Lecture3 - Core of ROS
지난 시간 개발환경 세팅을 잘 진행하였는지 확인을 해보면서 강의를 시작해보겠습니다.
터미널 프로그램을 실행한 뒤, gazebo를 실행해 봅시다.
gazebo
위 사진과 같은 화면이 나오지 않았다면 설치가 제대로 되지 않은 것입니다. (sudo apt install libgazebo11 을 통해 다시 설치해봅시다.)
About Gazebo
Gazebo의 특징과 기본적인 UI, 그리고 사용법을 짚고 넘어가고자 합니다.
![]()
- image from : Open Robotics
Gazebo는 로봇공학을 위해 제작된 전용 물리 엔진 기반의 높은 3D 시뮬레이터입니다.
ROS를 관리하는 Open Robotics에서 비롯된 시뮬레이터인만큼 ROS와 높은 호환성을 자랑합니다.
Gazebo는 실제 로봇을 위한 설계 검증 테스트와 시뮬레이션을 용이하게 하며, 윈도우, 맥, 리눅스에서 모두 실행되지만 대부분 리눅스 시스템에서 ROS와 함께 사용됩니다.
⇒ 이후 Gazebo 사용 및 오류 발생 시 디버깅을 위해, Gazebo를 구성하는 요소들을 간단하게 짚고 넘어가겠습니다.
gzserver & gzclient
Gazebo는 Socket-Based Communication을 갖습니다. 따라서 서버와 Client를 분리하여 실행 가능하며 다른 기기에서의 실행 후 연동도 가능합니다.
- Gazebo Server
gzserver는 Gazebo 동작의 대부분을 수행합니다. 시뮬레이션하려는 장면과 그 안에 있는 개체 파일을 분석하고, 그런 다음 물리 엔진과 센서 엔진을 사용하여 전체 장면을 시뮬레이션합니다.
터미널에서 다음 명령을 사용하여 서버를 독립적으로 시작할 수 있습니다.
$ gzserver
- Gazebo Client
gzclient는 gzserver에 연결하여 대화형 도구와 함께 시뮬레이션을 렌더링하는 Graphic Client를 제공합니다.
다음 명령을 사용하여 gzclient를 단독으로 실행할 수 있습니다.
$ gzclient
client만 실행하면, 연결되고 명령을 수신할 서버가 없기 때문에 (컴퓨팅 리소스를 소비하는 것을 제외하고) 아무 것도 하지 않습니다.
- Combining Gazebo Server and Gazebo Client
gzserver를 먼저 실행한 다음 gzclient를 실행하는 것이 일반적이며, 렌더링하기 전에 시뮬레이션 장면, 객체 관련 파라미터를 초기화할 수 있습니다.
gazebo 명령어를 입력하면 내부적으로 server와 client가 순차적으로 실행됩니다.
$ gazebo
이러한 이유로 Gazebo를 종료했다고 생각하지만 gzserver가 깔끔하게 종료되지 않는 상황이 발생합니다. ⇒ killg를 사용합시다!
World File과 Model File
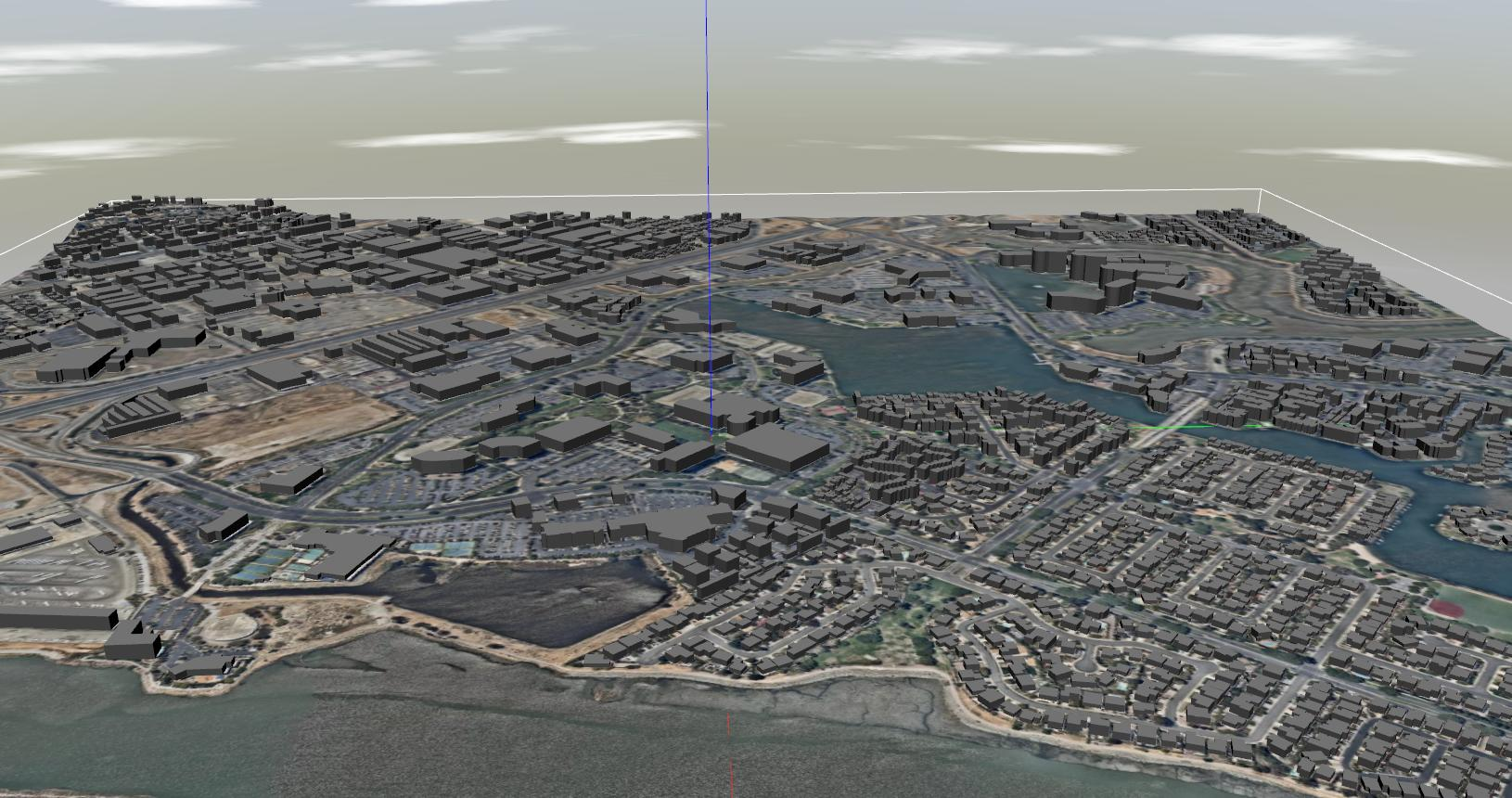
- image from : dronecode
- World Files
Gazebo world file에는 로봇 모델, 환경, 조명, 센서, 다른 기타 물체들까지 시뮬레이션 환경의 모든 요소가 포함되어 있습니다. 일반적으로 확장자명 .world를 사용합니다.
아래 예시와 같이 Gazebo 실행 시 world 파일을 옵션으로 하여 실행이 가능합니다.
$ gazebo <yourworld>.world
- Model Files
Gazebo의 World는 다양한 Model들로 구성됩니다. 하지만 Model만을 가지고 gazebo를 실행시킬 수는 없습니다. (gazebo 이렇게는 불가합니다.)
모델을 별도의 파일로 보관하는 이유는 다른 프로젝트에 재사용하기 위해서이며, 로봇의 모델 파일 또는 다른 모델을 월드 파일 내에 포함하려면 다음과 같이 태그를 통해 import 할 수 있습니다.
<include>
<uri>model://model_file_name</uri>
</include>
- Environment Variables
Gazebo에 World, Model을 연동하고, gzserver와 gzclient 간 통신을 설정하기 사용하는 많은 환경 변수가 있습니다.
예를 들어, GAZEBO_MODEL_PATH는 Gazebo가 모델 파일을 검색할 시 참조하는 경로입니다.
- Plugins
Gazebo의 World, Model에 장착되는 각종 센서와 제어를 위한 다양한 플러그인이 준비되어 있으며, 이러한 플러그인은 커멘드 라인에서 로드하거나 SDF 파일 내부에 추가할 수 있습니다. (자체 Plugin을 개발할 수도 있습니다.)
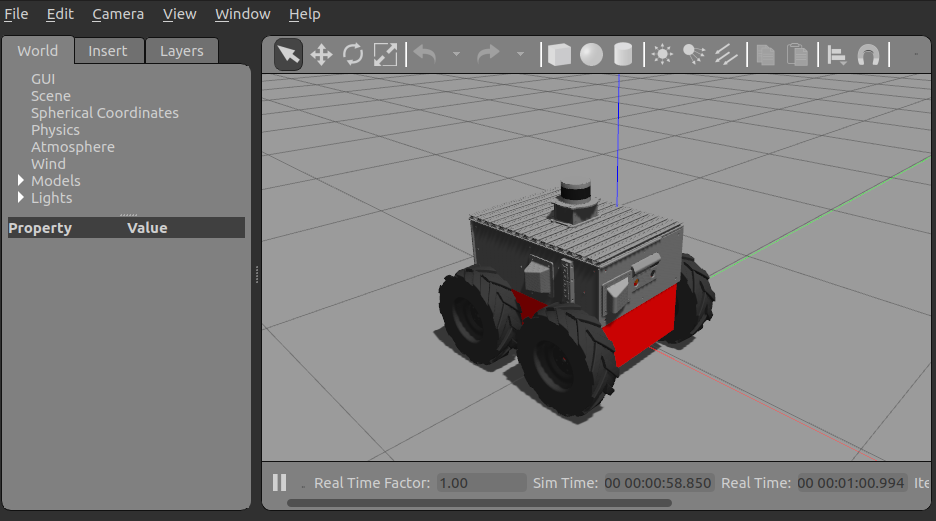
Understanding Gazebo GUI
이번에는 Gazebo의 기본 조작 방법과 내장 Tool들을 살펴보겠습니다.
- 우선 Gazebo를 실행시킵니다.
$ gazebo
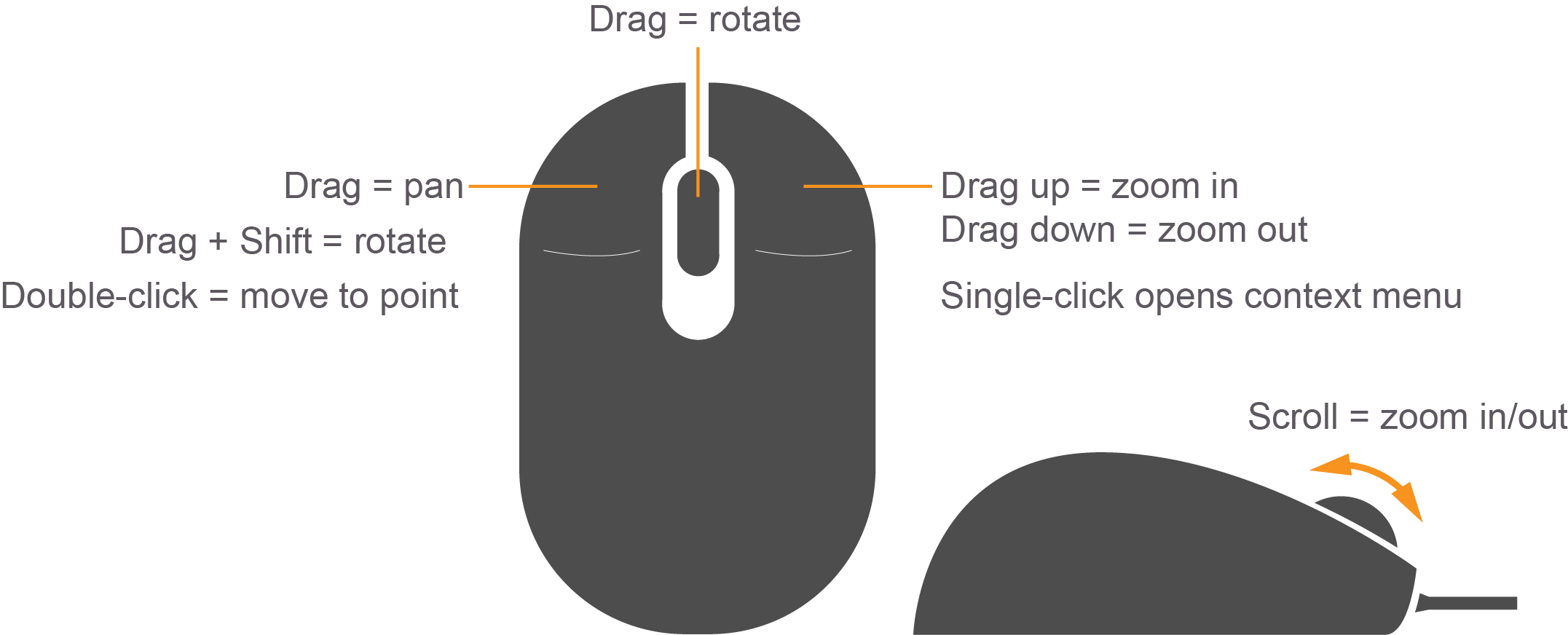
- Gazebo의 시점 변환은 마우스를 사용하여 손쉽게 조작 가능합니다.
- 마우스 왼쪽 버튼을 누르고 드래그하면 시점을 이동할 수 있습니다.
- 마우스 휠을 누른 상태로 이동시키면 회전 시점을 조작할 수 있습니다.
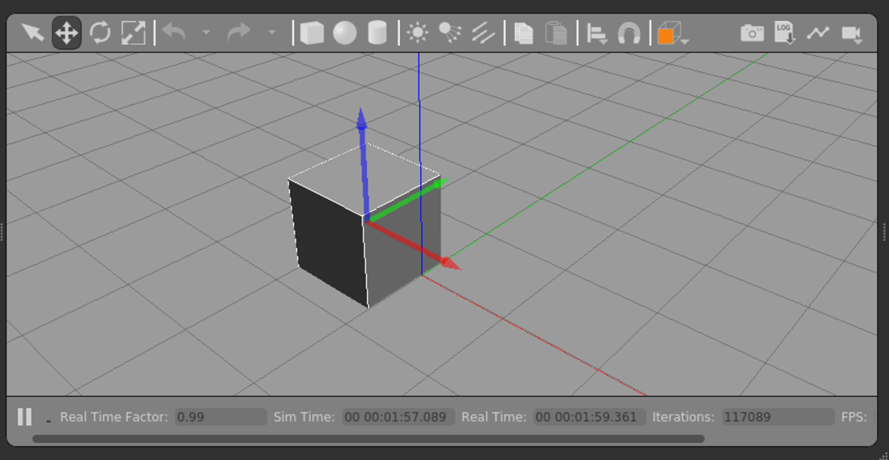
- 최상단에 위치한 Top Toolbar를 살펴보겠습니다.

왼쪽부터 오른쪽 순서대로 각 아이콘 별 기능을 설명해보겠습니다.
- Select mode
Select mode는 가장 일반적으로 사용되는 커서 모드입니다. 장면을 탐색할 수 있습니다.
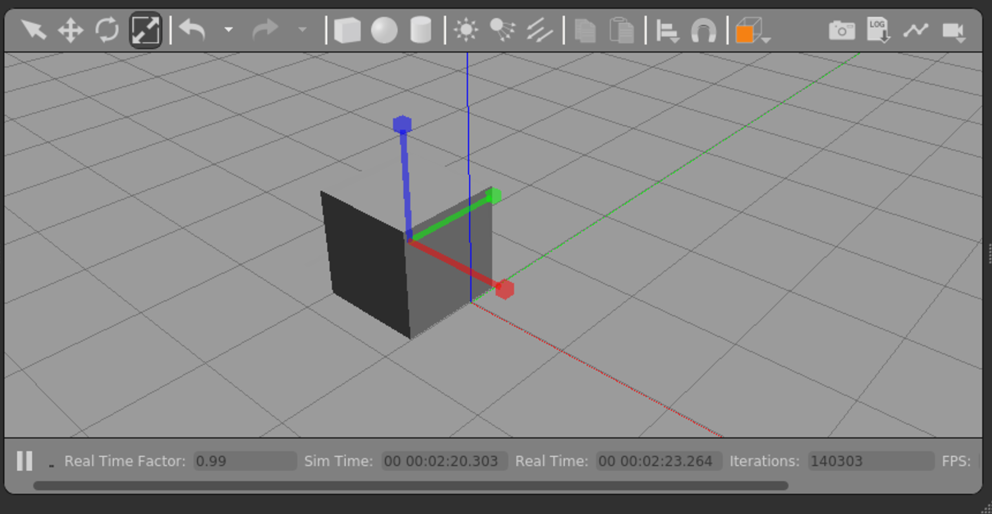
- Translate mode
커서 모드를 선택한 다음 이동시키길 원하는 객체를 클릭합니다. 이후 등장하는 3축 중 적절한 축을 사용하여 개체를 원하는 위치로 끌기만 하면 됩니다.
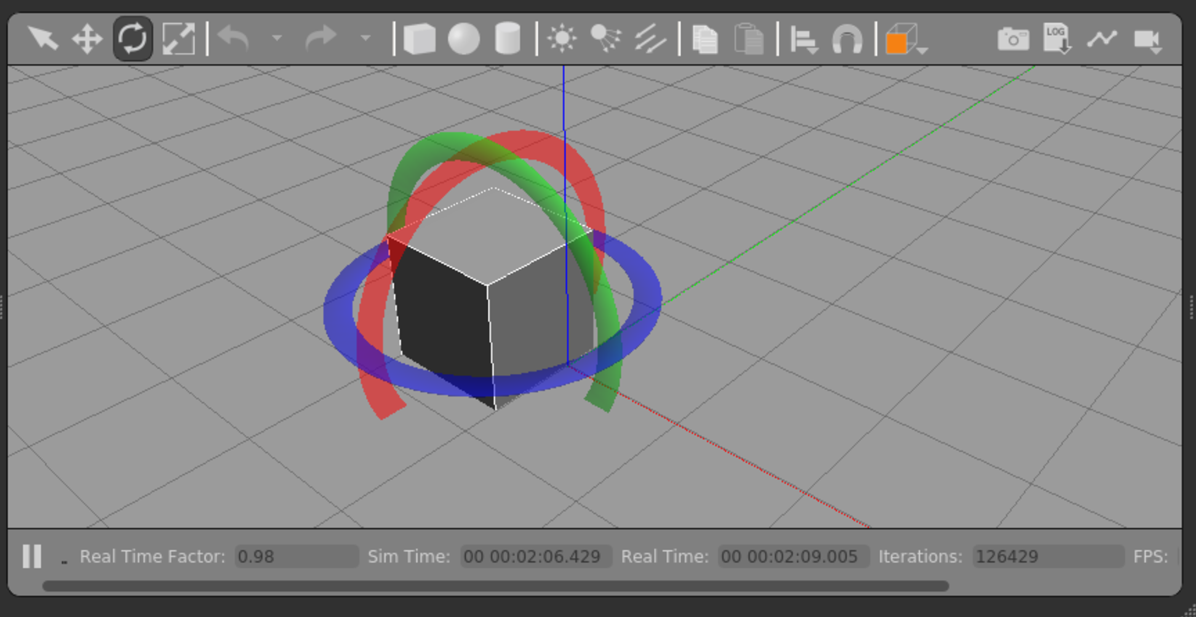
- Rotate mode
translate mode와 마찬가지로 이 커서 모드를 사용하면 주어진 모델의 방향을 변경할 수 있습니다.
- Scale mode
Scale mode를 사용하면 객체의 전체 크기를 변경할 수 있습니다.
- Undo/Redo
앞,뒤로 되돌리는 기능입니다.
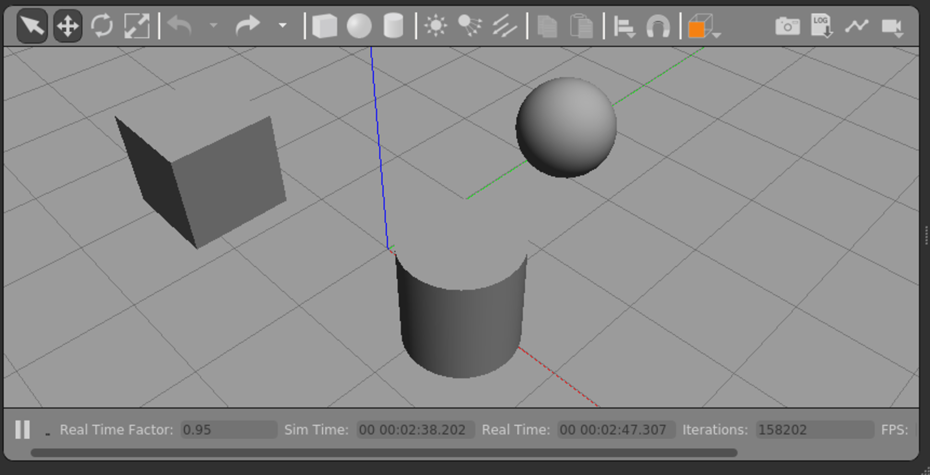
- Simple shapes
큐브, 구체 또는 실린더와 같은 기본 3D 모델을 환경에 삽입할 수 있습니다.
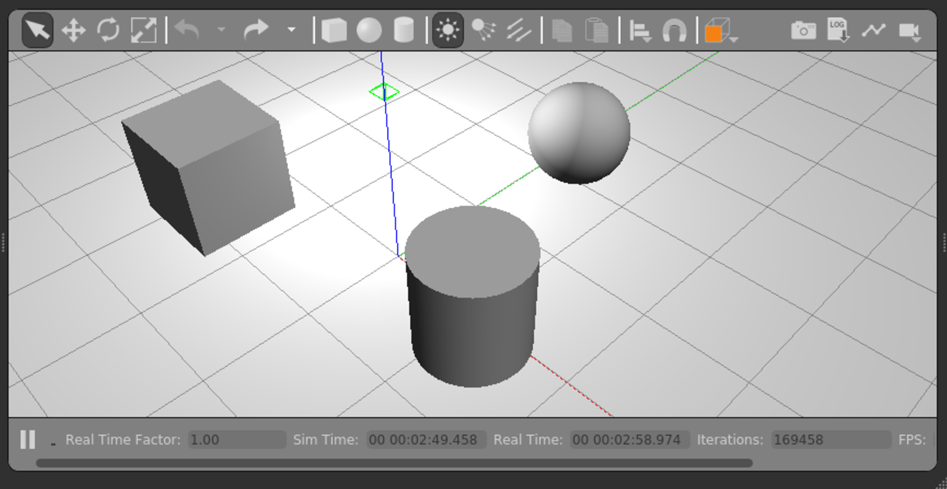
- Lights
스포트라이트, 포인트 라이트 또는 방향이 정해진 조명과 같은 다양한 광원을 환경에 추가합니다.
- Copy/Paste
모델을 복사/붙여넣을 수 있습니다. (Ctrl+C/V를 통해서도 가능합니다.)
- Align
이 도구를 사용하면 x y z 축 중 하나를 따라 한 모형을 다른 모델과 정렬할 수 있습니다.
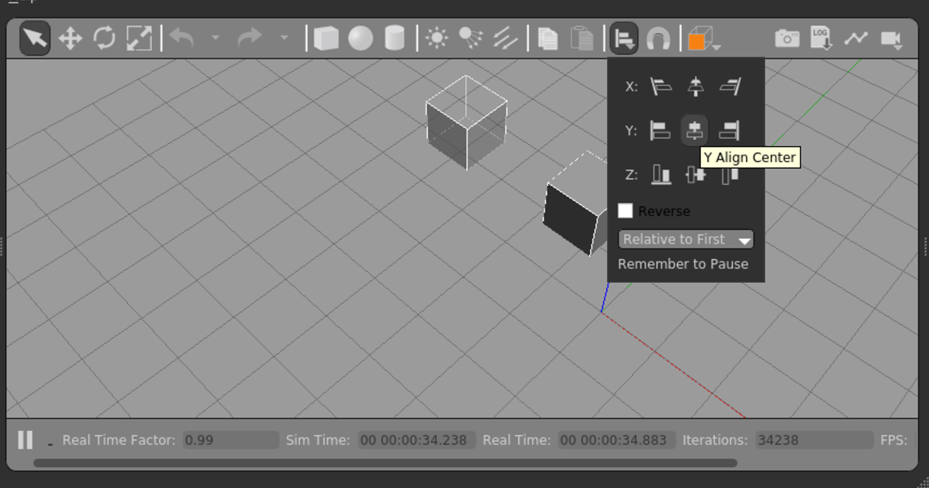
또는 두 모델을 특정한 면 기반으로 서로 붙이는 것도 가능합니다.
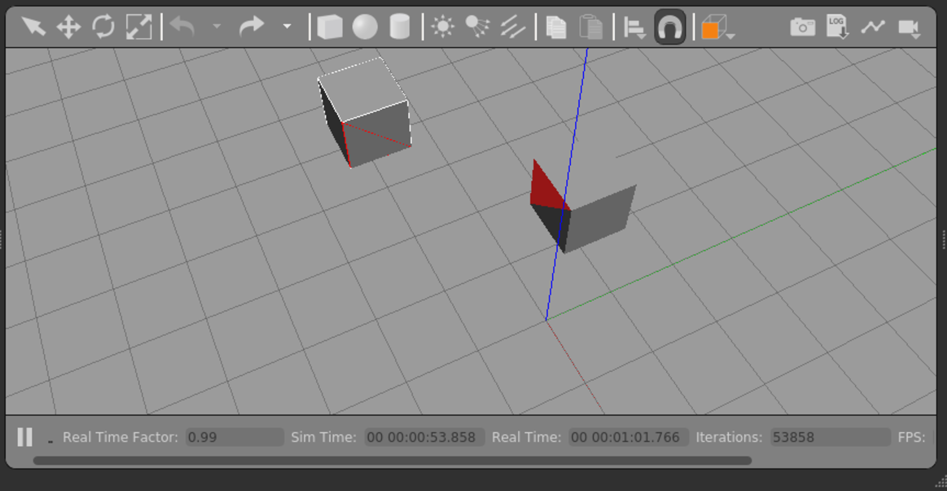
- Change view
상단 뷰, 측면 뷰, 전면 뷰, 하단 뷰와 같은 다양한 관점에서 장면을 볼 수 있습니다.
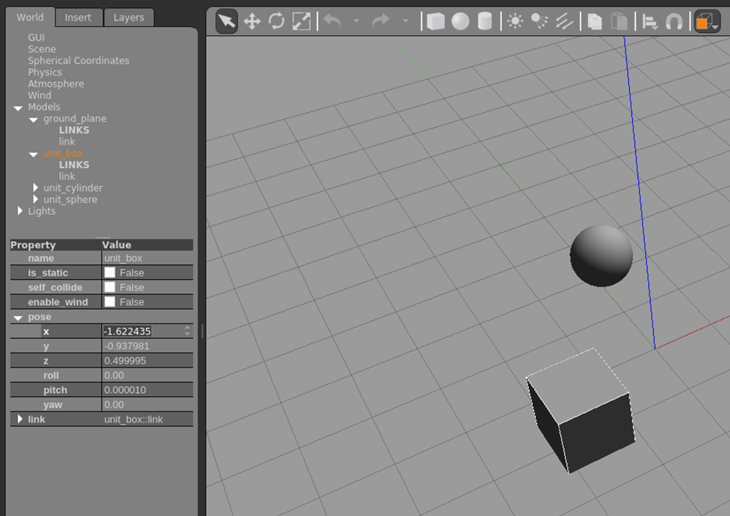
다음으로 Side Panel을 살펴보겠습니다.
- World
현재 사용중인 조명 및 모델들이 표시됩니다. 개별 모델을 클릭하여 위치 및 방향과 같은 모델의 기본 파라미터를 보거나 편집할 수 있습니다. 또한 물리 옵션을 통해 중력 및 자기장과 같은 물성치도 변경할 수 있습니다. GUI 옵션을 사용하면 기본 카메라 뷰 각도 및 포즈에 액세스할 수 있습니다.
- Insert
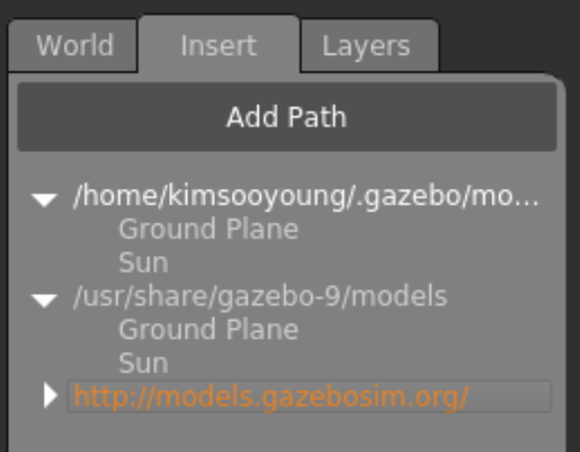
추가할 모델을 찾을 수 있습니다. 환경 변수에 지정된 폴더에서 모델들을 검색한 뒤 배치하는 것이 가능하며, 환경 변수 설정 없이도 Add Path 옵션을 통해 정해진 포멧을 갖는 모델을 가져올 수 있습니다.
다시 본론으로 돌아와서, ROS 설치는 잘 되었는지도 확인해봅시다.
# Terminal 1
roscore
# Terminal 2
rosrun rospy_tutorials talker
모든 확인이 끝났다면, 예제 프로그램을 실행시켜보겠습니다.
Husky Gazebo
- 예제 패키지 설치
sudo apt-get update
sudo apt-get install ros-noetic-husky-desktop
sudo apt-get install ros-noetic-husky-simulator
- 예제 프로그램 실행
# Terminal 1
roslaunch husky_gazebo husky_empty_world.launch
# Terminal 2
roslaunch husky_viz view_robot.launch
# Terminal 3
rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=/husky_velocity_controller/cmd_vel
Terminal 1에서 발생하는 아래 오류는 무시해도 좋습니다.
- 모든 실행이 정상 동작하였다면, Terminal 3에서 키보드를 통해 Husky를 제어할 수 있습니다.
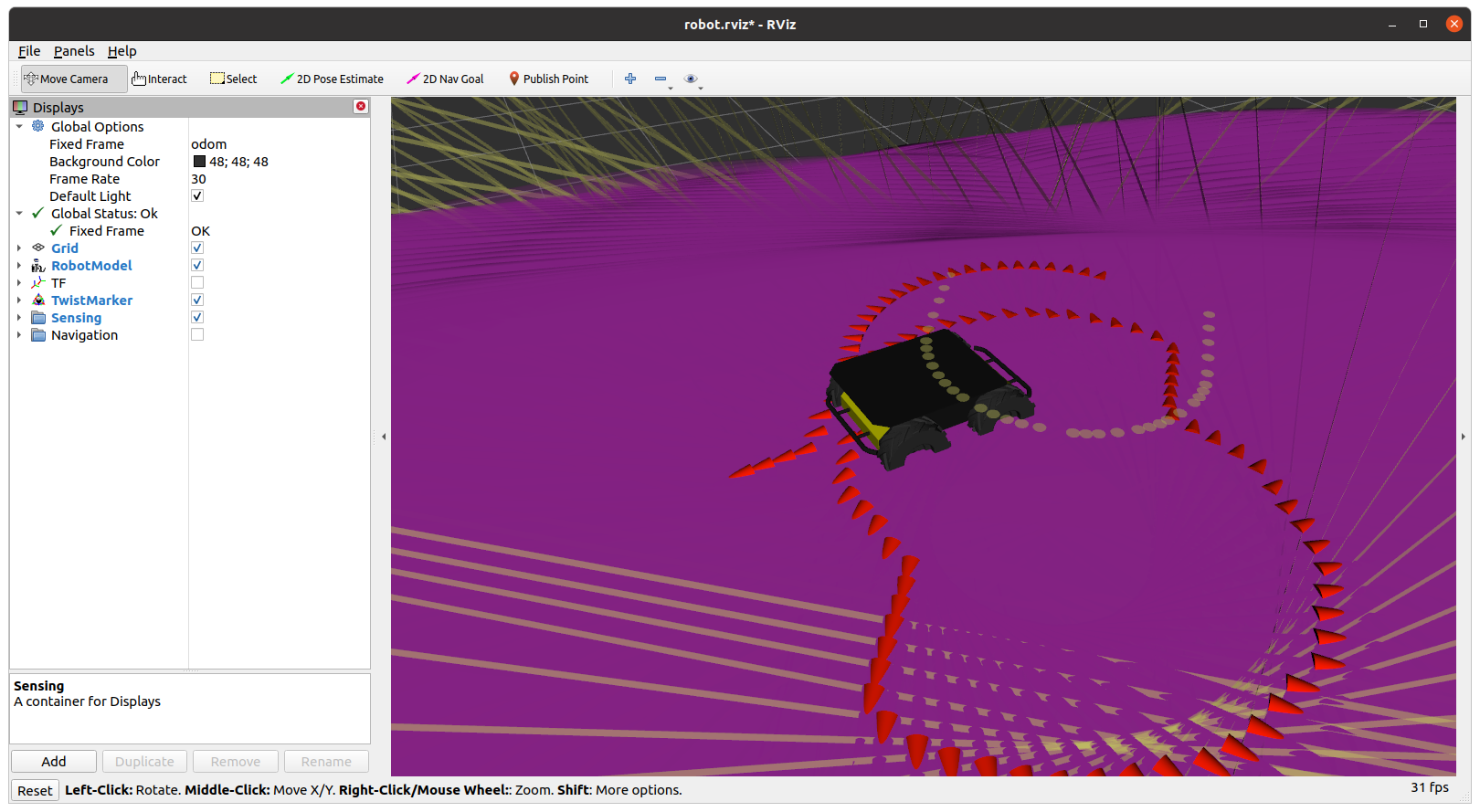
- 로봇이 움직임에 따라 두번째 터미널 결과였던 Rviz에 아래와 같은 변화가 생깁니다.
- 다음으로, 새로운 터미널에서 아래 커멘드 라인을 실행시켜 봅시다.
rosrun rqt_graph rqt_graph

위 그림은 방금 전 실행한 예제 내부적으로 어떠한 동작들이 이루어지고 있었는지를 보여주는 것으로, 강의를 마칠 때면 여러분들은 위 그림이 어떠한 의미를 갖는지 모두 이해하실 수 있을 것입니다.
다음으로, 터미널을 새로 실행시켜 rosnode list와 rostopic list를 실행시켜 봅시다.
- rosnode list
$ rosnode list
/base_controller_spawner
/ekf_localization
/gazebo
/gazebo_gui
/joy_teleop/joy_node
/joy_teleop/teleop_twist_joy
/robot_state_publisher
/rosout
/teleop_twist_keyboard
/twist_marker_server
/twist_mux
- rostopic list
$ rostopic list
/clock
/cmd_vel
/diagnostics
/e_stop
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
...
앞으로의 강의들에서, 위 명령어들이 어떠한 의미를 갖는지 하나하나씩 함께 살펴보겠습니다.
ROS Node
ROS는 각 프로세스들을 Node라는 단위로 관리합니다.
- 로봇을 움직이는 Node, 센서와 통신하는 Node, 시각화 Node 등 다양한 Node들이 얽혀 로봇 시스템을 구성하게 됩니다.
- Node들 사이에는 데이터의 송수신이 필요합니다. 이를 담당하는 ROS의 통신 메커니즘들이 있으며 각기 다른 특성을 갖고 있습니다.
- Node들끼리 데이터를 주고받기 위해서는 어떤 노드가 존재하는지, id는 몇번인지 등의 정보가 공유되어야 할 것입니다. 아래 그림의 ROS Master가 이를 관리해주는 것이라고 이해하시면 됩니다.
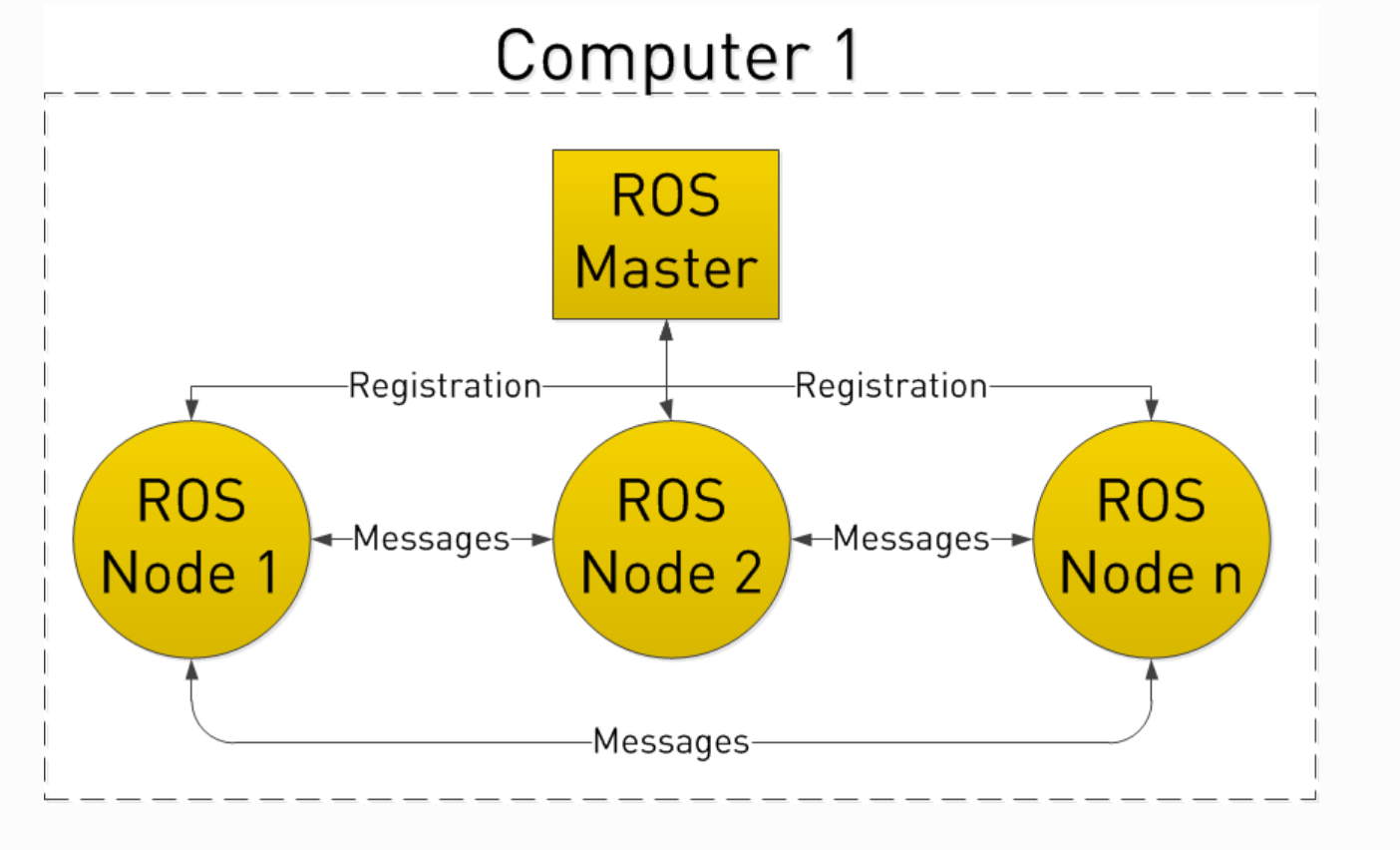
- image from : clearpathrobotics
그렇다면, 방금 우리가 실행한 예시에서도 ROS Master와 Node들이 실행되었겠군요!
실행되는 Node를 확인하는 방법은 크게 두 가지가 있습니다.
- rosnode command
$ rosnode list
/base_controller_spawner
/ekf_localization
/gazebo
/gazebo_gui
/joy_teleop/joy_node
/joy_teleop/teleop_twist_joy
/robot_state_publisher
/rosout
/teleop_twist_keyboard
/twist_marker_server
/twist_mux
- rqt_graph
rosrun rqt_graph rqt_graph
rqt graph를 살펴보면, 동그란 Node와 Node들 사이의 데이터 송수신이 화살표로 표현된 것을 알 수 있습니다. 키보드를 통해 제어 데이터를 송신하는 teleop_twist_keyboard는 gazebo node로 데이터를 보내고 있으며, 따라서 gazebo는 이 데이터를 통해 실제 로봇을 움직이게 되는 것입니다.

- 특정 Node에 대해서 더 자세한 정보를 얻고 싶다면,
rosnode info커맨드를 사용합니다.
$ rosnode info /base_controller_spawner
--------------------------------------------------------------------------------
Node [/base_controller_spawner]
Publications:
* /rosout [rosgraph_msgs/Log]
Subscriptions:
* /clock [rosgraph_msgs/Clock]
Services:
* /base_controller_spawner/get_loggers
* /base_controller_spawner/set_logger_level
contacting node http://192.168.55.236:33811/ ...
Pid: 63764
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (43329 - 192.168.55.236:34456) [10]
* transport: TCPROS
* topic: /clock
* to: /gazebo (http://192.168.55.236:33853/)
* direction: inbound
* transport: TCPROS
이전 예제들은 일단 종료시킨 뒤, 간단한 새로운 예시를 실행해봅시다.
# Terminal 1
roscore
# Terminal 2
rosrun roscpp_tutorials talker
# Terminal 3
rosrun roscpp_tutorials listener
# Terminal 4
rqt_graph
rqt_graph를 보면 talker ⇒ listener로 데이터가 전송되는 것을 알 수 있습니다.
이제, rqt_graph를 보는 것은 익숙해졌지요?

첫번째 Gazebo 예시와 다른 점으로 roscore라는 것을 실행해주었습니다.
- roscore는 ROS Master를 실행시키는 명령어로 모든 ROS Node들은 Master에 의해 관리되기 때문에 roscore를 통해 실행시키거나, roslaunch를 사용해야 합니다.
- ROS Master가 실행되고 있지 않다면, 아래와 같이 오류가 발생합니다.
ETH Super Mega Bot & ROS Workspace
- ROS는 catkin이라는 빌드 시스템을 사용합니다. 기존 c/c++ cross-platform 개발을 경험하셨다면 cmake에 익숙하실텐데, 이와 매우 비슷합니다.
- catkin을 통해 실행 가능한 프로그램 (C/C++의 빌드), 라이브러리, 인터페이스들을 만들 수 있으며, catkin 시스템을 사용하기 위해서는 workspace라는 특별한 폴더가 필요합니다.
- ROS 개발을 하다 보면 여러 프로젝트를 동시에 진행하는 경우가 생깁니다.
- 새로운 작업은 새로운 폴더를 만들어 작업하듯이 ROS 에서도 새로운 프로젝트는 새로운 WorkSpace에서 작업을 수행하는 것이 일반적입니다.
- 새로운 WS로 이동하게 되면 ROS에게 이러한 변화를 알려줘야 하며 이 명령어가 source devel/setup.bash 입니다.
- 이번 강의용 WS를 만들어보고, 이후 여러분들만의 WS도 만들어 작업해보세요!
일반적으로 ROS의 workspace는 name_ws라는 이름을 갖는 것이 일반적이며, 우리는 catkin_ws라는 workspace를 만들어보고자 합니다.
- 아래 커멘드 라인들을 따라해주세요
cd ~/
mkdir -p catkin_ws/src
cd catkin_ws
catkin config --init
catkin build
- 다음과 같이 build, devel, src, log 폴더가 만들어집니다.
- ROS 코드들은 모두 src 폴더 안에 위치하게 됩니다.
- src 폴더 내부에서 코드 개발 ⇒ catkin을 사용한 빌드 ⇒ build 폴더 내부에 실행 가능한 프로그램 생성의 순서로 개발이 이루어집니다.
실습을 통해 개발 프로세스에 익숙해져봅시다.
- 아래 폴더를 catkin_ws/src 안에 압축 해제합니다.
- 터미널 프로그램을 실행시키고 아래 커멘드 라인을 따라합니다.
catkin build smb_description
catkin build smb_gazebo
catkin build smb_control
source devel/setup.bash
source로 시작하는 마지막 라인은 새로운 빌드 후에 항상 실행해줘야 합니다. 1강을 잘 따라했다면 sds라는 단축어로 사용이 가능합니다.
- 예제 프로그램을 실행시킵니다.
roslaunch smb_gazebo smb_gazebo.launch
실행 시 붉은 에러 메세지가 나오지만 동작만 된다면 문제 없습니다.
- 이 로봇을 한번 움직여 볼까요? - teleop 실행
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
- 파일 구조 관점에서, ROS Application은 여러 Package들로 이루어집니다. 이들 Package가 소스 파일을 담고 있고, catkin이 이들을 빌드하여 실행 프로그램들을 만들었습니다.
- 제가 공유한 압축 파일 안에도 3개의 Package가 포함되어있던 것이며, ROS 개발자들은 자신들의 로봇 Package를 개발하고 공유합니다.
Package 생성 실습
Package를 생성하는 방법은 다음과 같습니다.
cd <your-ws>/src
catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
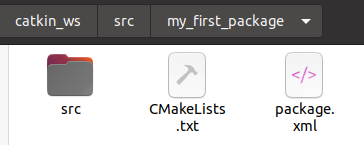
my_first_package라는 package를 시험삼아 생성해봅시다.
# exameple
$ catkin_create_pkg my_first_package rospy std_msgs
Created file my_first_package/package.xml
Created file my_first_package/CMakeLists.txt
Created folder my_first_package/src
Successfully created files in /home/kimsooyoung/catkin_ws/src/my_first_package. Please adjust the values in package.xml.
depend에는 해당 패키지의 의존성 패키지들이 나열되며, rospy는 파이썬을 통해 ROS를 사용하기 위한 의존성입니다.
미리 제공되었던 Package, smb_gazebo를 살펴봅시다.
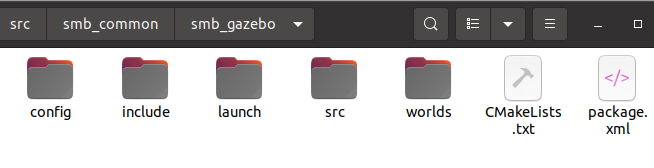
Gazebo 실행에 필요한 모델 파일과 환경 파일 등 기능별 정리된 모습을 볼 수 있습니다.
이렇게 Package를 잘 구성해두면 이후 코드의 관리에도 편리하다는 장점이 있습니다.
참고자료