Lecture2 - Dev Env Setup
Develpoment Environment Setup
프로젝트 기반의 강의인 만큼, 개발 환경이 구축되지 않으면 앞으로의 실습을 진행할 수 없습니다. 따라서 이번 파트에 많은 시간을 배정하였고, 힘들 수 있지만 끝까지 따라와주시면 감사합니다.
준비한 환경은 다음과 같습니다.
- Ubuntu Linux 설치와 ROS 설정
- wsl2를 기반으로 한 Windows 내 ROS 설정
- Docker 기반의 ROS 설정
1,2,3 순서로 추천하는 설정입니다. 1번을 진행하시다가 도저히 못하겠으면 2번으로, 그래도 안되면 3번으로 진행해 주시면 됩니다.
Ubuntu Linux 설치와 ROS 설정
Linux라고 함은 사실 OS 자체라기보다 OS의 기초가 되는 코어 소프트웨어에 가깝습니다. 이 코어를 사용하여 여러 버전의 OS가 개발되었으며 이를 Liunx 배포판 이라고 지칭합니다.
Ubuntu Linux는 리눅스 배포판 중 가장 널리 알려진 배포판으로, 영국의 Software회사인 Canonical과 우분투 재단에서 개발, 유지보수 및 배포를 하고 있습니다.

- image from : omdriod.com
기존의 Windows 노트북을 사용하고 있었다면 듀얼 부팅이라는 것을 통해 Ubuntu + Windows를 모두 사용 가능합니다. 듀얼 부팅에 방법에 대해선 잘 설명한 영상들이 많으므로 링크로 대체하겠습니다.
Ubuntu 20.04 설치를 확인 하셨다면 터미널을 실행한 뒤 아래의 명령어들을 실행합니다.
- terminator 설치
sudo apt update
sudo apt install terminator -y
terminator 화면 분할 예시
- ctrl + alt + t : 터미널 실행
- ctrl + shift + e : 세로 분할
- ctrl + shift + o : 가로 분할
- ctrl + shift + w : 창 닫기
- alt + 화살표 : 창 간 이동
ROS / ROS 2 한줄 설치
cd ~/
sh -c "$(curl -fsSL https://raw.githubusercontent.com/kimsooyoung/ros_menu/main/scripts/setup.sh)"
…
Do you want to install ROS automatically? (y/N): y
다음으로, 시뮬레이션 프로그램인 Gazebo를 설치합니다. Gazebo는 ROS를 관리하는 조직인 OSRF에서 공식 지원하는 로봇 시뮬레이터입니다.
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" /etc/apt/sources.list.d/gazebo-stable.list'
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt update
sudo apt install gazebo11 libgazebo11-dev -y
sudo apt install ros-foxy-gazebo-ros-pkgs -y
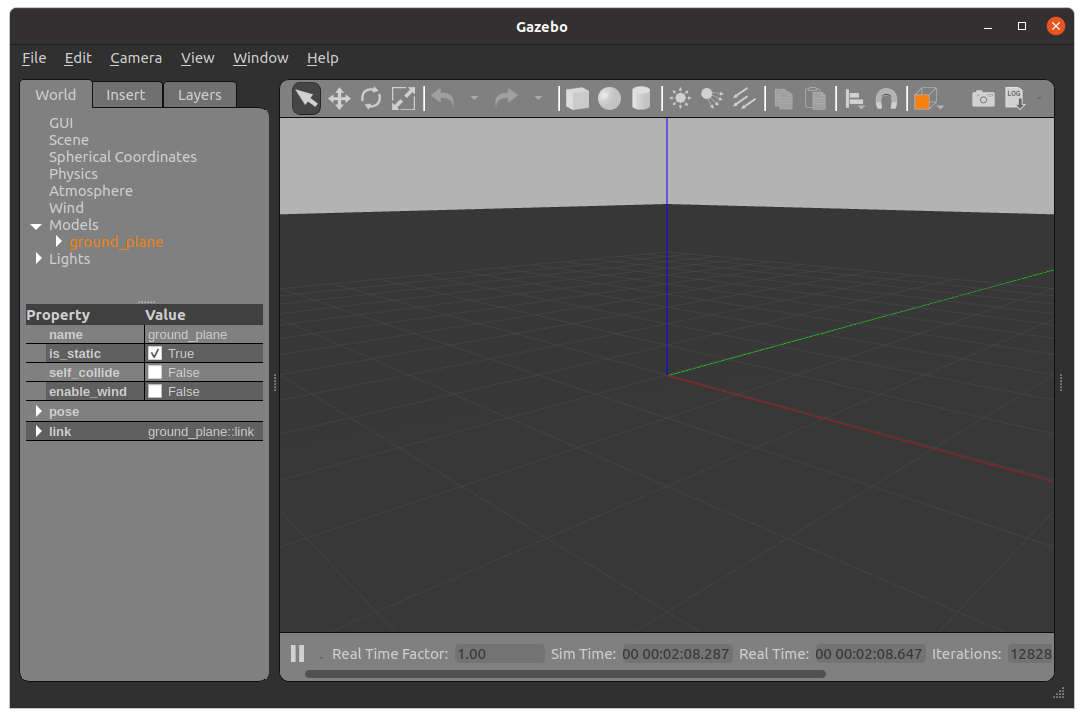
그림와 같이 Gazebo의 화면이 어둡고, 그림자가 보이지 않는다면 호환되는 그래픽 드라이버를 설치해야 합니다.
sudo ubuntu-drivers autoinstall
sudo reboot
# 장착된 장치 확인
ubuntu-drivers devices
마지막으로, catkin build system을 사용하기 위해 아래 커멘드 명령어를 실행합니다.
sudo apt update
sudo apt install python3-catkin-tools
Windows + WSL2 설정
WSL(Windows Subsystem for Linux) 이란, 리눅스용 윈도우 하위 시스템의 약자로, 윈도우 10에서 네이티브로 리눅스 실행 파일(ELF)을 실행하기 위한 호환성 계층입니다.
Windows10부터 WSL을 지원하며, Windows 2004(20H1) version부터 WLS2를 지원하고 있습니다.
- 최신 Windows 업데이트 적용 (“Windows Key ⇒ 업데이트"로 이동하여 최신 업데이트를 적용합니다.)
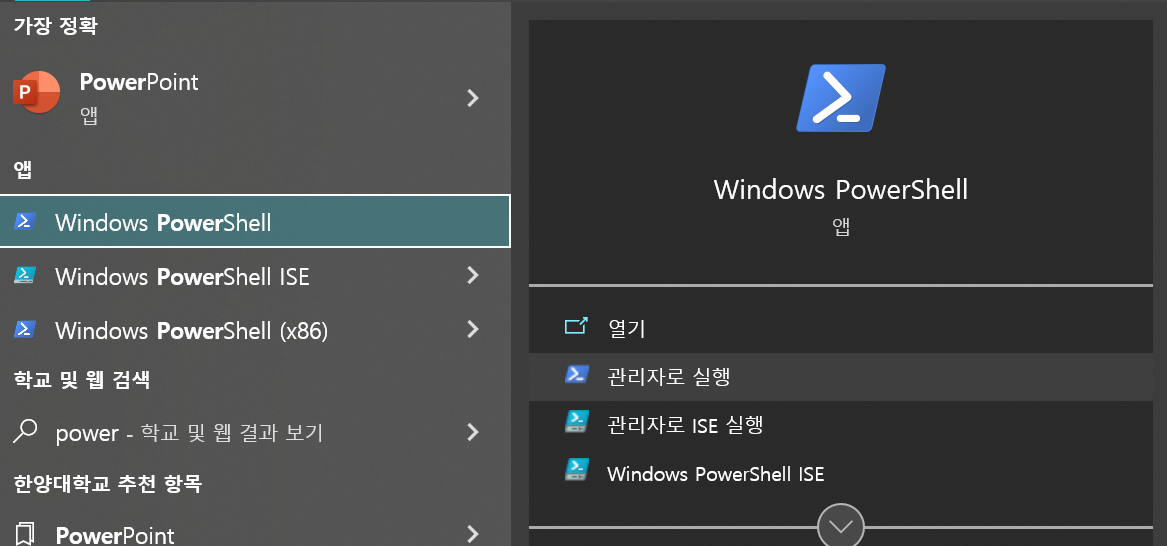
- powershell을 관리자 권한으로 실행한 뒤, 설치 되어있는 WSL 2를 활성화시킵니다.
> dism.exe /online /enable-feature /featurename:Microsoft-Windows-Subsystem-Linux /all /norestart
배포 이미지 서비스 및 관리 도구
버전: 10.0.19041.844
이미지 버전: 10.0.19043.1348
기능을 사용하도록 설정하는 중 [==========================100.0%==========================]
작업을 완료했습니다.
> dism.exe /online /enable-feature /featurename:VirtualMachinePlatform /all /norestart
배포 이미지 서비스 및 관리 도구
버전: 10.0.19041.844
이미지 버전: 10.0.19043.1348
기능을 사용하도록 설정하는 중 [==========================100.0%==========================]
작업을 완료했습니다.
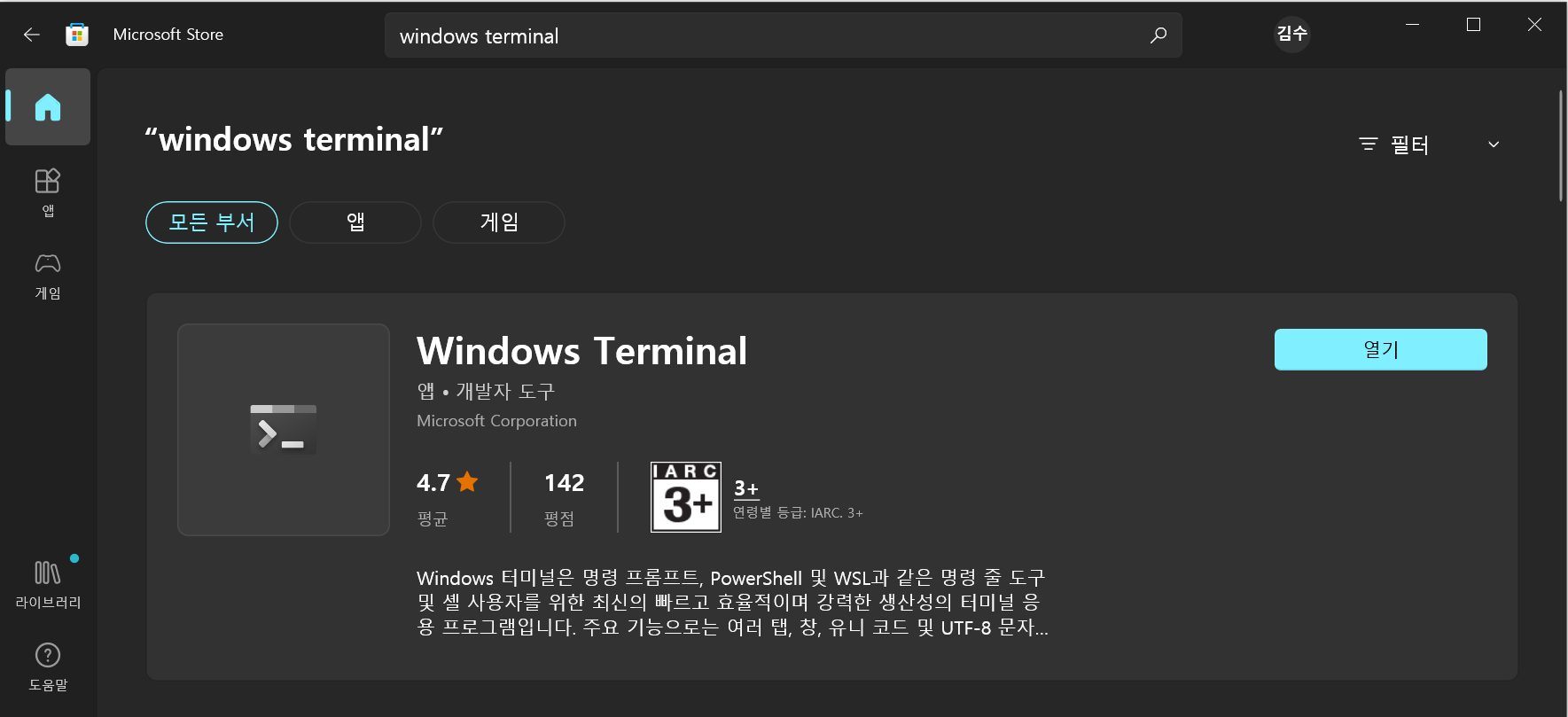
- MS Store로 이동하여 windows terminal을 설치합니다.
windows terminal 화면 분할 예시
- alt + shift + - : 가로 분할
- alt + shift + + : 세로 분할
- ctrl + shift + w : 창 닫기
- alt + 화살표 : 창 간 이동
다음 링크를 통해 프로그램을 다운받고 WSL 2 Linux 커널 업데이트를 설치/진행 후 재부팅합니다.
커널 업데이트를 마친 다음, powershell에 아래 커맨드 라인을 입력하여 WSL 2를 기본 사용하도록 설정합니다.
> wsl --set-default-version 2
WSL 2와의 주요 차이점에 대한 자세한 내용은 https://aka.ms/wsl2를 참조하세요
작업을 완료했습니다.
이 시점에서 발생할 수 있는 문제들을 한차례 살펴보고 가겠습니다.
-
wsl --set-default-version 2에서 작업 완료 메세지가 등장하지 않는 경우 ⇒ 제일 처음 명령어부터 제가 보여드린 예시와 동일한 결과를 얻었는지 확인해보세요 -
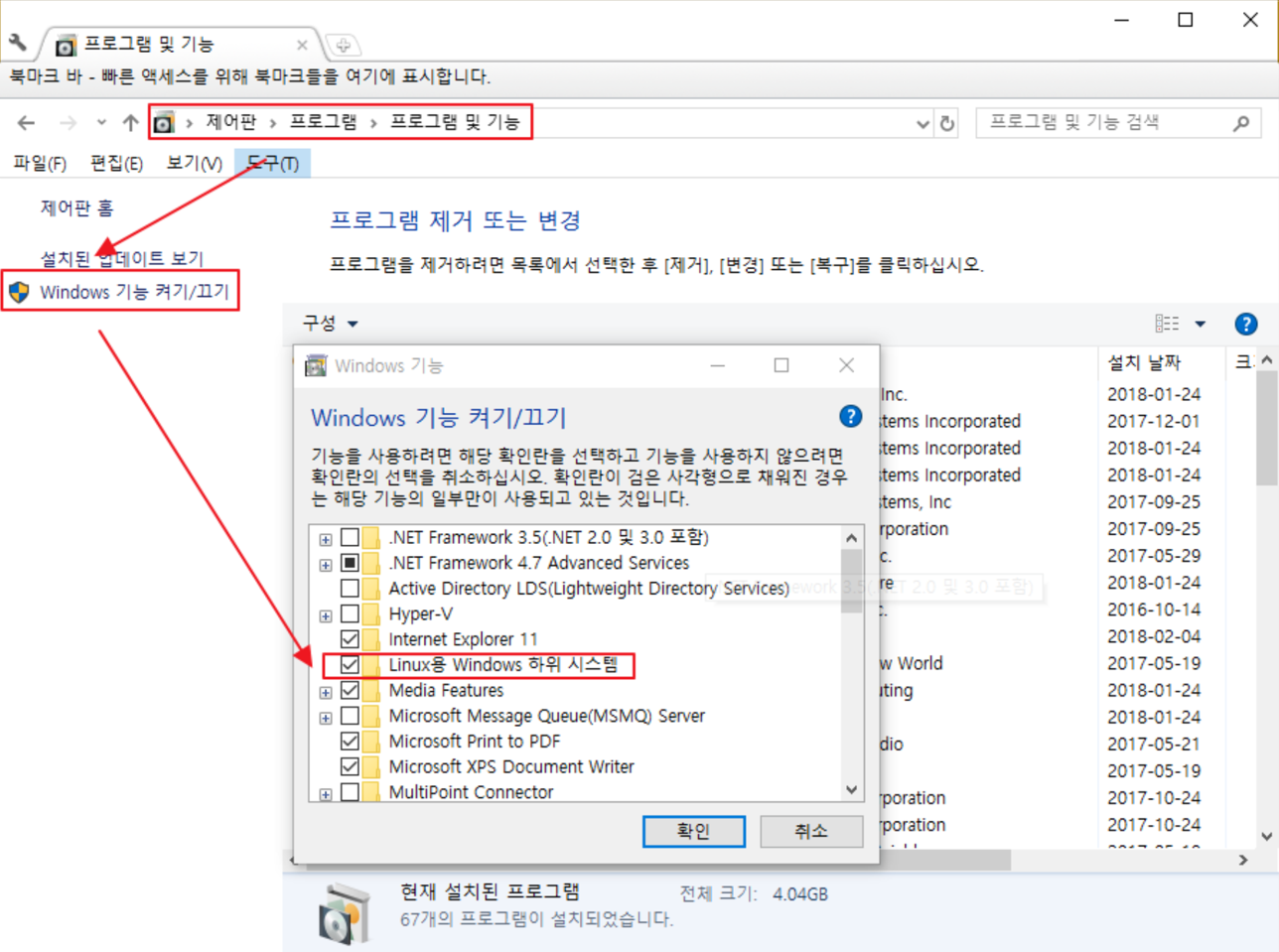
Linux용 Windows 하위 시스템 설정 여부도 확인합니다.
지금까지 진행한 작업들이 제대로 설정 되어있는지 확인해봅시다.
> wsl -l -v
NAME STATE VERSION
* Ubuntu-20.04 Running 2
- 문제가 없다면 MS Store 진입 후, Ubuntu 20.04 버전을 설치합니다.
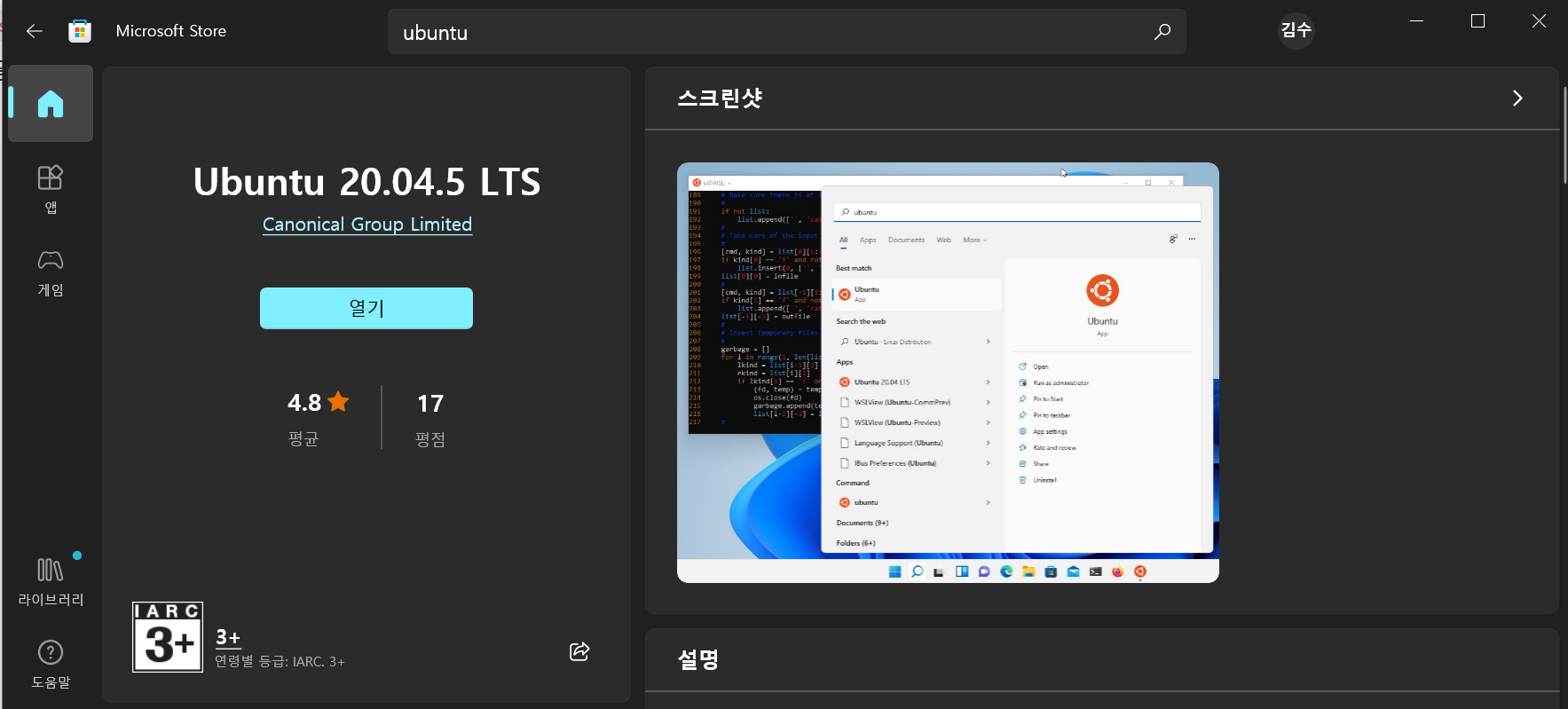
설치 이후, 열기 버튼을 눌러 초기 실행을 하고 username, password를 설정합니다.
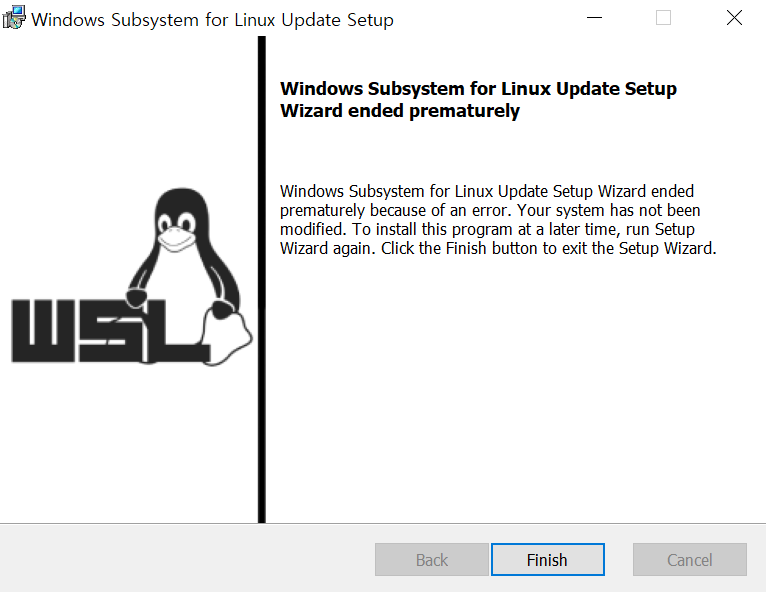
이 시점에서 발생할 수 있는 문제들도 다시 한차례 살펴보고 가겠습니다.
- ‘The WSL Optional Component is not Enabled. Please Enable it and Try again’ 오류가 발생하는 경우
> Enable-WindowsOptionalFeature -Online -FeatureName Microsoft-Windows-Subsystem-Linux
-
0x80370102 에러가 발생한 경우 ⇒ 부팅 BIOS에서 가상화 기능을 활성화해줍니다.
-
0xc03a001a 에러가 발생한 경우 ⇒ 다음 블로그 포스팅을 참고합니다.
설치 이후에는 windows terminal에서 Ubuntu Terminal을 선택하여 실행 및 진입이 가능합니다. 설정 탭을 통해 Ubuntu 20.04를 기본 터미널로 설정 후 저장합시다.

- ROS / ROS 2를 한줄 설치합니다.
$ cd ~/
$ sh -c "$(curl -fsSL https://raw.githubusercontent.com/kimsooyoung/ros_menu/main/scripts/setup.sh)"
Installing Neuron Startup Menu...
Cloning into '/home/kimsooyoung/ros_menu'...
remote: Enumerating objects: 583, done.
remote: Counting objects: 100% (290/290), done.
remote: Compressing objects: 100% (193/193), done.
remote: Total 583 (delta 179), reused 173 (delta 93), pack-reused 293
Receiving objects: 100% (583/583), 154.50 KiB | 3.22 MiB/s, done.
Resolving deltas: 100% (340/340), done.
Do you want to install ROS automatically? (y/N): y
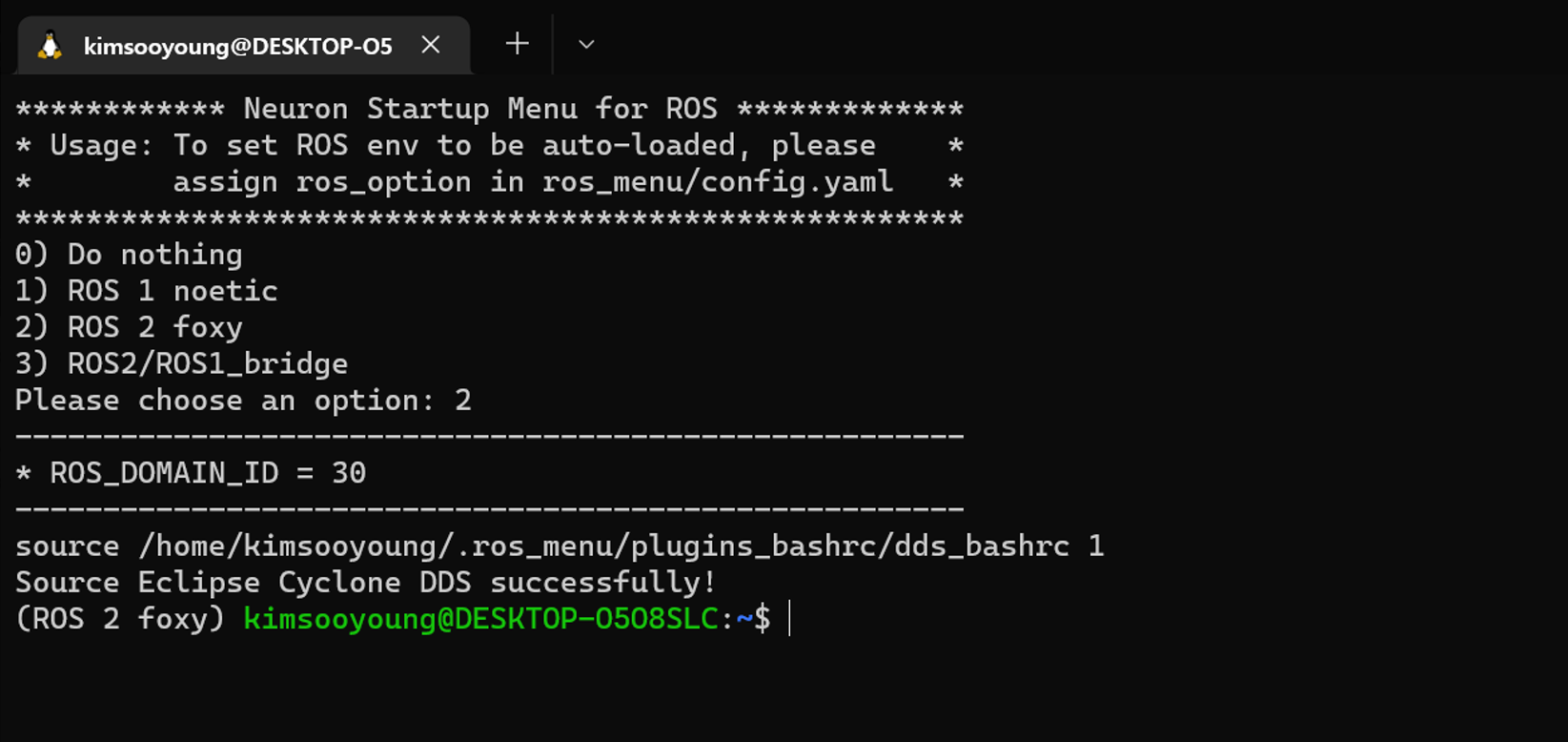
- 설치가 완료되었다면, 앞으로 터미널을 새로 등장시킬 때마다 다음과 같이 사용할 ROS 버전을 묻게 됩니다.
GUI 인터페이스 설정
- 링크를 통해 VcXsrv를 설치합니다. ⇒ https://sourceforge.net/projects/vcxsrv/
- 설치 이후, XLaunch를 실행하고, 사진과 같은 설정을 진행합니다.

앞으로 재부팅 시마다 이 설정을 반복해줘야 하며, 종종 Gazebo의 Memory Leak로 인해 화면이 종료되지 않는 경우가 있는데, 이런 경우 XLaunch를 강제 종료해주면 됩니다.
- 설정이 잘 되었는지 Gazebo를 실행해봅시다.
export GAZEBO_IP=127.0.0.1
export DISPLAY=$(cat /etc/resolv.conf | grep nameserver | awk '{print $2}'):0
export LIBGL_ALWAYS_INDIRECT=0
gazebo
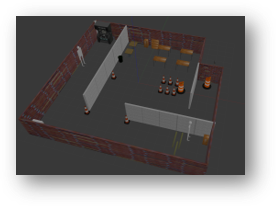
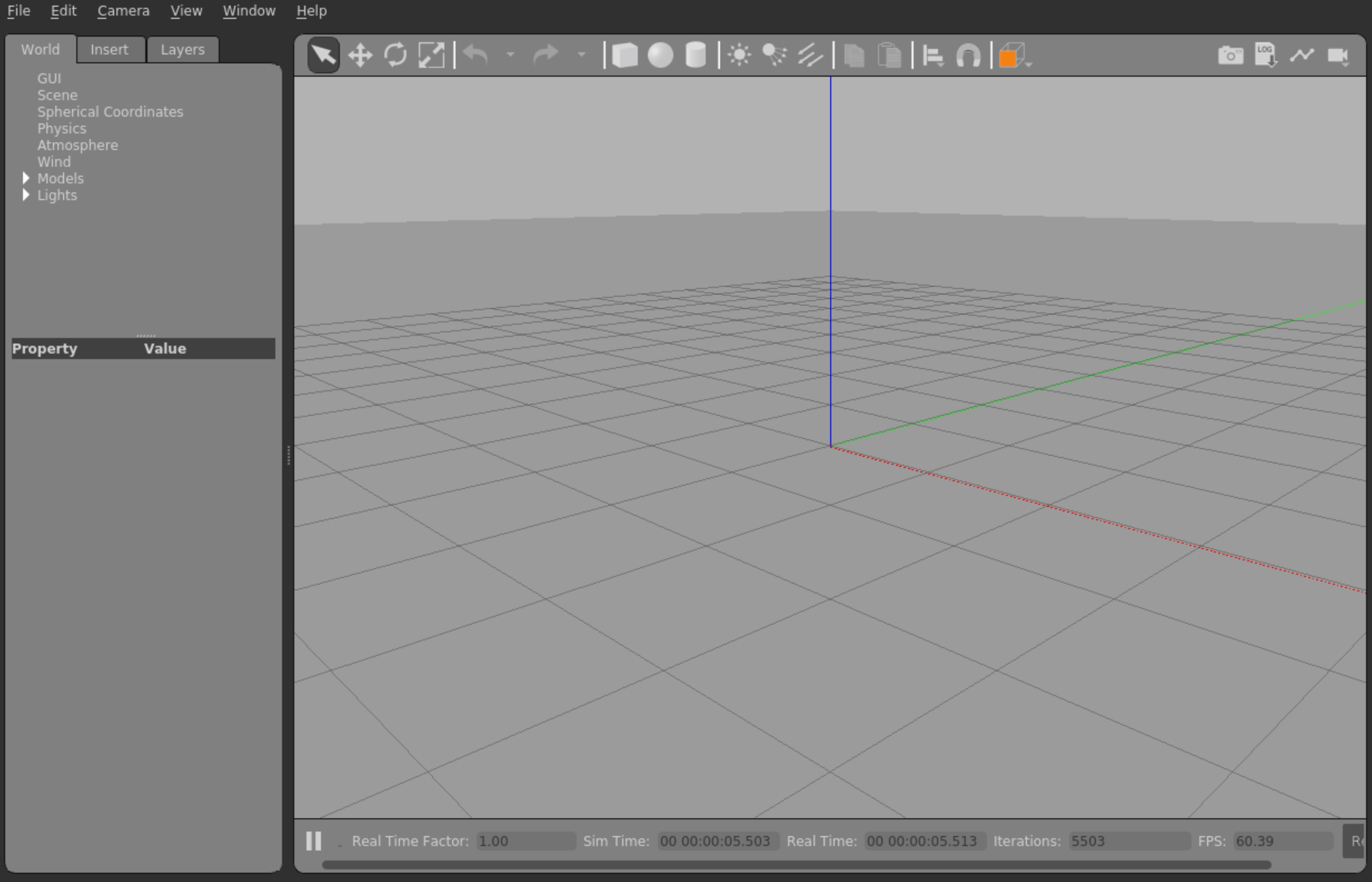
Gazebo의 실행 시 그래픽 카드 인식 문제가 발생하면 아래와 같이 어두운 화면이 등장합니다.
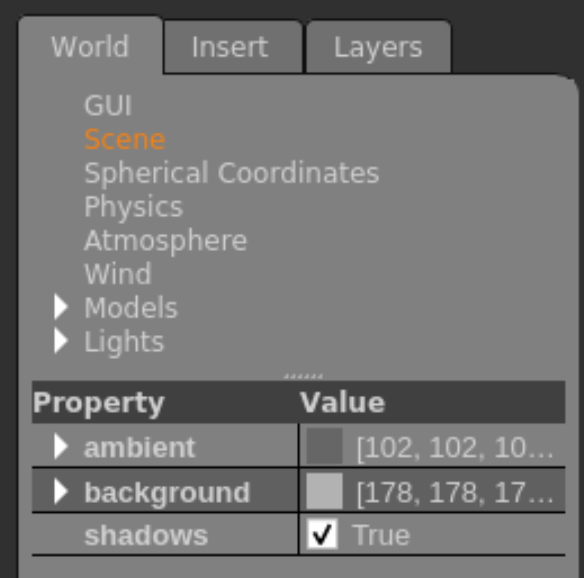
- 이러한 경우, World 탭 ⇒ Scene ⇒ Shadows 옵션을 토글해주시면 됩니다.
- 마지막입니다!
~/.bashrc를 수정합니다.
echo 'export GAZEBO_IP=127.0.0.1' >> ~/.bashrc
echo "export DISPLAY=$(cat /etc/resolv.conf | grep nameserver | awk '{print $2}'):0 " >> ~/.bashrc
echo 'export LIBGL_ALWAYS_INDIRECT=0' >> ~/.bashrc
발생할 수 있는 오류 상황들을 살펴보고 가겠습니다.
- gazebo 실행 시 symbol error
$ gazebo
gazebo: symbol lookup error: /usr/lib/x86_64-linux-gnu/libgazebo_common.so.9: undefined symbol: _ZN8ignition10fuel_tools12ClientConfig12SetUserAgentERKNSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEE
해결 방법 ⇒ sudo apt upgrade -y libignition-math2
-
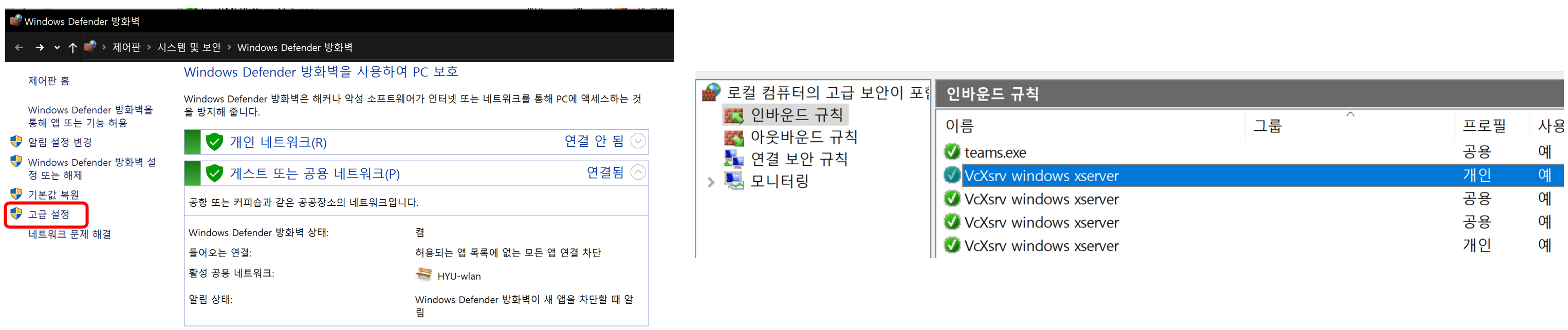
Gazebo 자체가 실행되지 않는 경우
PC 재시작 후 백신 프로그램을 종료시킵니다. 제어판 ⇒ 시스템 및 보안 ⇒ Windows 방화벽 ⇒ 고급 설정 ⇒ 인바운드 규칙 ⇒ VcXsrv 사용 허용
-
Gazebo는 실행되지만, Grid (실선)이 등장하지 않는 경우
안타깝지만 그래픽 드라이버 문제일 가능성이 큽니다. (Window ⇒ 업데이트 확인 진입 후 가장 최신 버전으로 모두 업그레이드를 실행해줍니다.)
Docker 기반의 ROS 설정
이전 설치 모두 실패하신 경우 사용할 수 있는 최후의 방법이자. MacOS 사용자들을 위한 설정입니다.
- docker desktop for windows를 설치합니다. ⇒ https://docs.docker.com/desktop/windows/install/
# 설치 확인
> docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
- 설치 확인 이후 동일한 명령 프롬프트에서 다음 커멘드 라인을 입력하여 도커 이미지를 다운받습니다. (해당 docker image는 강의에 필요한 작업을 제가 미리 준비해둔 것입니다.)
docker pull tge1375/du_ros_noetic:0.0.0
- docker 이미지를 최초 실행 시, 방금의 명령 프롬프트에서 아래와 같은 커멘드 라인을 입력해 주세요.
docker run -it -p 6080:80 --name ros_noetic tge1375/du_ros_noetic:0.0.0
- 입력 후 링크를 통해 로컬 VNC 서버로 접속이 가능합니다. 첫 실행 시 방화벽 보안 경고가 등장하며, 이때 반드시 엑세스를 허용해줍니다. ⇒ (http://127.0.0.1:6080/)
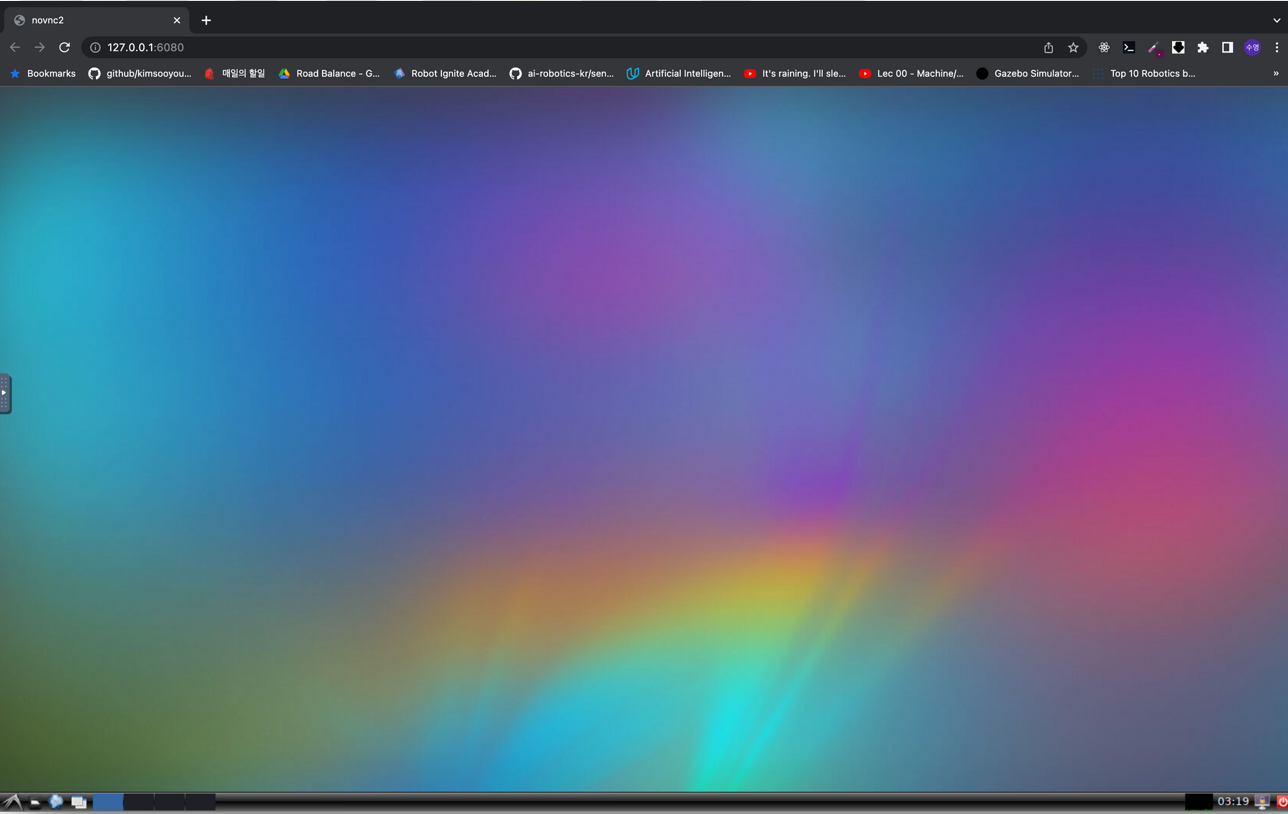
위와 같은 화면이 등장했다면 noVNC에 접속이 성공한 것입니다.
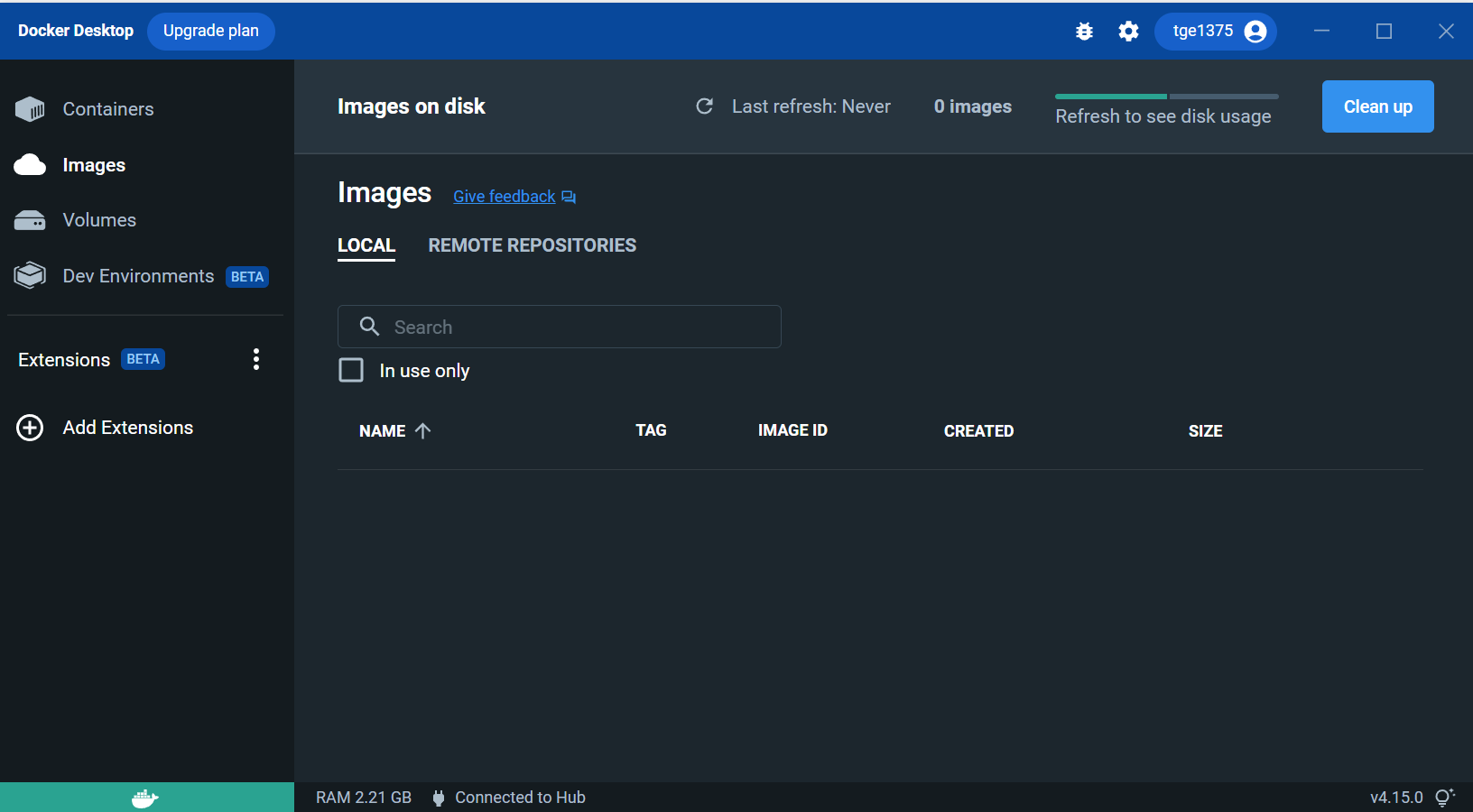
- 최초 명령 프롬프트에서 실행한 이후 다시 실행시키고 싶은 경우, 혹은 중지시키고 싶은 경우 docker desktop을 사용하면 매우 편리하게 작업이 가능합니다.
VScode 셋업
VNC내에서의 개발은 매우 불편하기 때문에, VScode를 통해 코드 개발을 하고자 합니다. 다음과 같은 extension들을 설치합시다.
- Docker
- Docker Explorer
- Remote Development
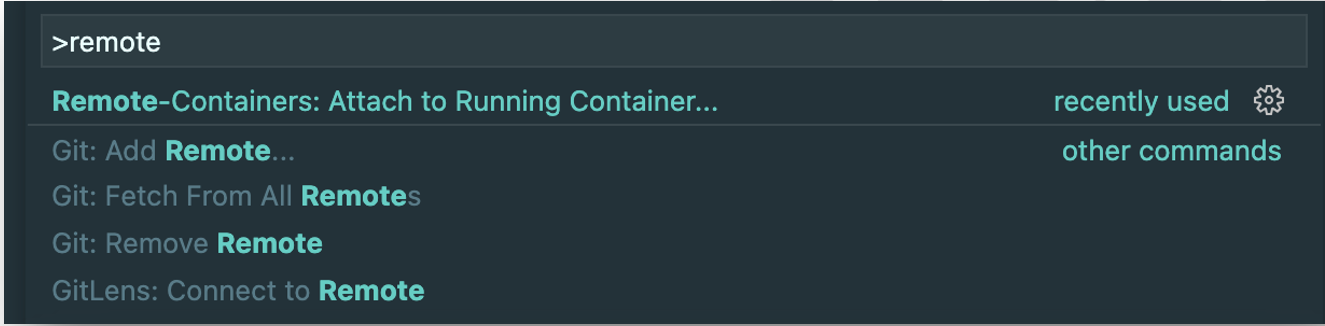
설치 이후, cmd + p를 통해 Remote-Containers를 입력하면, 현재 실행 중인 컨테이너의 목록을 조회할 수 있습니다.
이들 중 원하는 컨테이터를 선택하면, 새로운 vscode가 새로이 실행되며 작업 폴더를 설정하게 됩니다.
Linux Commands
셋팅한 환경은 모두 리눅스를 기반으로 합니다.
때문에 최소한의 리눅스 커멘드 지식이 필요하며, 짚고 넘어가겠습니다.
리눅스 필수 명령어
- cd <디렉토리> : 해당 디렉토리로 이동하기 (절대 경로와 상대 경로, ../ 와 ~/)
- pwd : 현재 위치한 절대 경로
- ls : 현재 디렉토리에 위치하는 모든 파일들 (ls -al 옵션)
- touch <파일 이름> : 해당 이름을 가진 파일 생성
- source : 쉘 스크립트 실행하기 (source ~/.bashrc)
강의를 위해 알아야 할 추가 명령어들
- sudo : root 권한으로 실행하기
- apt install / remove / purge : 리눅스 배포 패키지 설치
- apt update : apt의 상태를 최신화, 설치된 패키지들을 최신화하는 과정을 포함함
그 외 알아두면 좋은 것들
- top / htop : 리눅스의 작업 관리자
- ps aux : 실행 중인 프로세스 출력 (ps aux | grep ros)
- tee <파일 이름> : 터미널 로그를 기록하기
- xdg-open . : 현재 위치에서 파일 탐색기 열기
강의 중 설정된 Alias 설명
- eb : edit bashrc의 약자로 ~/.bashrc 파일을 gedit을 통해 수정할 수 있습니다.
- sb : source bashrc의 약자로 수정된 ~/.bashrc 파일을 반영시킵니다.
- killg : 실행중인 Gazebo관련 모든 프로그램을 종료시킵니다.
유용한 프로그램들 설치하기
sudo apt install gedit
sudo apt install terminator -y
코드 에디터와 IDE 추천
- VSCode - https://code.visualstudio.com/
- PyCharm - https://www.jetbrains.com/ko-kr/pycharm/download
- CLion - https://www.jetbrains.com/ko-kr/clion/
참고자료