Lecture10 - TF2 Examples, Outro
tf2 사례
제가 강조해서 자꾸 좌표계가 tf가 중요하다고 말하고 있는데, 그 이유를 예시와 함께 좀 더 자세히 살펴보고자 합니다.
- husky slam
# 예시 종속성 설치
sudo apt install ros-noetic-slam-gmapping
# Terminal 1
roslaunch smb_gazebo smb_gazebo.launch world:=big_map_summer_school
# Terminal 2
roslaunch py_tf2_tutorial slam_gmapping.launch
# Terminal 3
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
# [option] rviz (이전 예시에서 rviz를 추가하였다면 넘어가셔도 좋습니다.)
rviz
- rviz를 다음과 같이 세팅합니다.
- 이제 teleop을 통해 로봇을 이동시키면서, rviz 화면의 변화를 확인해봅시다.
로봇이 움직이면서 자신의 위치를 파악함과 동시에 지도를 생성하는 예시입니다.
- 마지막으로, rqt를 실행하여 tf tree를 실행시킵니다.
- tf tree는 tf 관련 상태를 시각화하여 한번에 볼 수 있게 해주는 고마운 툴입니다.
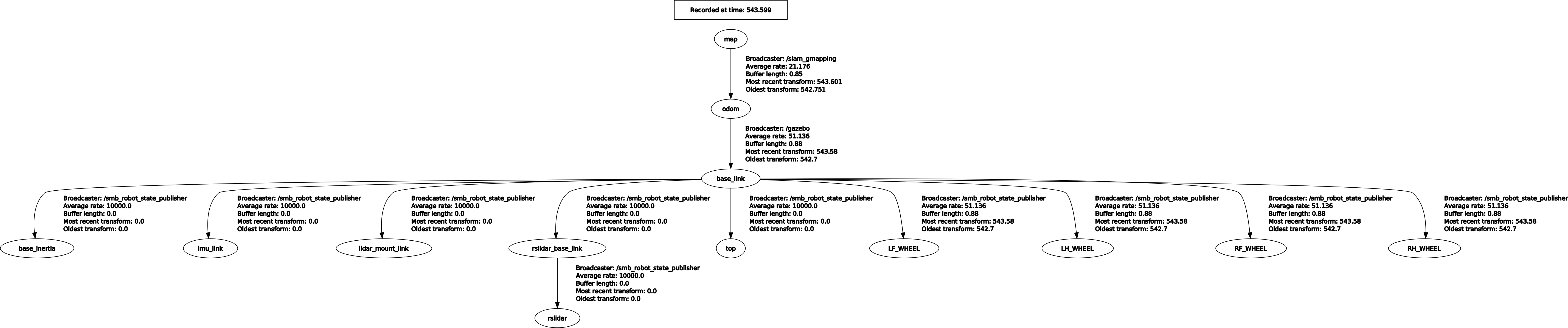
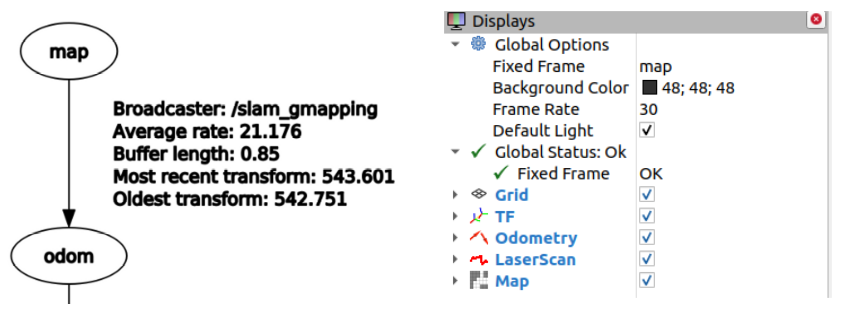
tree를 확대해서 살펴보자면,
- slam_gmapping은 map → odom으로의 tf broadcast를 담당하고 있습니다.
- 더불어 map은 모든 tf의 최상단에 존재하고 있습니다.
- 이러한 이유로 rviz에서 fixed frame을 map으로 설정한 것입니다.
퀴즈: 만약 tf tree가 온전히 연결되어 있지 않다면 어떤 일이 발생할까요?
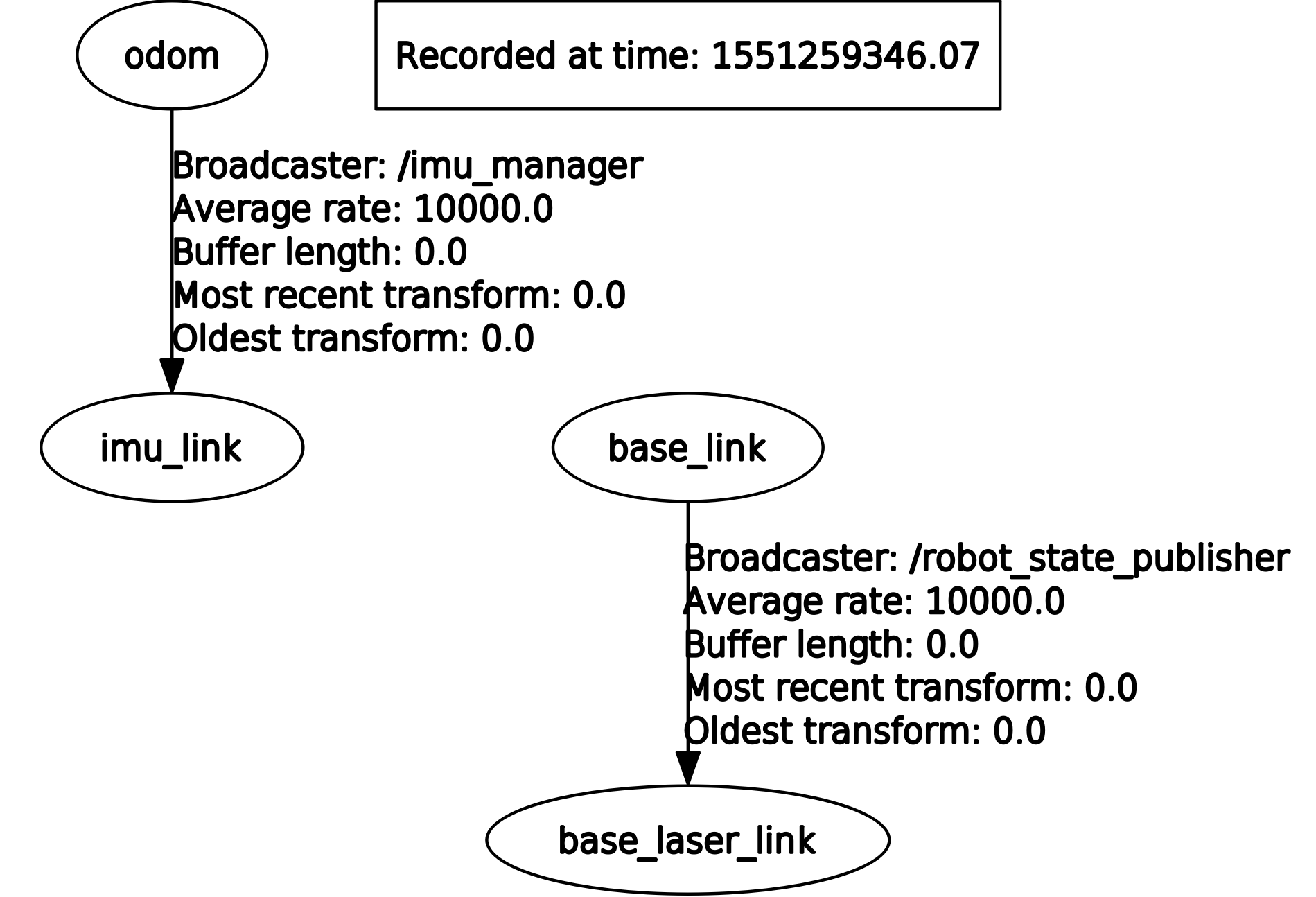
- image from : answers.ros.org
센서 입장에서도 tf는 매우 중요합니다.
같은 데이터라도 그 기준이 어딘지에 따라서 전혀 다른 의미를 가질 수 있기 때문입니다.
예를 들어, 라이다의 tf를 180도 반대로 설정해버리면 후방에 있는 장애물을 전방 장애물로 잘못 인식할 수 있습니다.
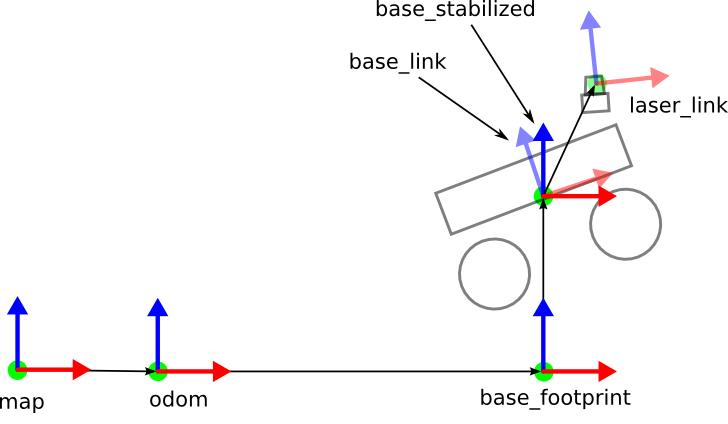
- image from : answers.ros.org
더불어, 로봇 팔과 같은 관절로봇에게도 tf는 무척 중요한 의미를 갖습니다. 각 joint의 상태를 통해 tf를 계산하고 이를 통해 최종적으로 로봇 팔의 끝점이 어디에 위치하는지 계산할 수 있습니다.
MoveIt! 실습해보기
이번 시간에는 조금 쉬어가는 느낌으로 유용한 ROS Package를 소개해드리고자 합니다.

- image from : moveit github
MoveIt은 다관절 로봇의 모션 제어를 위한 프레임워크입니다. 이름만 들어서는 감이 잘 오지 않지요? 간단한 예시를 통해 살펴봅시다.
- 우리 인간은 팔을 이용하여 물건을 잡는 것이 매우 쉽고 간단하지만, 사실 이는 기구학적으로, 동역학적으로, 에너지 차원에서 매우 최적화된 움직임입니다.
- 로봇 팔의 경우 장착된 모터의 방향각이 제한된 경우도 있고, 자기 자신과 얽혀버리는 문제도 발생할 수 있으며, 같은 목표를 갖더라고 다양한 경로로 움직일 수 있기 때문에 최적의 경로에 대한 기준도 고려해야 합니다.
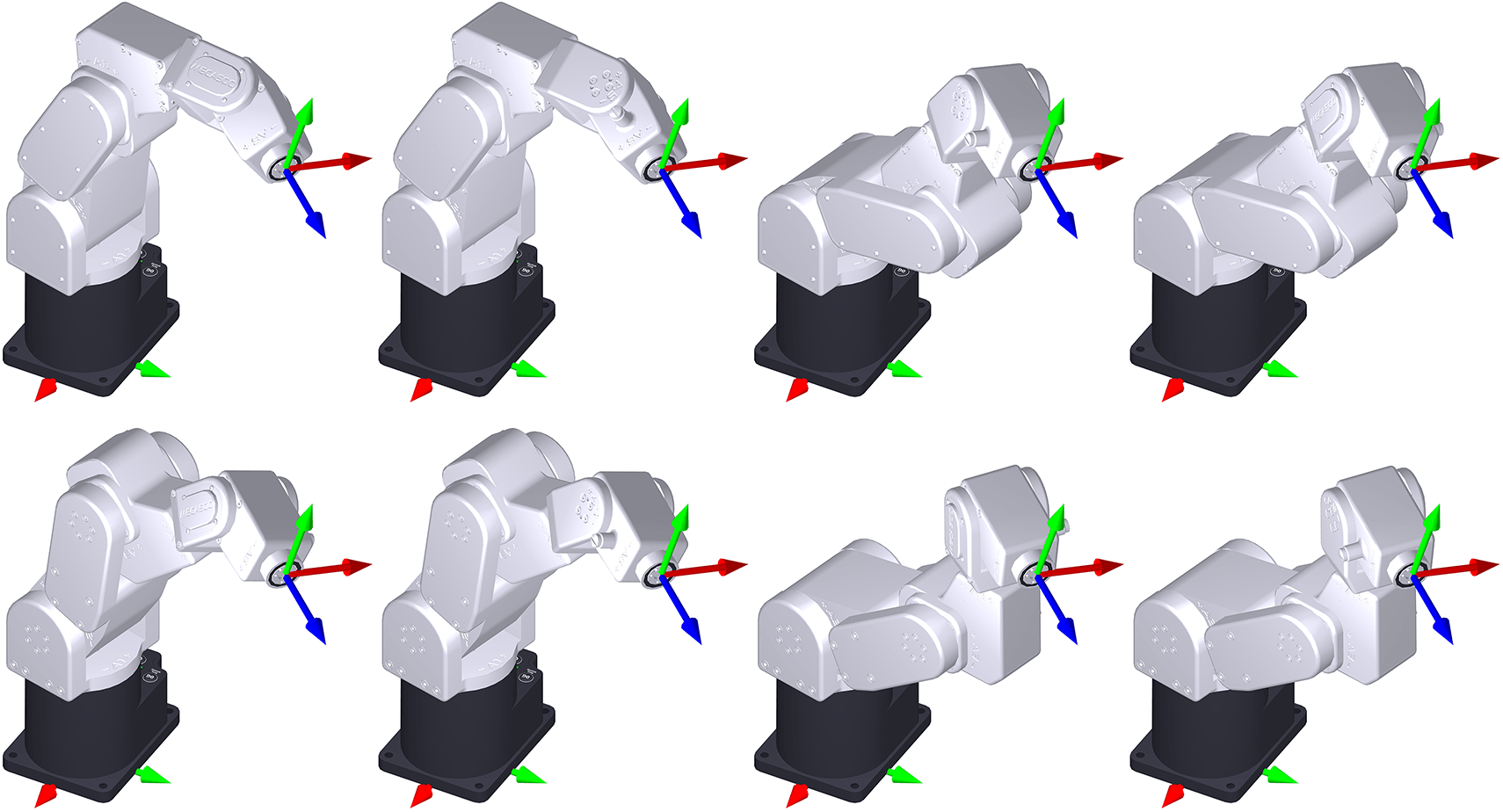
- image from : mecademic
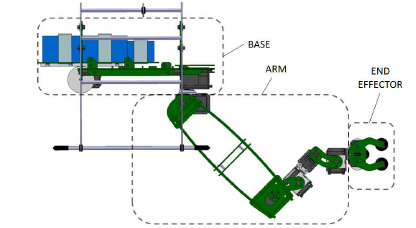
로봇 팔의 주요 구성
- Base : 고정된 지지부
- Arm : 실질적인 로봇 팔
- End Effector : Arm 끝에 부착되는 기구의 통칭, 일반적으로 물체를 잡고 놓는 동작을 수행
MoveIt은 관절 로봇의 기본 구성과 Mass Matrix, 각 모터의 제한과 원하는 움직임을 지정해주면 이에 따라 각 관절의 위치, 속도, 가속도 경로를 최적화(Planning) 해주는 프레임워크이며, 그 밖에도, 물체 인지, 장애물 회피, End Effector에 가해지는 힘까지 고려 가능한 거대한 오픈소스 프로젝트입니다.
MoveIt Motion Planning Framework
이번 예제로 저와 함께 MoveIt의 가장 기본적인 데모를 함께 실행해보겠습니다. 예시에 사용되는 로봇은 FRANKA EMIKA의 PANDA라는 로봇입니다. FRANKA EMIKA - PANDA
아래 커멘드 라인을 함께 따라와주세요.
- apt 패키지 설치
sudo apt install ros-noetic-moveit-setup-assistant
sudo apt install ros-noetic-moveit
sudo apt install ros-noetic-gazebo-ros-control joint-state-publisher
sudo apt install ros-noetic-controller-manager
sudo apt install ros-noetic-ros-controllers
sudo apt install ros-noetic-ros-control
sudo apt install ros-noetic-robot-state-publisher
- 예제 패키지 Clone
cd ~/catkin_ws
git clone https://github.com/ros-planning/moveit_tutorials.git -b master
git clone https://github.com/ros-planning/panda_moveit_config.git -b noetic-devel
- 관련 종속성 설치 - rosdep 추가 설명
cd ~/catkin_ws/src
rosdep install -y --from-paths . --ignore-src --rosdistro noetic
- 패키지 빌드
cd ~/catkin_ws
catkin build
source devel/setup.bash
- 데모 실행
roslaunch panda_moveit_config demo_gazebo.launch
여기까지 잘 따라오셨나요? 그렇다면 강의자의 설명에 따라 RViz Motion Planning Plugin을 사용해봅니다.
참고자료