Lecture6. ROS 2 Tools

ROS 2는 rqt라는 프로그램의 집합을 제공합니다. rqt의 GUI를 사용하면 데이터 시각화, 코딩 없이 통신 메커니즘과 상호 작용, tf frame의 시각화 등 ROS 2 프로그래밍이 매우 매우 편해집니다.
이번 시간을 통해 몇가지 자주 사용되는 rqt들을 살펴보고, 약간의 실습도 진행해보겠습니다.
- rqt의 실행은 다음과 같습니다.
rqt
⇒ 초기 실행 시 빈 화면이 등장하지만, 상단 탭을 통해 수많은 응용 프로그램들을 확인할 수 있습니다.
rqt_graph
rqt_graph는 node와 topic에 대해 시각화하여 한 장의 이미지를 보여주는 툴로, 가장 많이 사용되는 Rqt Tool입니다.
- rqt_graph는 자주 사용되는 만큼 보통 개별적으로 실행합니다.
rqt_graph
- 사진에 보이는 동그라미는 node를, 네모는 topic을 의미합니다. 더불어 화살표의 방향을 통해 topic의 송/수신자를 구별할 수 있습니다.
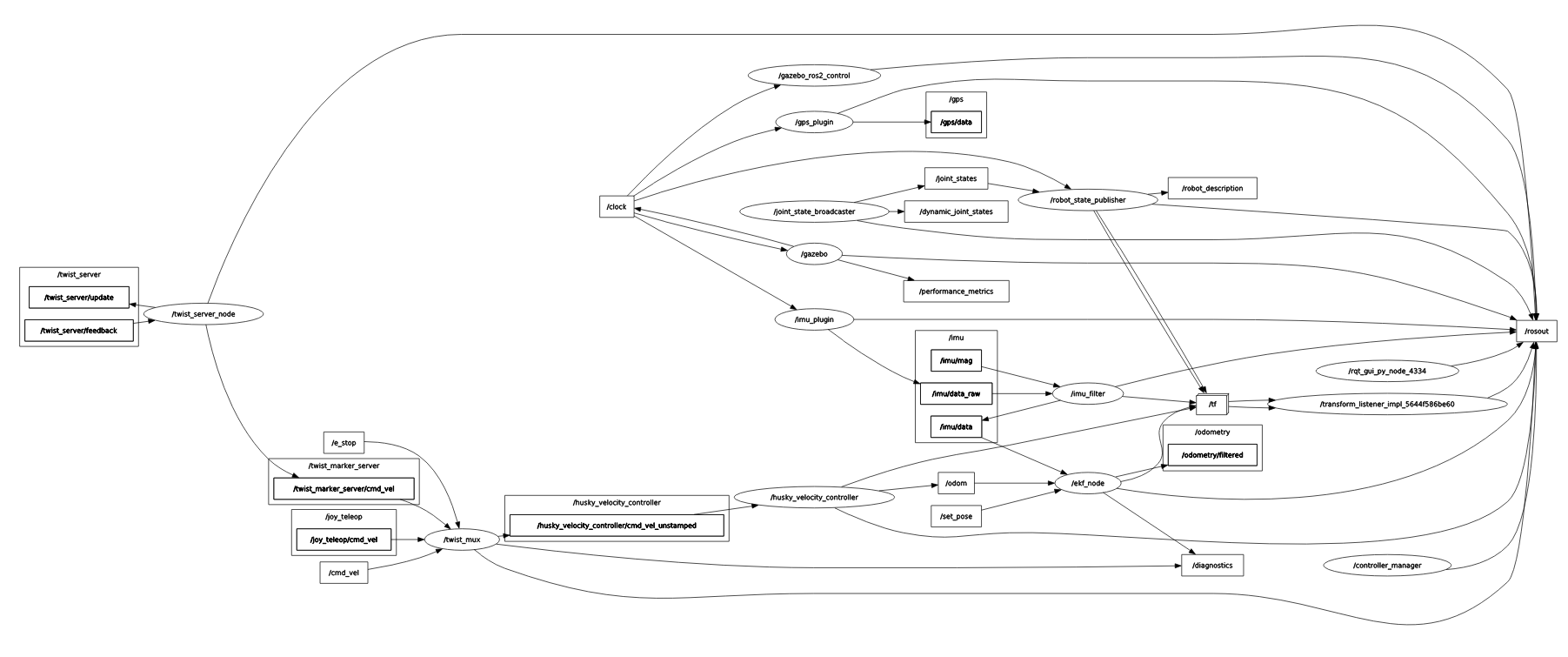
- 더불어 rqt_graph는 다양한 시각화 옵션들을 제공하고 있습니다.
| Node Option | Hide Option | ETC |
|---|---|---|
| Node Only | Dead sinks | Group Option |
| Nodes/Topics (Active) | Leaf Topics | Actions |
| Nodes/Topics (All) | Debug | tf |
| tf | Images | |
| Unreachable | Highlight | |
| Params | Fit |
⇒ 참고로, rqt_graph의 node에 마우스 커서를 가져가면 관련 topic들의 색상을 바꿔줍니다. (Highlight)
Topic 이름을 잘못 생성하거나 겹치는 경우, 코드 차원에서 디버깅이 힘들지만 rqt_graph를 사용하면 손쉽게 판별 가능합니다.
Topic Tools - Message Publisher & Topic Monitor
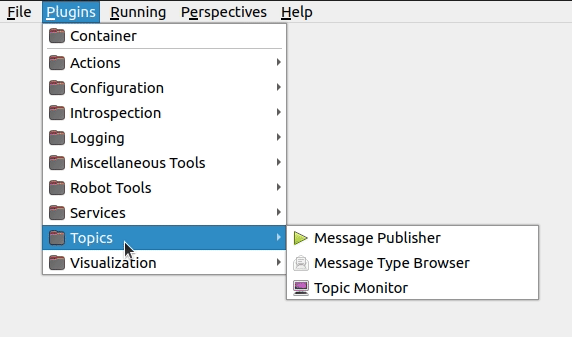
rqt 상단의 탭에서 다음과 같이 화면을 구성합니다.
- plugins ⇒ topics ⇒ Message Publisher
- pulgins ⇒ topics ⇒ Topic Monitor
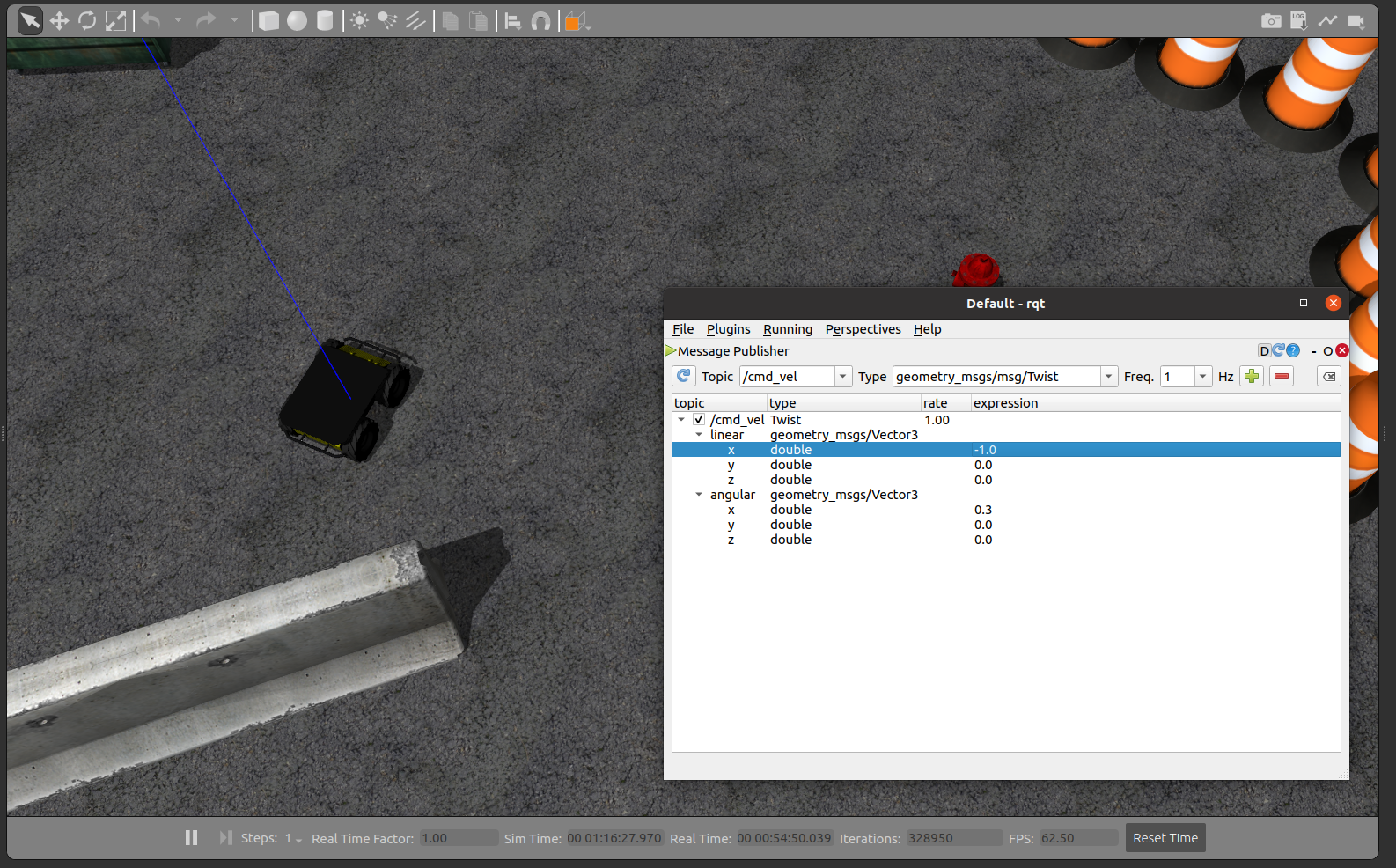
- message publisher를 사용하면 코딩 없이 원하는 topic을 publish 가능합니다. Topic Msg에 원하는 데이터를 채워넣은 뒤, 체크박스를 클릭하면 로봇이 움직이기 시작합니다. 실습을 위해 일전 husky gazebo를 실행시키고 로봇을 제어해 보겠습니다.
# Terminal 1
ros2 launch husky_gazebo husky_playpen.launch.py
# Terminal 2
rqt
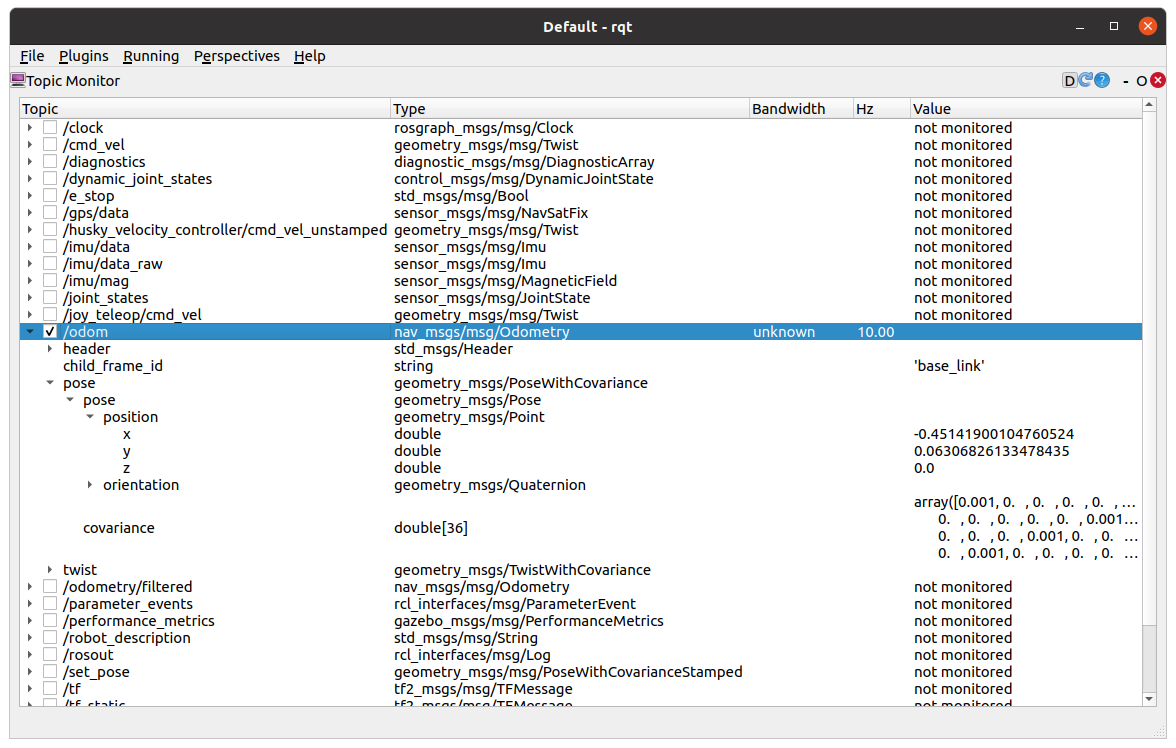
- Topic Monitor를 사용하면, Topic 데이터들을 효과적으로 모니터링 가능합니다. Topic Publisher와 동일하게 체크박스를 눌러 topic을 선택한 뒤, 변하는 데이터를 확인해봅시다.
Service Tools - Service Caller
rqt 상단의 탭에서 다음과 같이 화면을 구성합니다.
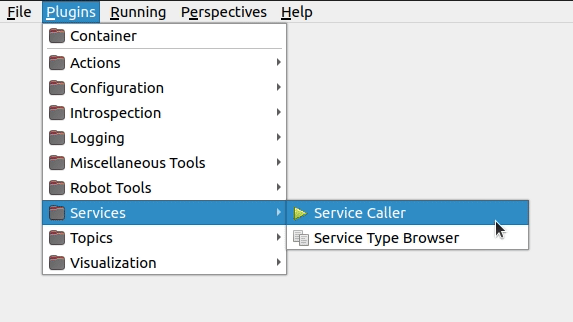
- plugins ⇒ services ⇒ Service Caller
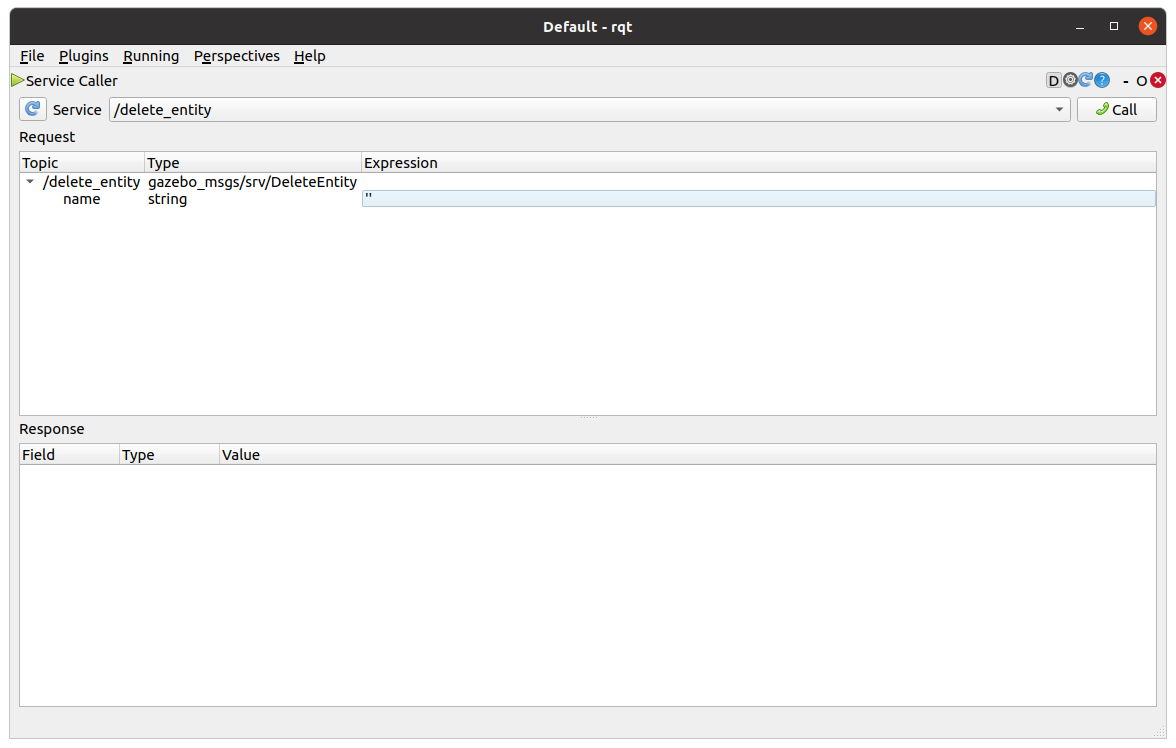
- Service Caller를 통해 코딩 없이 간편하게 Service Call이 가능합니다. Service Srv에 원하는 데이터를 채워넣은 뒤, Call 버튼을 클릭하면 Request와 Response를 받을 수 있습니다. Gazebo상의 물체를 제거하는 간단한 실습을 해봅시다.
- gazebo_ros와 rqt를 실행합니다.
# Terminal 1 - Run Gazebo ROS
ros2 launch gazebo_ros gazebo.launch.py
# Terminal 2 - rqt & Service Caller
rqt
- rqt Service Caller를 실행시킨 뒤, /delete_entity service를 선택합니다.
- gazebo상에서 모델을 등장시킨 뒤, 해당 모델의 이름을 service srv를 통해 전달하면 물체가 사라집니다!
Rviz2
Rviz2는 ROS 2 개발 중 발생하는 수많은 로봇 데이터들을 시각화해주는 고마운 툴입니다. 다른 rqt 프로그램들은 몰라도, Rviz2의 사용법은 반드시 익혀두시기를 추천합니다.
- rviz2 예시를 위해 좀 더 갖춰진 gazebo 환경을 실행해보겠습니다.
# install requirements
cd du2023-ros2
./setup_scripts.sh
# package build
cd ~/ros2_ws
cbp src_controller && source install/local_setup.bash
cbp src_gazebo && source install/local_setup.bash
cbp src_odometry && source install/local_setup.bash
# demo env launch
ros2 launch src_gazebo racecourse.launch.py
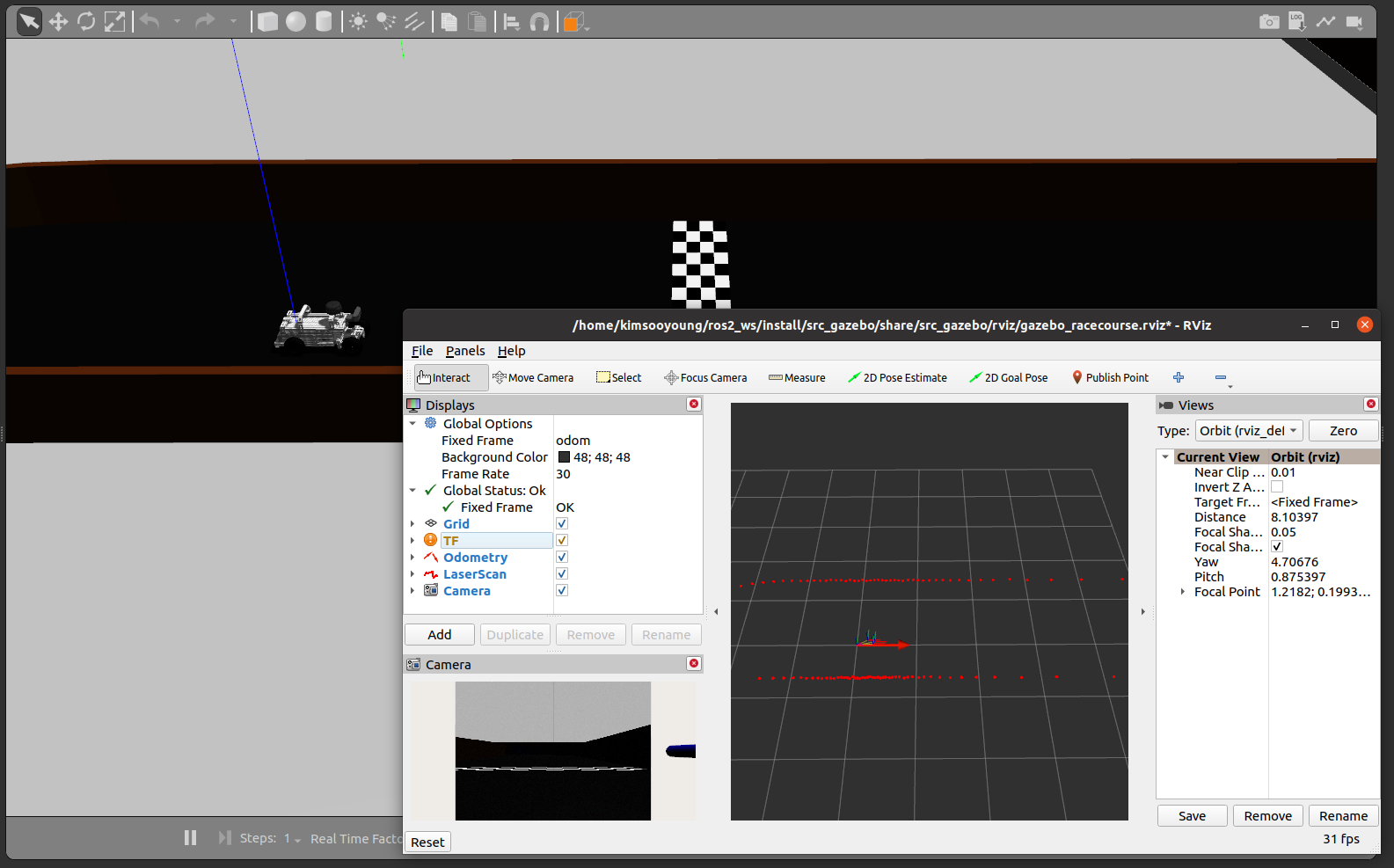
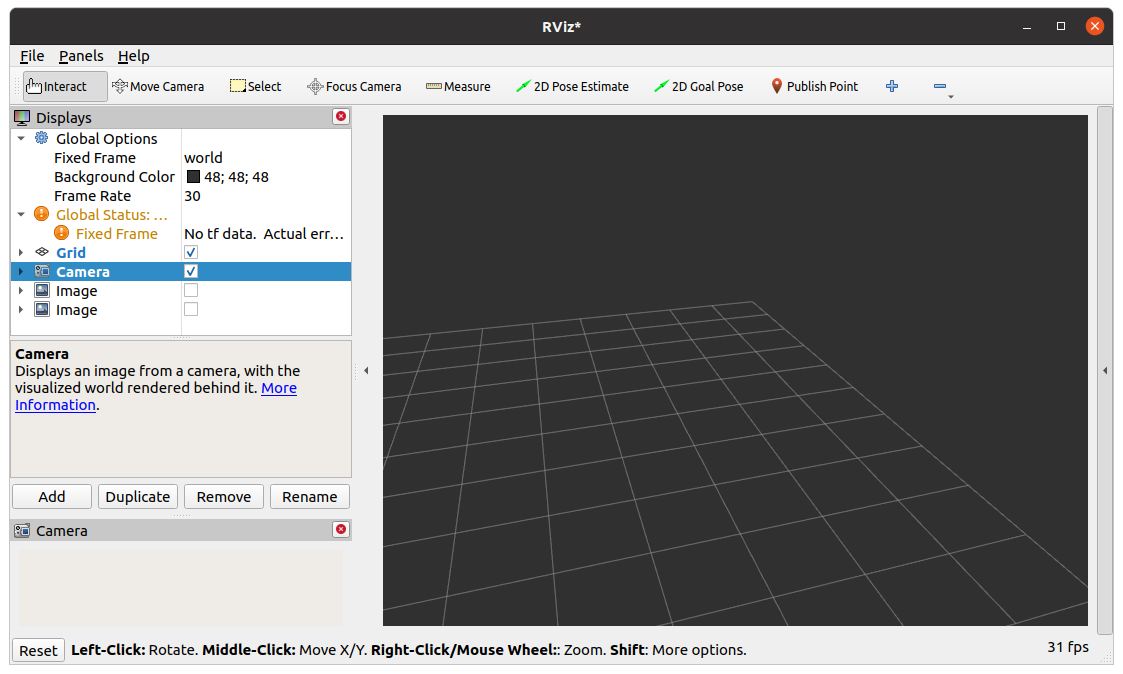
⇒ 현재는 제가 미리 준비해둔 rviz2 화면이 등장했지만, 실습을 통해 이런 rviz2 화면을 구성하고 launch file을 통해 실행하는 법까지 다루어 보겠습니다.
- Rviz2의 개별 실행은 터미널에서 가능합니다.
rviz2
- rviz에서 view를 전환하는 방식은 gazebo와는 다르게 마우스 휠 클릭이 평행이동, 왼쪽 클릭이 회전이동입니다. 더불어, 우측 상단의 view를 통해 시점을 바꿀 수도 있습니다.
⇒ Orbit이 기본이며, 종종 TopDownOrtho도 사용됩니다.
- 좌측 Displays 패널을 통해 각종 Topic, TF 데이터들을 추가, 수정, 옵션 변경할 수 있습니다.
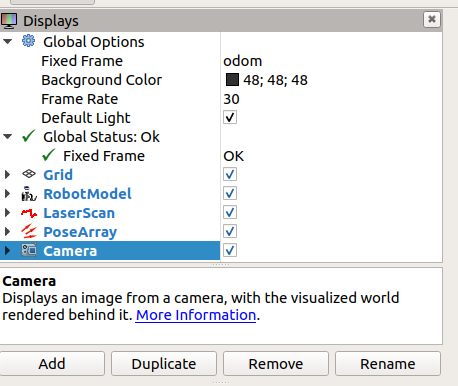
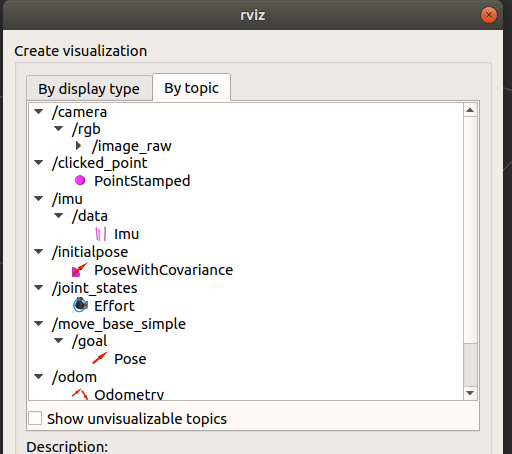
- 새로운 display를 추가하기 위해서, 패널 하단 Add 버튼을 사용합니다.
rviz2에서는 By display type / By Topic의 두가지 add option을 제공합니다.
-
Topic type을 사용하면 rviz2가 현재 실행되고 있는 topic을 인식하여 적합한 시각화를 해주게됩니다.
-
Display type은 원하는 시각화 타입을 먼저 선택하고, 해당 타입을 갖는 topic을 사용자가 매칭하는 방식입니다.
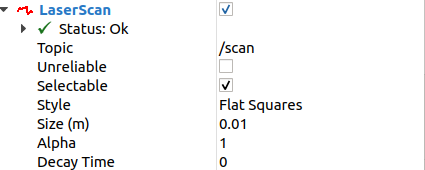
- 시각화 시, 색상/크기/투명도 등 다양한 옵션을 바꿀 수 있습니다.
- ros2 launch로 rviz2 실행하기
rviz2 또한 ros2 node입니다. 그렇기에 launch file에서의 실행은 일반 node와 동일합니다.
# Launch RViz
rviz = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
)
- 하지만, 이렇게 실행 시, 매번 시각화할 데이터를 선택하고, 옵션을 바꾸는 등의 수고스러움이 생깁니다. 따라서 rviz2는 설정을 저장하고 불러오는 기능을 제공합니다. (이는 rviz2 상단 패널에서도 확인 가능합니다.)
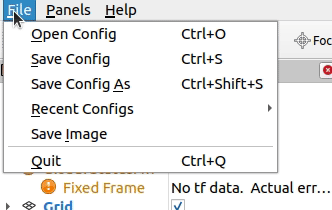
- save config를 통해 나만의 설정을 저장하고, launch file을 통해 실행하는 실습을 진행해봅시다.
- 여러분만의 rviz2 화면을 구성합니다.
- 해당 설정(config file)을 특정 패키지 내부에 저장하고, 위치를 기억합니다.
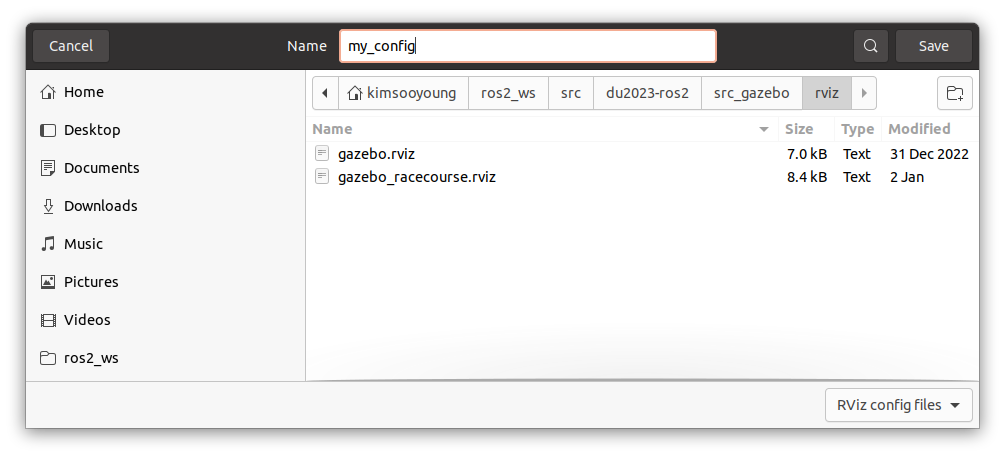
- 패키지 내 새로운 launch file을 작성하고 rviz2 node를 추가한 뒤, config file을 옵션으로 전달합니다.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
pkg_path = os.path.join(get_package_share_directory('src_gazebo'))
rviz_config_file = os.path.join(pkg_path, 'rviz', 'gazebo_racecourse.rviz')
# Launch RViz
rviz = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', rviz_config_file]
)
return LaunchDescription([
rviz
])
- 참고로, 새로운 폴더가 추가되었을 시 CMakeLists.txt에 해당 폴더를 추가하여야 이후 launch file에서 접근 가능합니다.
install(
DIRECTORY
launch
meshes
models
config
worlds
rviz
urdf
DESTINATION
share/${PROJECT_NAME}/
)
- 새로운 파일, 폴더가 추가되었으므로 colcon build를 수행한 뒤, 예제를 실행합니다.
# Package build again
cbp src_gazebo
source install/local_setup.bash
# execute your launch file
ros2 launch src_gazebo <your-launch-file>
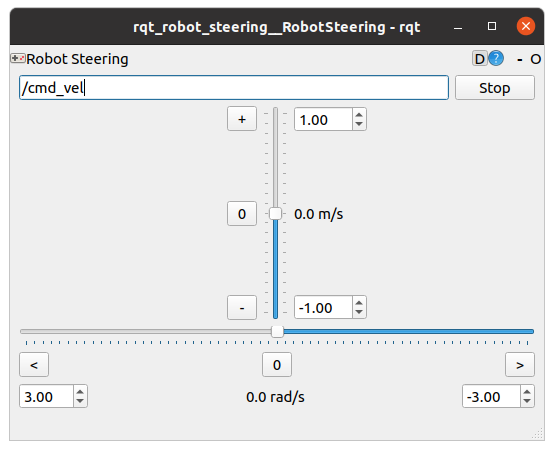
rqt_robot_steering
- rqt_robot_steering를 사용하면 움직이는 로봇을 조종하기 위해 별도의 코딩을 하지 않고도 GUI를 통한 조종이 가능합니다.
# package install
sudo apt install ros-foxy-rqt-robot-steering
# run node
rqt_robot_steering
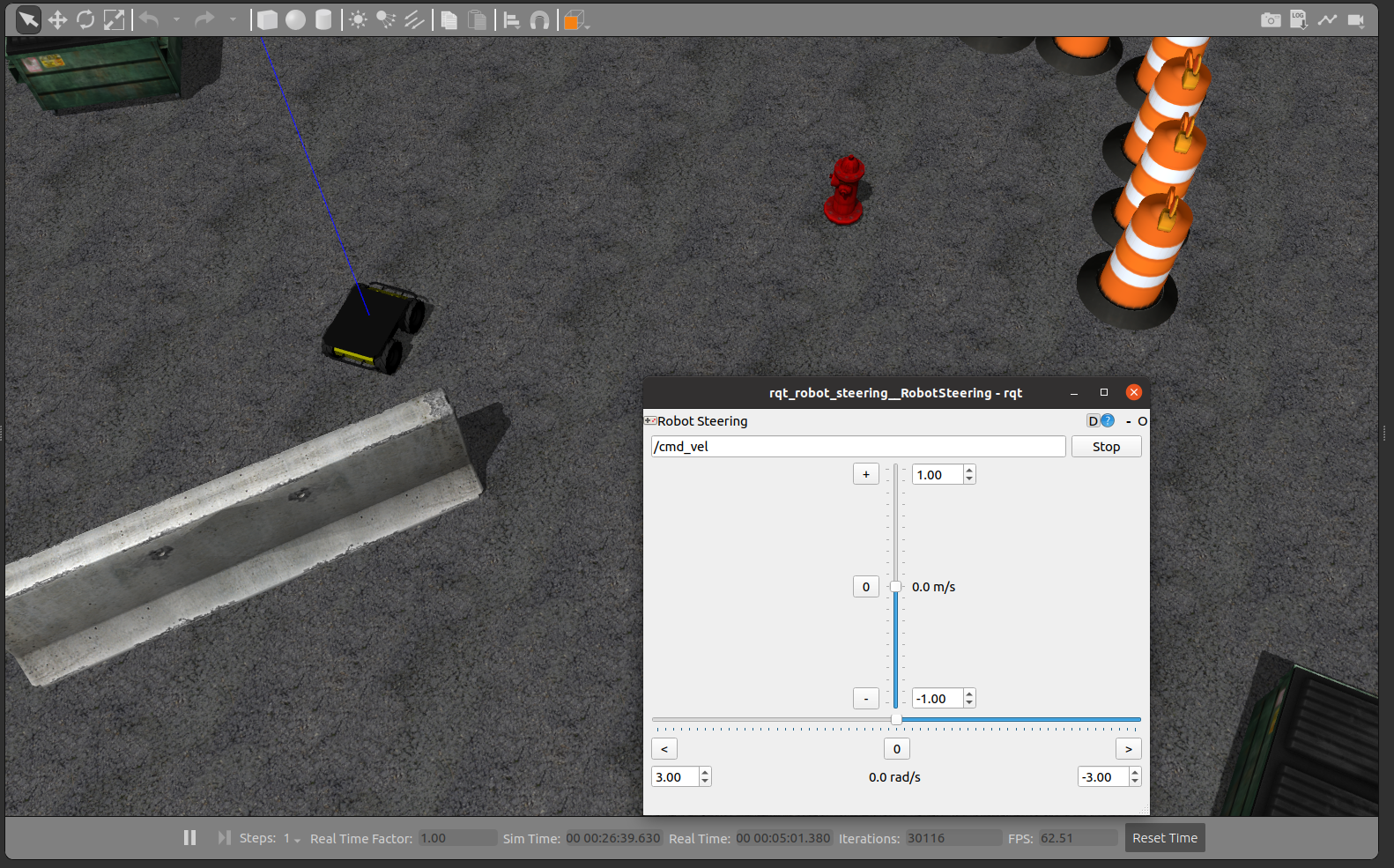
- GUI의 가로 슬라이드는 angular velocity, 세로 슬라이드는 linear velocity를 뜻하며 로봇의 topic이름을 맞춰준 뒤 원하는 조종이 가능합니다.
- 실습을 위해 이전 husky 예시를 실행하고 rqt_robot_steering를 통해 로봇을 조종해보겠습니다.
# Terminal 1
ros2 launch husky_gazebo husky_playpen.launch.py
# Terminal 2
rqt_robot_steering
rosbag2
rosbag은 프로그램 동작 중 발생하는 message 데이터를 기록하고 복기할 수 있게 해주는 툴입니다. 로봇 알고리즘을 개발할 때, 같은 상황에 대해 성능을 비교하는 경우, 혹은 교육 목적으로 데이터셋을 제공하는 경우 등에 매우 유용하게 사용할 수 있습니다.
- rosbag 사용법을 함께 실습해보겠습니다! 실습을 위해 gazebo 예시를 빌드하고 실행합니다.
# Example package clone
cd ~/ros2_ws/src
git clone https://github.com/RB2023ROS/gz_ros2_examples
cd ~/ros2_ws
# Example package build
cbp lidar_world
# Run Example package
ros2 launch lidar_world lidar_world.launch.py
해당 예시는 GPU Sensor를 사용하므로 일반 랩탑에서 실행 시 오류가 발생할 수 있습니다. 랩탑에서의 실행을 원하신다면 lidar_world/urdf/sensor_stick.urdf.xacro 파일에서 CPU 버전으로 토글합니다.
<?xml version="1.0"?>
<robot name="sensor_stick" xmlns:xacro="http://www.ros.org/wiki/xacro">
...
<!--Import gazebo elements-->
<!-- <xacro:include filename="$(find lidar_world)/urdf/sensor_stick.gazebo.xacro" /> -->
<!-- <xacro:include filename="$(find lidar_world)/urdf/sensor_stick_gpu.gazebo.xacro" /> -->
이런 여러 기능을 가진 시뮬레이션은 매우 느리게 동작하기 때문에 정확한 알고리즘의 검증이 불가능합니다.
- ROS 개발자들은 이러한 이유로 rosbag2를 통해 환경에서의 데이터셋을 제작합니다. 실제로 컴퓨터 비전 학회나 로봇 학회에서도 본인의 테스트베드를 rosbag으로 저장한 뒤 publish하는 경우가 많습니다.
- 그럼 실습을 통해 rosbag2의 사용 방법을 알아봅시다.
# Terminal 1 - gazebo env
ros2 launch lidar_world lidar_world.launch.py
# Terminal 2 - rosbag2 install & run
sudo apt-get install ros-foxy-ros2bag ros-foxy-rosbag2*
# create seperate dir for rosbag2
mkdir ~/ros2_ws/rosbag2
cd ~/ros2_ws/rosbag2
ros2 bag record -a -o lidar_world
...
[INFO] [1681816765.163369771] [rosbag2_transport]: Listening for topics...
[INFO] [1681816765.164494950] [rosbag2_transport]: Subscribed to topic '/tf_static'
[INFO] [1681816765.165085302] [rosbag2_transport]: Subscribed to topic '/clicked_point'
[INFO] [1681816765.165696583] [rosbag2_transport]: Subscribed to topic '/tf'
[INFO] [1681816765.166304849] [rosbag2_transport]: Subscribed to topic '/goal_pose'
⇒ record의 종료는 ctrl + c를 사용합니다.
- info 옵션을 통해 저장을 마친 rosbag2의 정보를 조회할 수 있습니다. 16초 동안 약 570MB의 데이터가 저장된 것을 알 수 있습니다.
$ ros2 bag info lidar_world/lidar_world_0.db3
[INFO] [1681817128.588731891] [rosbag2_storage]: Opened database 'lidar_world/lidar_world_0.db3' for READ_ONLY.
Files: lidar_world/lidar_world_0.db3
Bag size: 569.4 MiB
Storage id: sqlite3
Duration: 16.325s
Start: Apr 18 2023 20:19:25.172 (1681816765.172)
End: Apr 18 2023 20:19:41.497 (1681816781.497)
Messages: 1068
Topic information: Topic: /clock | Type: rosgraph_msgs/msg/Clock | Count: 173 | Serialization Format: cdr
Topic: /performance_metrics | Type: gazebo_msgs/msg/PerformanceMetrics | Count: 82 | Serialization Format: cdr
...
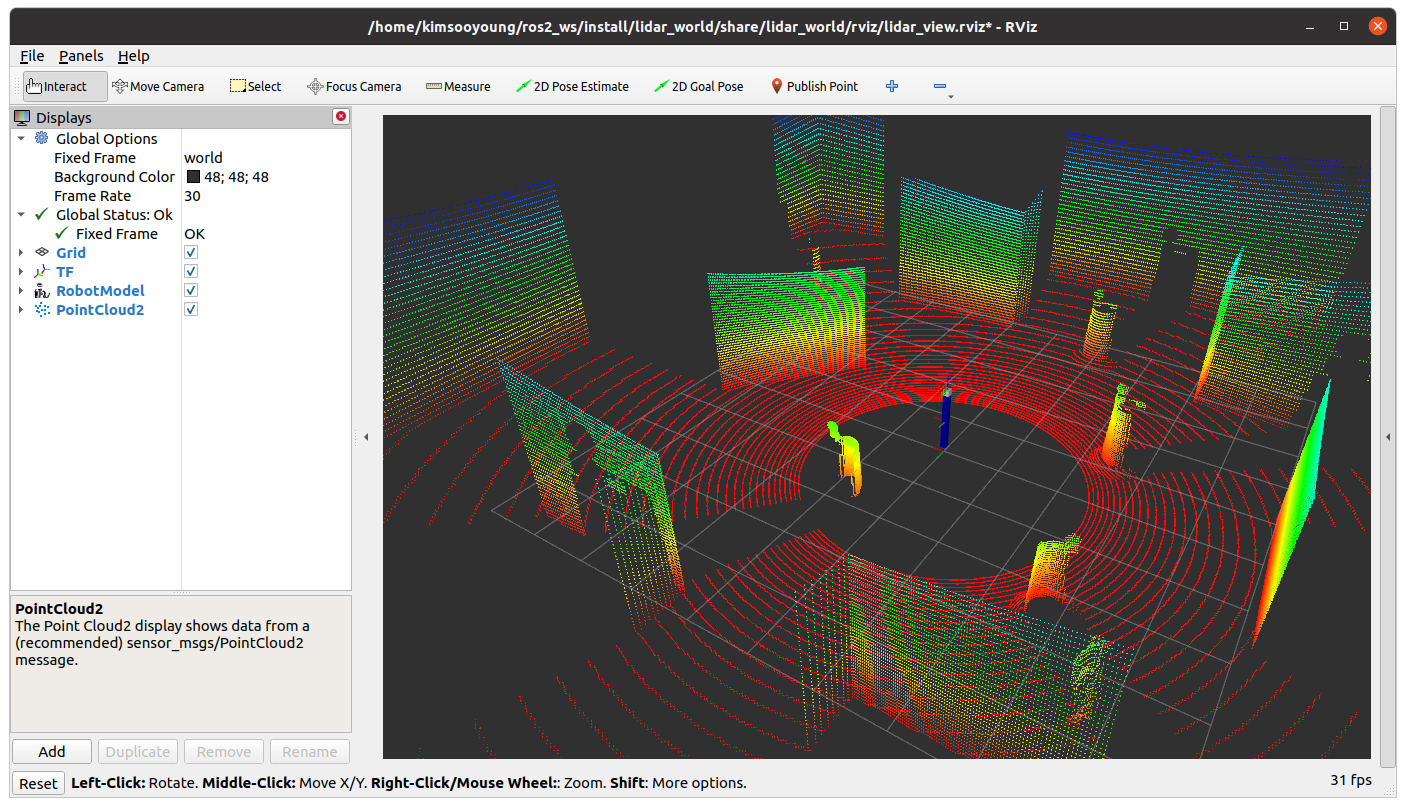
- 저장 완료된 rosbag2를 다시 복기해보고 rviz2를 통해 시각화까지 해봅시다.
# Terminal 1 - ros2 bag play
$ ros2 bag play lidar_world/lidar_world_0.db3
[INFO] [1681817182.011798950] [rosbag2_storage]: Opened database 'lidar_world/lidar_world_0.db3' for READ_ONLY.
...
# Terminal 2 - rviz2
$ rviz2
⇒ Fixed Frame을 link_1으로 변경해야 포인트들을 확인 가능합니다.
한차례 실습을 진행해 보았는데요, 이제 각각의 커멘드 라인 옵션들을 살펴보겠습니다.
- ros2 bag 키워드
| Command | Description |
|---|---|
| record | topic data를 저장합니다. |
| info | 저장된 rosbag 데이터의 정보를 조회합니다. |
| play | 저장된 rosbag 데이터를 재생합니다. |
- ros2 bag record 옵션
| Command | Description |
|---|---|
| -a | 모든 topic data를 저장합니다. |
| -o | 저장될 rosbag의 이름을 지정합니다. |
| -b | rosbag 저장 시, 최대 사이즈를 지정하며 사이즈 초과 시 새로운 rosbag으로 저장됩니다. |
| -d | rosbag 저장 시, 최대 시간을 지정하며 사이즈 초과 시 새로운 rosbag으로 저장됩니다. |
더불어, convert 기능을 통해 rosbag2를 쪼개거나 합할 수 있습니다. 자세한 사용법은 링크로 남겨두겠습니다. https://github.com/ros2/rosbag2#converting-bags
실제 로봇 제품이 없더라도 기록된 rosbag2 데이터를 통해 알고리즘의 검증과 시연이 가능합니다. 이번 강의에서도 rosbag2 데이터를 적극 사용하고자 하니 잘 기억해주세요!