shared() | Node를 생성하는 부분으로 앞서 import한 Node class를 사용하고 있습니다. 매개변수로 node의 이름이 들어갑니다. |
| rclcpp::shutdown() | 이번 예시 첫 부분, rclpy.init()을 통하여 초기화를 해주었습니다. 이제 rclpy를 통한 작업이 모두 끝났으므로 안전하게 종료시켜줍니다. |
| 스마트 포인터를 사용하기 때문에 destroy_node라는 것은 별도로 호출하지 않습니다. |
example 2 - timer
- 계속해서 Timer 예시입니다.
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
static int count = 0;
void timer_callback(){
std::cout << "==== Hello ROS 2 : " << count << " ====" << std::endl;
count++;
}
int main(int argc, char **argv) {
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("example_node_2");
auto timer = node->create_wall_timer(200ms, timer_callback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
| Code | Description |
|---|---|
| create_wall_timer | Timer 생성, 실행 주기와 callback을 매개변수로 갖습니다. |
| timer_callback | 특정 해당 주기마다 실행될 함수 |
- Timer, Node와 같은 인터페이스들은 모두 스마트 포인터를 사용하고 있습니다. 따라서 함수의 인자로 전달하거나, 내부 함수를 호출할 시 포인터라는 점을 기억하시어 코딩하셔야 합니다.
auto node => std::shared_ptr<rclcpp::Node>
auto timer => std::shared_ptr<rclcpp::Timer>
example 3 - OOP Node
- OOP를 사용한 Timer Node 구현입니다.
#include "rclcpp/rclcpp.hpp"
class NodeClass: public rclcpp::Node {
public:
NodeClass(): Node("example_node_4") {}
};
int main(int argc, char **argv) {
rclcpp::init(argc, argv);
auto node = std::make_shared<NodeClass>();
RCLCPP_INFO(node->get_logger(), "==== Hello ROS 2 ====");
rclcpp::shutdown();
return 0;
}
- 모든 rclcpp Node들은 반드시 rclcpp::Node를 public 상속받아야 합니다.
class NodeClass: public rclcpp::Node {
public:
NodeClass(): Node("example_node_4") {}
};
상속을 받은 만큼 구현 시 주의해야 하는 부분들이 있으며, 생성자는 반드시 Access Modifier public을 가져야 합니다.
- rclcpp logger
RCLCPP_INFO(node->get_logger(), "==== Hello ROS 2 ====");
python의 get_logger()와 동일하지만, RCLCPP_INFO로 wrapping이 되어있다는 차이점을 기억하시기 바랍니다.
- OOP 구현 시 새로운 Node 생성을 위해 template을 사용합니다.
auto node = std::make_shared<NodeClass>();
example 4 - spin_once, spin
- Node의 상태를 살피면서 반복 실행시키는 spin 함수가 추가되며 OOP 구현이 보입니다.
class NodeClass: public rclcpp::Node {
private:
size_t count;
rclcpp::TimerBase::SharedPtr timer;
void timer_callback() {
RCLCPP_INFO(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
count++;
}
public:
NodeClass() : Node("example_node_5") {
timer = this->create_wall_timer(
std::chrono::milliseconds(200),
// timer_callback,
std::bind(&NodeClass::timer_callback, this)
);
}
};
int main(int argc, char **argv) {
rclcpp::init(argc, argv);
auto node = std::make_shared<NodeClass>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
- rclpy와 마찬가지로, rclcpp에서도 spin, spin_some, spin_until_future_complete등 다양한 기능을 제공하는데요. spin을 이해하기 위해서 많은 배경지식이 필요하니 구체적인 내용은 이후에 살펴보고 지금은 기능 구현에 집중하겠습니다.
rclcpp::spin(node);
- Timer를 비롯한 인터페이스들은 모두 shared_ptr 타입을 갖습니다. SharedPtr은 ROS 2 단에서 편의를 위해 wrapping한 것입니다. - 참고 링크
rclcpp::TimerBase::SharedPtr timer;
example 5 - Logger Level
- 기본 node 프로그래밍의 마지막 예시였습니다. 실행 후 간단하게 살펴보고 넘어가겠습니다.
class NodeClass: public rclcpp::Node {
private:
size_t count;
rclcpp::TimerBase::SharedPtr timer;
void timer_callback() {
RCLCPP_DEBUG(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_INFO(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_WARN(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_ERROR(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_FATAL(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
count++;
}
public:
NodeClass() : Node("example_node_5") {
timer = this->create_wall_timer(
std::chrono::milliseconds(200),
std::bind(&NodeClass::timer_callback, this)
);
}
};
int main(int argc, char **argv) {
rclcpp::init(argc, argv);
auto node = std::make_shared<NodeClass>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
- 코드 중 logger level을 지정하는 부분을 확인 가능합니다.
RCLCPP_DEBUG(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_INFO(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_WARN(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_ERROR(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
RCLCPP_FATAL(this->get_logger(), "==== Hello ROS 2 : %d ====", count);
ROS 2 Parameter Programming - C++
- 예제 Package 빌드와 실행
$ colcon build --packages-select cpp_param_tutorial
$ source install/local_setup.bash
$ ros2 run cpp_param_tutorial cpp_param_example
[INFO] [1681300487.037502527] [param_ex_node]:
str: world
int: 119
double: 3.141500
arr: [1, 2, 3]
nested: Wee Woo
코드 분석
- rclcpp 코드에서 parameter의 생성과 사용은 다음과 같습니다.
| Code | Description |
|---|---|
| declare_parameter(name, default_value) | parameter의 생성 |
| get_parameter() | parameter object를 받아옵니다. |
| as_() | get_parameter 결과는 object로 실제 값을 파싱하기 위해서 필요합니다. |
- 코드를 통해서도 확인이 가능하며, 최소 3 줄의 라인이 필요하기 때문에 get_parameter와 as_type을 한번에 사용하기도 합니다.
class ParamExNode : public rclcpp::Node
{
public:
ParamExNode() : Node("param_ex_node") {
this->declare_parameter("string_param", "world");
...
rclcpp::Parameter str_param = this->get_parameter("string_param");
...
std::string my_str = str_param.as_string();
- 간소화 버전
this->declare_parameter("string_param", "world");
auto my_str = this->get_parameter("string_param").as_string();
- cpp로 구현된 node의 parameter도 ros2 launch와 yaml 파일을 통해 손쉽게 수정이 가능합니다.
$ ros2 launch cpp_param_tutorial launch_with_yaml.launch.py
...
[cpp_param_example-1] [INFO] [1681301614.005450889] [param_example]:
[cpp_param_example-1] str: Yaml Yaml
[cpp_param_example-1] int: 5
[cpp_param_example-1] double: 3.141500
[cpp_param_example-1] arr: [1, 2, 3]
[cpp_param_example-1] nested: Ooh Wee