Lecture1 - Introduction to ROS
What is ROS?
ROS란, 로봇 소프트웨어 개발에 사용되는 일종의 프레임워크입니다.
프레임워크라는 말은, ROS 나름대로의 실행 시나리오를 갖고 있다는 뜻입니다.
사용자인 우리들은, 이 시나리오를 사용하여 로봇을 다루는 우리만의 Application을 만들게 됩니다.

- image from : wikimedia
{kind=link}
그런데 왜 OS라는 이름이 붙게 되었을까요?
로봇을 실행하기 위해서, 수많은 프로그램들이 실행되며, ROS는 이들 사이의 우선순위와, 프로그램 사이의 데이터 흐름을 책임집니다. 이 작업은 스케쥴링이라고 불리며, 이러한 동작을 수행하는 시스템을 Operating System이라고 부르기 때문에 ROS라는 이름을 갖게 되었습니다.
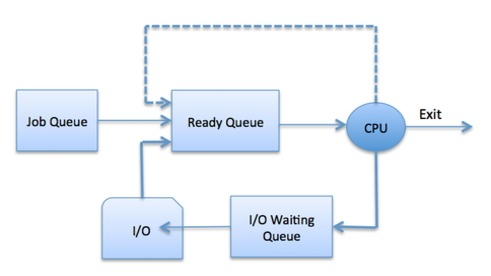
- image from : tutorialspoint
로봇을 개발하기 위해서 어떠한 프로그램들이 필요할까요?
로봇이 수행하는 임무들을 크게 3가지로 분류하면 인지, 판단, 제어의 3가지로 나뉩니다.
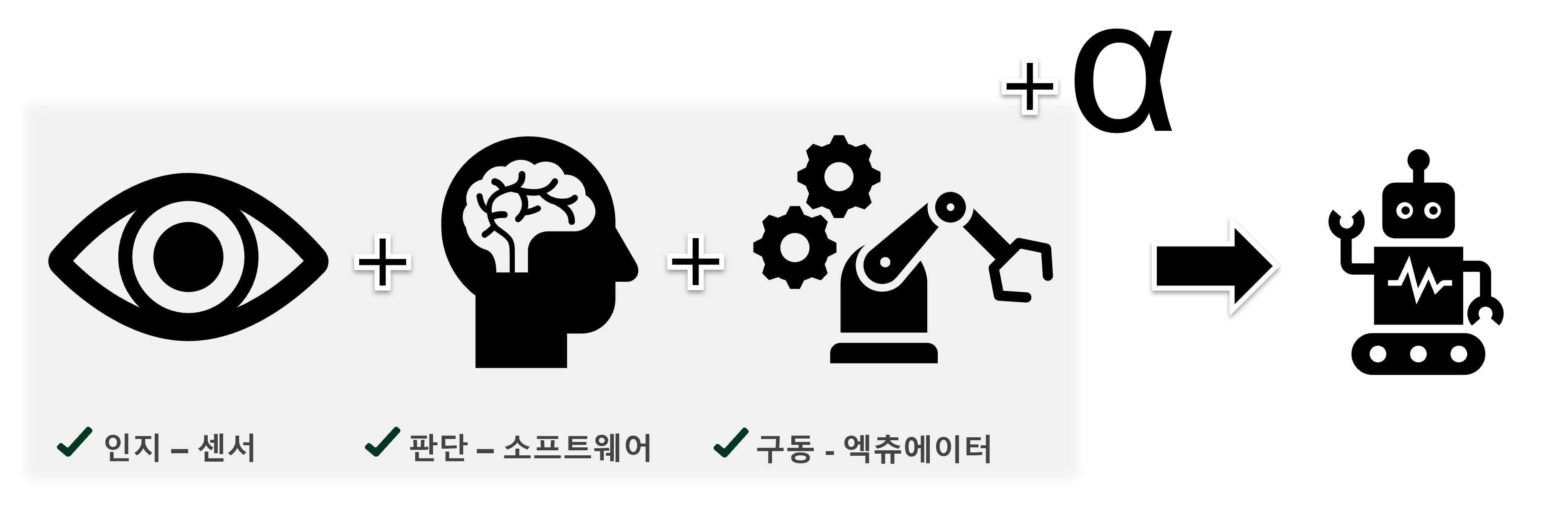
- 인지란, 센서들을 통한 물체 인지, 자기 자신의 위치와 방향 인지, 상황 인지 등 로봇에게 있어 환경과 상호작용하는 과정에 해당합니다.
- 판단이란, 앞/뒤로 움직일지, 로봇 팔을 뻗을지와 같이 인지를 기반으로 얻은 데이터를 통해 결정을 내리는 작업들이 해당할 것입니다.
- 제어는 로봇에서 빼놓을 수 없는 영역으로, 로봇은 실제 세상에서 움직이기 때문에, 얼마나 움직일지, 어느정도의 속도로 힘은 얼마나 강하게 줄지 등 물리적인 임무를 포함합니다.
이렇게 로봇 시스템은 무척 복잡하며, 이뿐만 아니라 회로, 설계, 재료, 에너지 등을 고려해야 하는 완성품 로봇은 현대 공학의 집합 그 자체라고 말할 수 있습니다.
About this lecture
이 강의에서 다루고자 하는 부분을 정확히하자면, 인지도 판단도 제어도 아닌, 시스템입니다.
로봇의 센서, 구동부, 알고리즘이 모두 준비되어 있는 상황에서, 이들을 하나의 시스템으로 엮어주는 역할을 하는 것이 바로 ROS입니다.
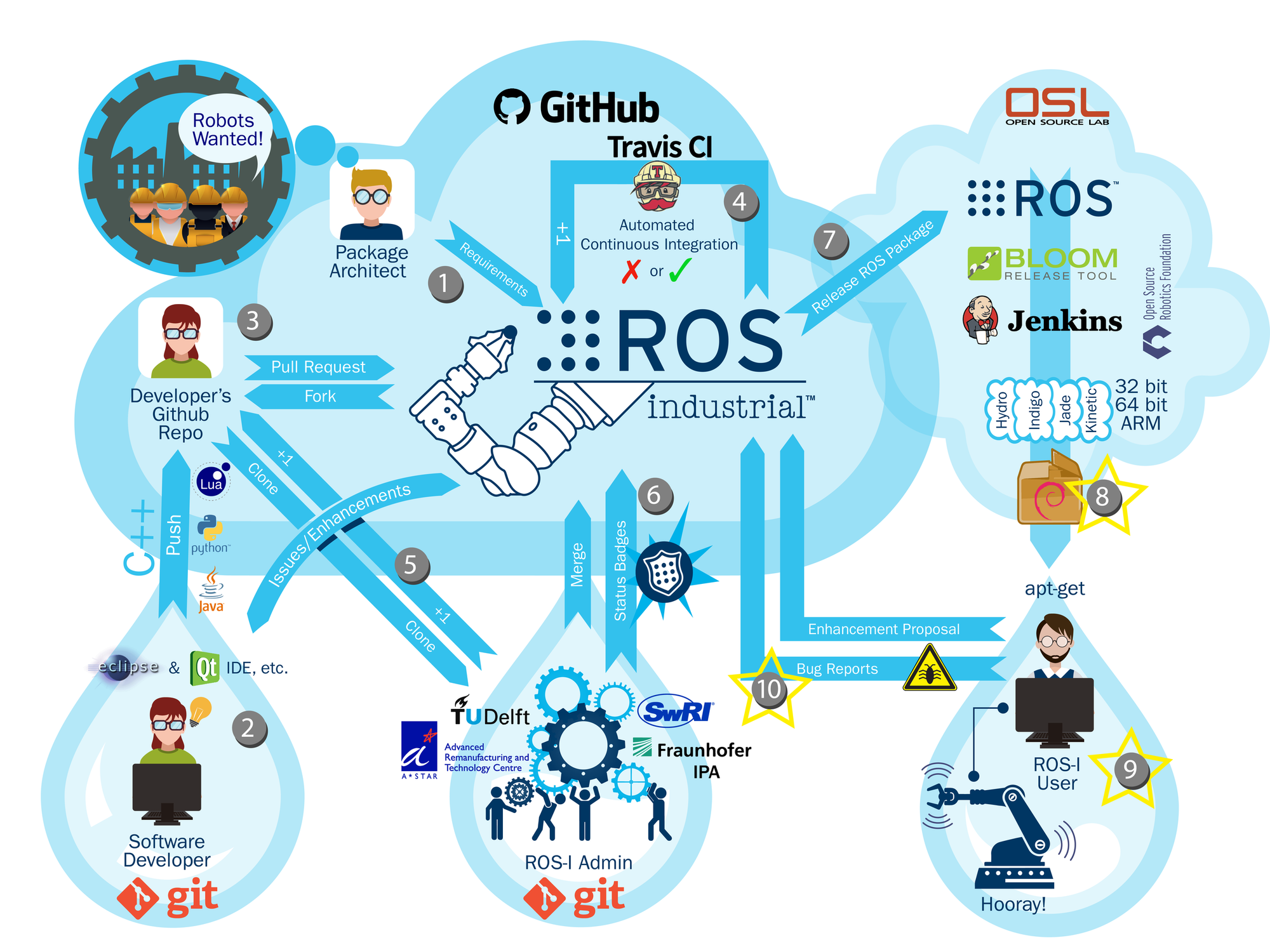
- image from : ROS Industrial
ROS라는 시스템의 특성상 정해진 코드와 방법으로 소프트웨어를 개발해야 하며, 대부분 ROS를 다루는 강의라고 하면 이를 지칭합니다. 우리가 배우고자 하는 주된 내용도 바로 이 부분이라고 말할 수 있습니다.
- ROS 개념
- ROS 커멘드 다루기
- ROS 프로그래밍 - Topic, Service, Action
- etc…
하지만, 여기서 그치지 않고, 저는 좀 더 실질적인 로봇 개발을 이야기하고자 합니다.
- 리눅스 시스템
- Docker 사용하기
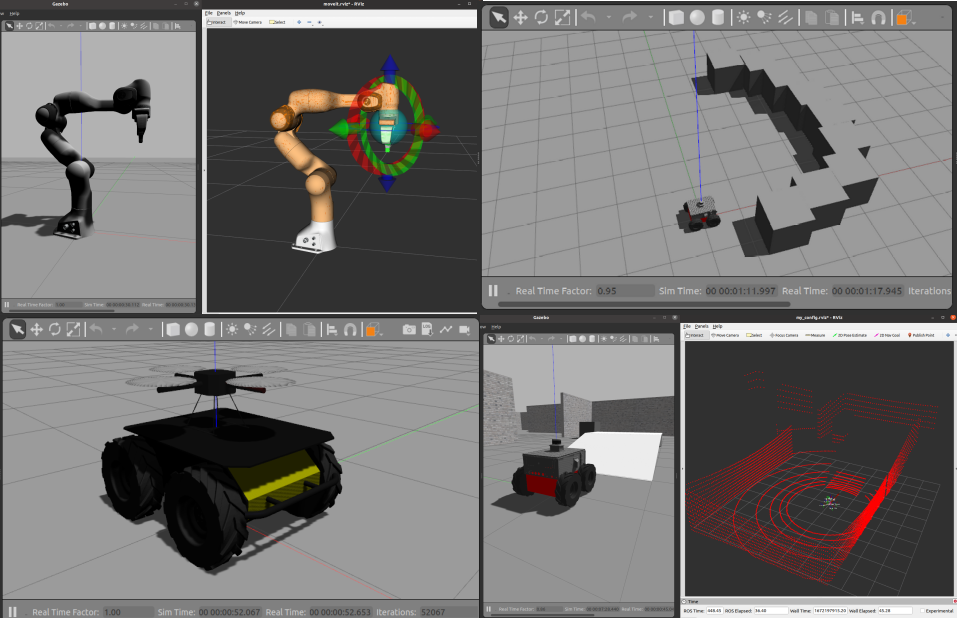
- 로봇 시뮬레이션
- 라이브 코딩과 에러 디버깅
학교를 다니다 보면 아무리 많은 이론을 공부하고 머릿속에 집어넣어도, 시험을 치고 나면 모두 사라지곤 합니다. 머리 속에 남는 공부를 위해서는 직접 코딩을 해보고, 프로젝트를 진행해봐야 합니다.
강의를 수강하기 위해 필요한 선수지식
- 본 강의는 최대한 많은 분들이 끝까지 이해할 수 있도록 설계되었습니다.
- 따라서, 최대한 쉽고, 프로그래밍 실력이 출중하지 않아도 모두 완강할 수 있게 진행합니다.
- 하지만 그럼에도, 아래 코드를 이해할 수 있을 정도의 배경지식은 필요합니다.
class OOPNode:
def __init__(self):
self.counter_ = 0
def hello_du(self, event=None):
hello_du = f"hello du {rospy.get_time()}, counter: {self.counter_}"
print(hello_du)
self.counter_ += 1
def my_first_oop_node():
oop_node = OOPNode()
if __name__ == '__main__':
try:
my_first_oop_node()
except Exception as e:
print(e)
- 파이썬 클래스, 메소드와 인스턴스
- for, while, if/else 등 기본 문법
강의 코드와 강의 노트 사용법
강의 도중 사용되는 코드들은 Github Repository를 통해 배포되어 있습니다. 코드 강의 중 지속해서 링크를 해드리며, 강의 시작 전 미리 살펴보시면 더욱 좋습니다.
강의 노트의 주소는 https://rb2023ros.github.io/kr/ 입니다. 코드와 명령어 등 필요한 리소스를 모두 담고 있으므로 복사/붙여넣기를 활용하여 강의 청취 시간을 절약하시기 바랍니다.
참고로 해당 노트는 hugo를 사용하여 제작된 웹 페이지임을 밝힙니다.